
基于神经网络的幕式半梯度Sarsa
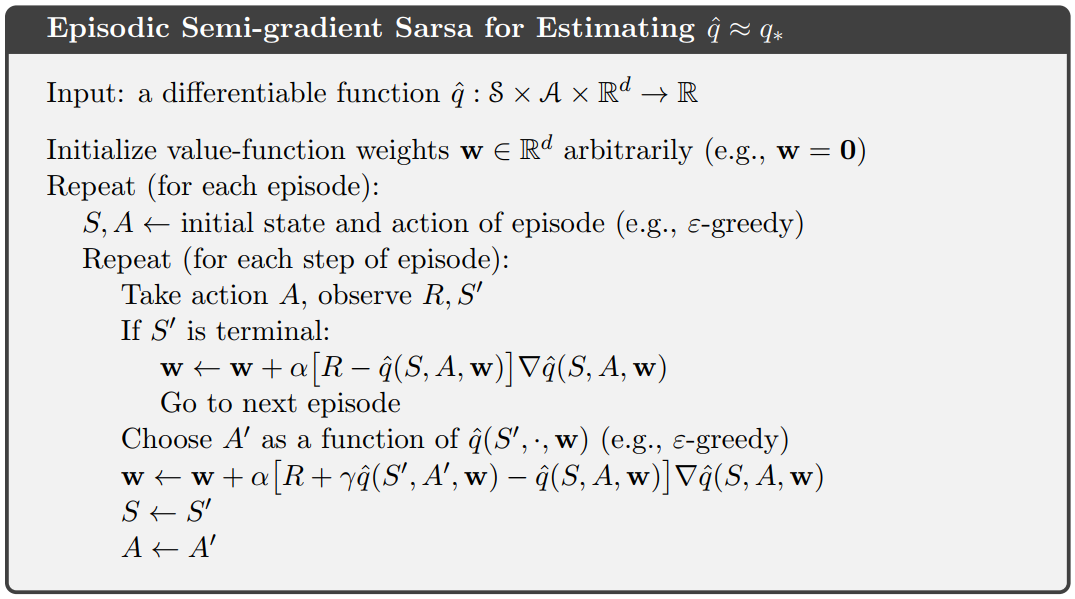
在尝试实现Episodic Semi-gradient Sarsa with神经网络作为逼近器时,我想知道如何根据当前学习到的网络权重来选择最优动作。如果动作空间是离散的,我只需计算当前状态下不同动作的估计值,就可以选择给出最大值的动作。但这似乎不是解决问题的最佳办法。此外,如果动作空间可以是连续的(例如,自动驾驶汽车的加速),则不起作用。
因此,我很想知道如何解决这个伪代码中的第10行Choose A' as a function of q(S', , w):
这些问题通常是如何解决的?可以推荐一个使用Keras的这个算法的好例子吗?
编辑:当使用网络作为逼近器时,我需要修改伪代码吗?所以,我简单地最小化了网络预测的MSE和奖励R,例如?
回答 1
Stack Overflow用户
发布于 2017-07-29 16:38:13
我想知道如何根据当前学习到的网络权重来选择最优的操作。
你有三个基本选择:
- 多次运行网络,对A‘的每个可能值运行一次,使其与您正在考虑的S’值一起运行。以最大值作为预测的最优操作(概率为1-ε,否则随机选择ε-贪婪策略,通常用于SARSA)
- 设计网络,一次估计所有的动作值--即有一个(一个或多个)的输出(也许是用来覆盖你需要过滤的“不可能的”动作)。这将稍微改变梯度计算,应该有零梯度应用于最后一层不活跃的输出(即任何不匹配A的(S,A))。同样,只需将最大有效输出作为估计的最佳操作即可。这可能比多次运行网络更有效。这也是最近玩机器人的DQN Atari游戏和AlphaGo的政策网络所采用的方法。
- 使用策略梯度法,它的工作方式是使用样本来估计梯度,从而改进策略估计器。您可以查看萨顿和巴托的第二版的第13章以获得更多详细信息。当有大量可能的行为时,策略梯度方法变得有吸引力,并且能够处理连续的行动空间(通过对最优策略的分布函数进行估计,例如选择正态分布的均值和标准差,您可以从中抽样来采取行动)。您还可以将策略梯度与演员批评方法中的状态值方法结合起来,这可以比纯策略梯度方法更有效地学习。
请注意,如果操作空间是连续的,则不必使用策略梯度方法,只需量化操作。此外,在某些情况下,即使在理论上是连续的,您也可能会发现最优策略只涉及使用极值(经典的山地汽车实例属于这一类,唯一有用的操作是最大加速度和最大向后加速)。
当使用网络作为逼近器时,我需要修改伪代码吗?所以,我简单地最小化了网络预测的最小均方误差,比如奖励
R?
不是的。在伪码中没有单独的损失函数,例如在监督学习中使用的MSE。误差项(通常称为TD错误)是由方括号中的部分给出的,并取得了类似的效果。字面上,术语w) q(S,A,∇(抱歉错过了帽子,在SO上没有LaTex )是指估计量本身的梯度,而不是任何损失函数的梯度。
https://stackoverflow.com/questions/45377404
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号