
利用GPS测量校正SLAM漂移误差
我试图找出如何纠正SLAM方法引入的漂移误差,利用GPS测量,我在欧几里得三维空间中有两个点集,它们是在固定时刻拍摄的:
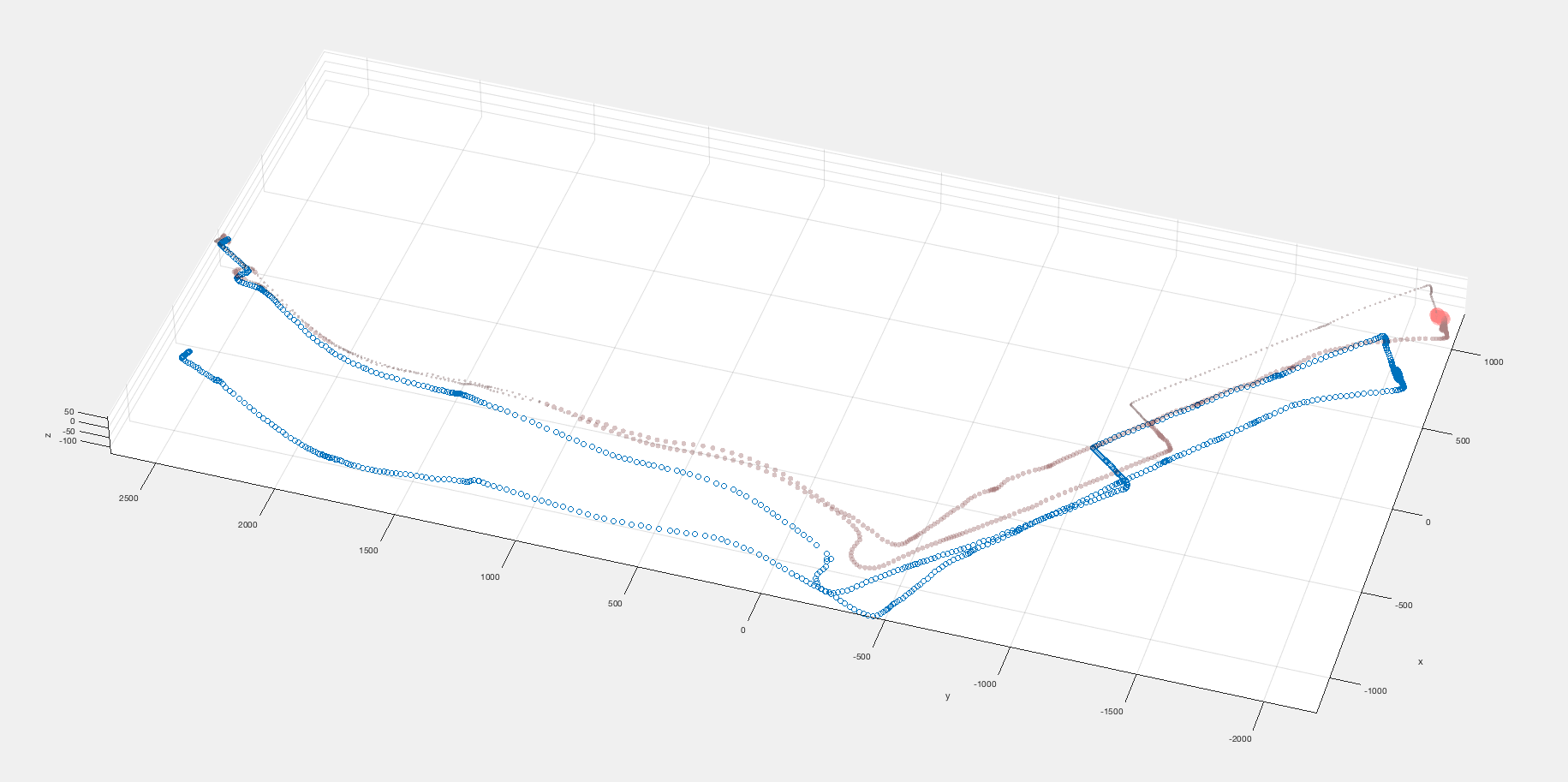
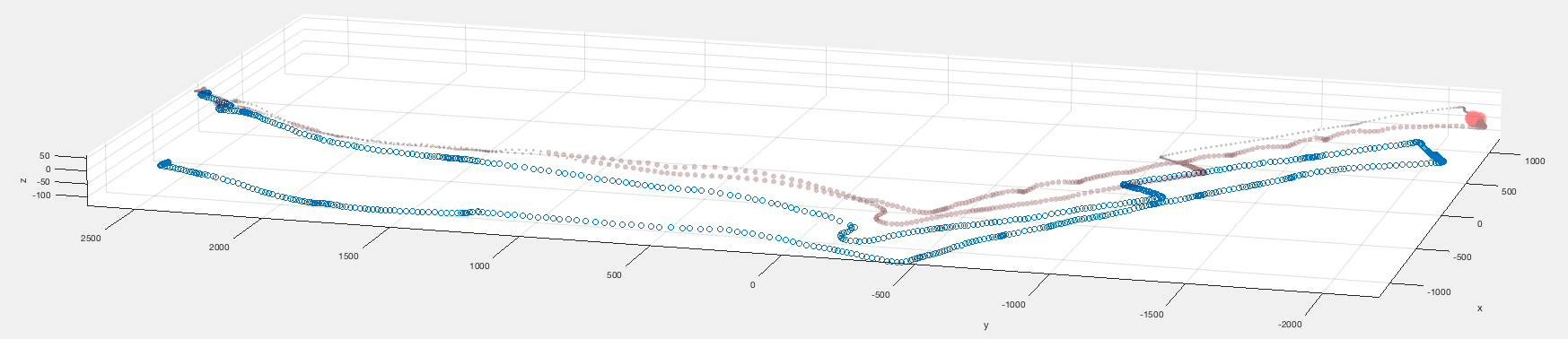
红色数据集由GPS引入,不存在漂移误差,而蓝色数据集基于SLAM算法,随时间推移而漂移。
他们的想法是,SLAM在短距离上是精确的,但最终是漂移的,而GPS在长距离上是精确的,在短距离上是不准确的。因此,我想弄清楚如何将SLAM数据与GPS融合,这样才能获得两种测量的最佳精度。至少该如何处理这个问题?
回答 1
Stack Overflow用户
发布于 2017-08-27 17:43:33
因为你的全球定位系统看起来非常局部偏倚,我假设它是低成本的,不使用任何校正技术,例如,它是没有差别的。您可能知道,GPS误差不是高斯的。本论文的研究表明,一种很好的建模方法是v+eps,其中v是一个局部常量的“偏差”向量(通常是一些metters的常数,然后或多或少地平滑或突然地变化),而eps是高斯噪声。
考虑到这些信息,一种选择是使用基于卡尔曼的融合,例如,将GPS噪声和偏差添加到状态向量中,并适当地定义您的转换方程,并像处理普通的EKF那样继续进行。请注意,如果忽略Kalman的预测步骤,这大致相当于将形式的误差函数最小化。
measurement_constraints + some_weight * GPS_constraints 这给了你一个更直截了当的,第二个选择。例如,如果SLAM是可视的,您可以只使用平方重投影误差之和(即束调整误差)作为度量约束,并将您的GPS约束定义为||x- x_{gps}||,其中x是2d或3d GPS位置(您可能想忽略低成本GPS的高度)。
如果你的SLAM是基于视觉和特征点的(你并没有说你使用的是哪种类型的SLAM,所以我假设是最广泛的类型),那么与上面任何一种方法的融合都会导致"inlier损失“。你做了一个突然的,猛烈的纠正,并增加了重新投影的错误。这意味着你在SLAM的跟踪中失去了轻量级。所以你必须重新定位点,等等。另外,请注意,尽管我所链接的这篇论文提供了一个GPS误差模型,但它并不是一个非常精确的模型,并且假设GPS误差的分布是单峰的(EKF所必需的),对我来说似乎有点冒险。
因此,我认为一个很好的选择是使用障碍项优化。基本上,我们的想法是:由于您并不真正知道如何建模GPS错误,假设您在本地对SLAM有更多的信任,并且最小化一个捕捉SLAM重建质量的函数S(x)。注意,x_opt是S的最小化器。然后,与全球定位系统数据融合,只要它不使S(x_opt)恶化超过一个给定的阈值。从数学上讲,你会想要最小化
some_coef/(thresh - S(X)) + ||x-x_{gps}||然后用x_opt初始化最小化。对于S来说,一个很好的选择是包调整错误,因为通过不降低它,就可以防止inlier损失。在文言文中还有其他S的选择,但它们通常是为了减少计算时间,并且在准确性方面几乎不增加什么。
这与EKF不同,没有很好的概率解释,但在实践中产生了非常好的结果(我也将它用于与GPS以外的其他事物的融合,而且效果很好)。例如,您可以看到这篇优秀的论文,它解释了如何彻底实现这一点,以及如何设置阈值,等等。
希望这能有所帮助。如果你在我的回答中发现不准确/错误,请告诉我。
https://stackoverflow.com/questions/45872659
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号