
Python -解析图像上的对象
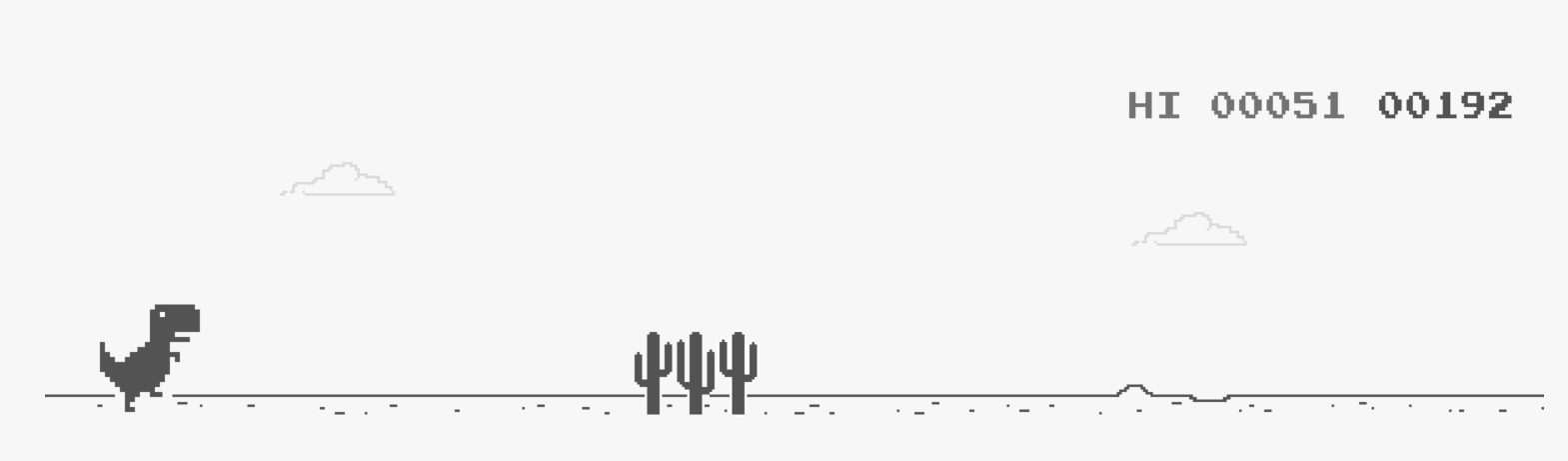
我需要检测图像上的物体从简单的游戏Chrome。我使用Python和Selenium开始游戏,并加载Canvas。主要目标是检测图像上的物体并找到Dyno和Dyno屏障。
我使用这段代码,使用OpenCV、cv2库解析图片上的所有对象。在这个代码下面(两个主要函数),大约需要80-200毫秒(根据障碍物大小)来识别所有对象。
`
# Finding only dino object based on Template.
# This might be optimized later with searching by contours
def find_dino__(self, cv2_image):
result = cv2.matchTemplate(cv2_image.astype(np.uint8), self.dino_image, cv2.TM_CCOEFF)
_, _, _, dino_top_left = cv2.minMaxLoc(result)
dino_bottom_right = (dino_top_left[0] + self.dino_width, dino_top_left[1] + self.dino_height)
return GenericGameObject(dino_top_left, dino_bottom_right)
# Find other Barrier Objects, based on position, and except
# that, which behind Dino location. Use Dino position.
def find_dino_barriers__(self, cv2_image, dino_object):
img_fil = cv2.medianBlur(cv2.cvtColor(cv2_image, cv2.COLOR_BGR2GRAY), 13)
img_th = cv2.adaptiveThreshold(img_fil, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 11, 2)
im2, contours, hierarchy = cv2.findContours(img_th, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
objects = []
for i in range(len(contours)):
x, y, w, h = cv2.boundingRect(contours[i])
if y < Settings.DINO_WORKING_Y_AREA[0] \
or y > Settings.DINO_WORKING_Y_AREA[1]:
continue
if x <= dino_object.top_right_point[0]\
and y <= dino_object.top_right_point[1]:
continue
objects.append(GenericGameObject((x, y), (x + w, y + h)))
return objects`
我的目标是减少,这一次,尽可能多,使游戏可供其他脚本玩。顺便说一句,我启发了IAMDinosaur项目,在那里使用JS和Robot完成了这个任务。
回答 1
Stack Overflow用户
发布于 2017-09-06 06:49:52
帮助加快速度的三大建议归结为同一件事:将图像的不同部分分割为处理管道的不同部分。有一个额外的速度,可以获得通过寻找不同的对象。这两个目标是查找dino位置,并在图像中找到新对象的位置。
加速比1
移除图像中the和对象不存在的部分.我指的是框架的上半部分。对象不在这里,这大大减少了搜索空间。
加速比2
我在你的帖子的评论中提到了这一点。不要在整个画面中寻找the。你知道the会在框架内的一些水平边界内停留,并且只垂直移动。模板匹配肯定是一个缓慢的过程,因此您将得到一个大的加速通过减少搜索区域。您可以通过使用更小的模板和更小的搜索区域来进一步完善这一点。再一次,你知道the会在某个区域,这意味着the的头或尾会在一个较小的区域--所以在这个区域搜索头尾或者任何东西。通过将搜索区域缩小到最后一个帧中的位置,您可以再次细化这一点。例如,我是在追踪马里奥中这样做的;您可以看到白色搜索区域框,它在马里奥的头部位于最后一帧的位置附近移动。
加速比3
请注意,您只需要找到新的objects...you,就知道滚动有多快,所以您知道一旦检测到对象移动的速度,以及它们在下一个帧中的位置。对象不是整个框架的宽度,它们一次只占帧的一定百分比。因此,实际上,当新对象从屏幕右侧进入时,您只需要搜索它们。然后,您可以标记它们(它们的宽度、高度、位置),然后计算它们的位置,而不是在每帧中再次找到它们。现在,您的轮廓搜索只发生在帧的一个较小的子集(更快)和您有较少的轮廓循环(更快)。
加速比4
请注意,您可以简单地通过“地面”线下的仙人掌底部来检测仙人掌。看起来类似高度的仙人掌有相似的宽度,所以如果你发现一个块,比如4像素宽,你知道仙人掌实际上比两边高出8个像素,有30像素高,或者不管实际值是多少。这会把你的问题变成探测仙人掌的底部而不是完整的仙人掌,大大减少了你对仙人掌的搜索范围。此外,您甚至不需要用这种方法找到等高线!您可以简单地在图像的底部查找块,并在它们小于预定义的距离时将它们组合在一起。这应该更快些。如果你这样做的话,你可能不需要担心仅仅检测到正确的边界上的物体,然后在新的frames...if中计算它们的新位置--你只需要为它们寻找一个4px宽的条带,它可能不会比找到每个帧快得多。
其他建议
我不太明白模糊化和自适应阈值化的意义。图像实际上是二进制的;黑色的或非黑色的像素。也许这是一种将多个独立的对象(比如一个单独的仙人掌)组合成一个组的方法?无论哪种方式,都可能有更好(更快)的方法来做到这一点;例如,如果您侵蚀了图像(这会扩展黑暗像素),那么仙人掌就会合并。我想这样会更快,但你需要测试一下。如果你这样做,你的轮廓就会比它们的实际宽度稍大一些,但是你可以通过使边框变小来补偿你正在扩展的像素。当然,这并不重要,如果您实现加速比4,但这是值得考虑的事情。
https://stackoverflow.com/questions/46061089
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号