
同步多个微控制器
同步多个微控制器
提问于 2017-09-23 13:39:21
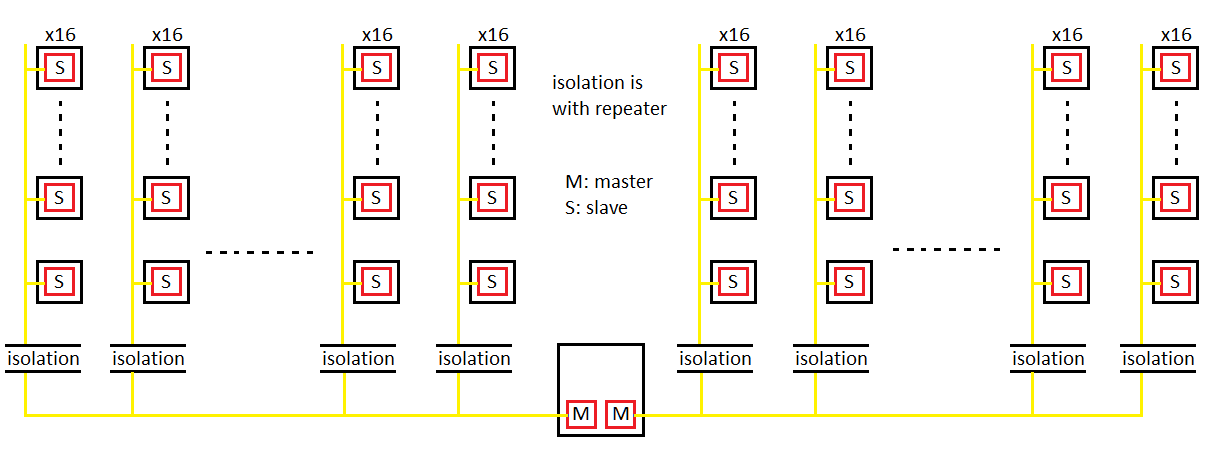
在我的项目中,我将使用modbus协议进行串行通信。有320多个奴隶,他们平均分开在两个组(见图)。每16个奴隶都是从相同的供给中获得动力,并以电流方式与其他人隔离的(主人将与所有奴隶隔离)。
我的第一个问题是这个设计是否有问题?
其次,我想通过来自主微控制器的10毫秒周期脉冲同步所有的从动器。如何实现健壮的同步(什么类型的总线,单信号或差分信号,哪里隔离)?
这里有一个替代方案:见图
{kind=link}
回答 1
Stack Overflow用户
回答已采纳
发布于 2017-09-27 13:11:48
在这里很多事情都可能出错。首先,你需要花很长的时间来调查你的每一个奴隶。而且你的隔离器会很容易地给你的同步信号带来超过2us的延迟。
你能简单地告诉我们你想具体做什么吗?同步运动控制?在工业解决方案中还有其他替代办法。
工业系统中的同步运动控制大多被用来代替机械凸轮和偏心齿轮,因此在这一领域通常被称为“电子凸轮”。以下是我在上一份工作中遇到的一些技巧
- 一个PLC,输出多个脉冲串,每一个命令一个单独的伺服/步进电机驱动器。PLC必须存储所有的运动轮廓,并进行所有的插值,这样就可以使用相对简单的驱动器。但是每个执行器都需要它自己的脉冲线路,而且你的系统中太多了。
- 电机驱动器存储运动轮廓&进行插补,运动由外部脉冲序列推进/逆转。这是一种用于达美自动化阿斯达和施耐德电气Lexium 23型工业伺服驱动器的技术。运动轮廓要么是预先刻录到驱动器的EEPROM中,要么是通过MODBUS编写的。这非常接近你想要做的事情,但是这里的区别是外部同步脉冲序列在一个单独的线路上。
- 实时以太网。在特定的间隔内,目标位置被周期性地写入每个驱动器。这可以在100 This时非常快地完成。至于写入不同驱动器时出现的延迟,有一个内置的机制来测量每个驱动器的延迟,然后对其进行相应的补偿。很酷吧?我见过但从未真正使用过的是贝克霍夫的EtherCAT。
过去,我主要是使用方法2,从这些经验来看,您可能不需要那么严格。以下是我的建议。
- 如果你的同步信号被延迟了一点,如果你的机制没有碰撞的风险,如果时间延迟一点的话,这将是非常好的。但是失去的脉冲是不能容忍的,因为其中一个执行器将失去相位。不要吝啬你的同步和通信电缆的质量,屏蔽双绞线,如果拥有,并正确连接他们。
- 如果通信线路不太长,则不需要隔离器。我的工作线高达8米,不需要隔离器或中继器。相反,我更担心在您的RS485总线上的支路(分支)连接的数量。如果可能的话,把所有的东西都直接连接到你的2辆主要公共汽车上。
- 如果这是一个生产系统,可能会有一个问题。当系统在同步运动模式下运行时,由于通信线路已被占用,因此无法监视执行机构。在实际应用程序中,这是不可接受的,但是如果这只是概念设计的证明,那就去做吧。
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/46380187
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号