
理解solvePnP算法
理解solvePnP算法
提问于 2017-09-28 01:38:07
我很难理解透视-n点问题。几个问题:
s是干什么用的?为什么我们需要一个比例因子作为图像点?K[R|T]是一个“坐标矩阵的变化”,它将p_w这个同质的世界点移动到二维图像平面的坐标空间中吗?- 我知道
[R|T]代表了相机相对于相应的世界点p_w的“旋转和平移”,这就是我们试图解决的问题。这有什么特别困难的?我们就不能说[R|T] =inv(K)s(p_c)inv(p_w)吗?我只是用一些基本的矩阵代数来做这个。 - 我不明白为什么PnP有多种解决方案..。这些多重解决方案到底是什么?
谢谢你的帮助!
回答 1
Stack Overflow用户
回答已采纳
发布于 2017-09-28 07:23:47
- 要确定从小距离观看的对象很少,还是从较高的距离查看大对象,需要刻度因子。
典型摄像机针孔方程
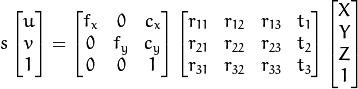
S表示相机坐标系中点的Z坐标。
- 对,
K[R|t]是投影矩阵,它将某个物体/世界/全球坐标系中的三维坐标映射到上面方程中的图像2d坐标中。 - 这并不容易,因为您通常不知道相机坐标系中的点坐标,而是知道图像坐标系中的2d坐标。相机坐标系与图像坐标系之间的变换是一维的,并且存在标度因子,使得方程不完全线性。这就是为什么计算起来不那么容易。
- 不同的算法使用不同的方法添加解决方案所需的附加信息。例如,直接线性变换( DLT )方法使用投影矩阵的特征。除了解析解外,还有许多采用非线性优化的方法,例如在openCV中使用的Levenberg-Marquardt方法。
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/46459654
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号