
OrientationSensor /测斜仪怪异,无文件记录的传感器面向地平线时的读数跳跃
我正试图升级我的一个应用程序,使用Windows 10移动设备传感器作为个人电脑的虚拟现实设备(比如)。当设备从指向地平线以下变为地平线上方时,我在传感器读出方面遇到了问题(同时发生在景观和人像上,但是在这种情况下,只有景观才是重要的)。小品:
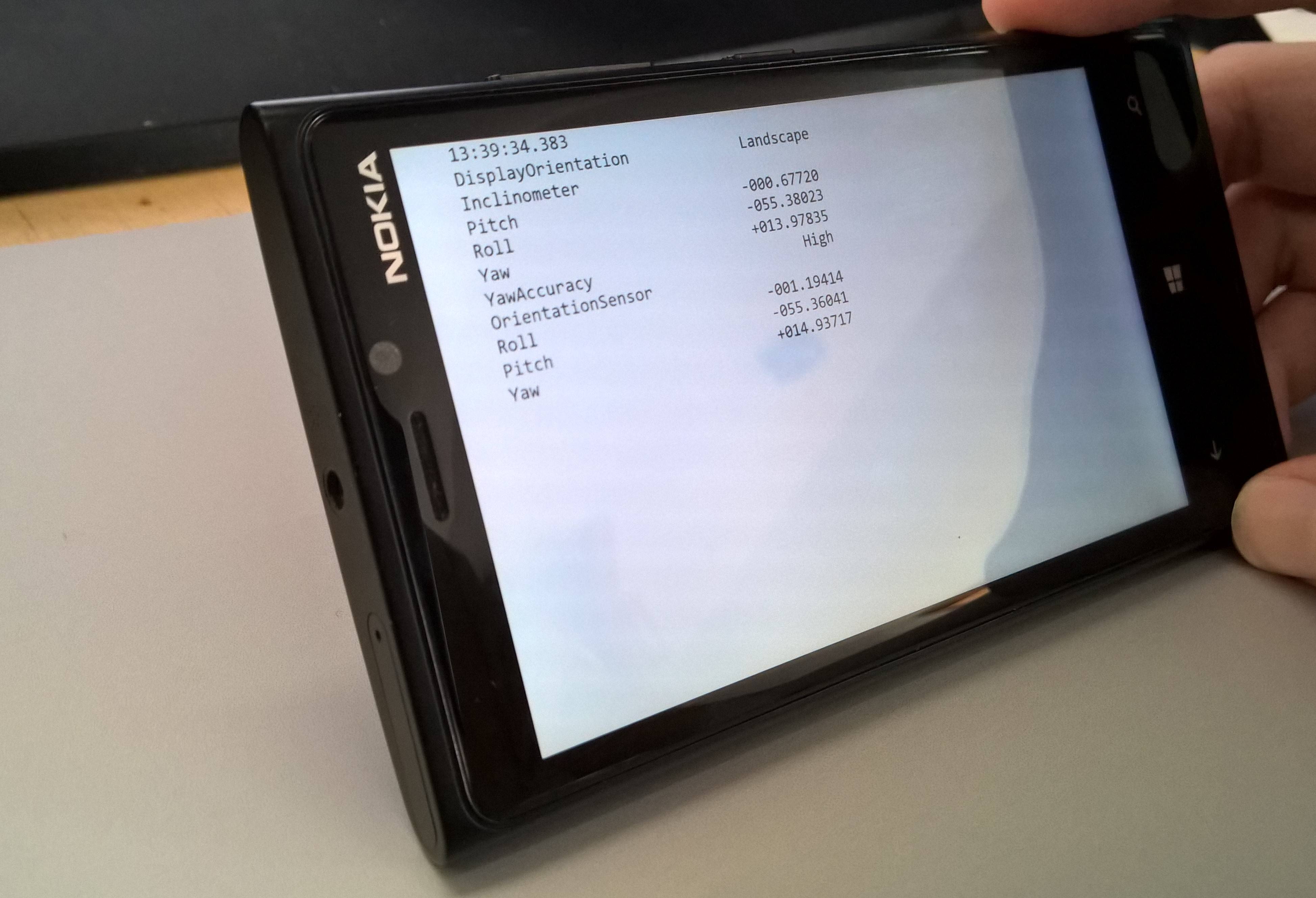
原始传感器读数(向下指向):
倾斜计俯仰:-000.677,滚动:-055.380,偏航:+013.978
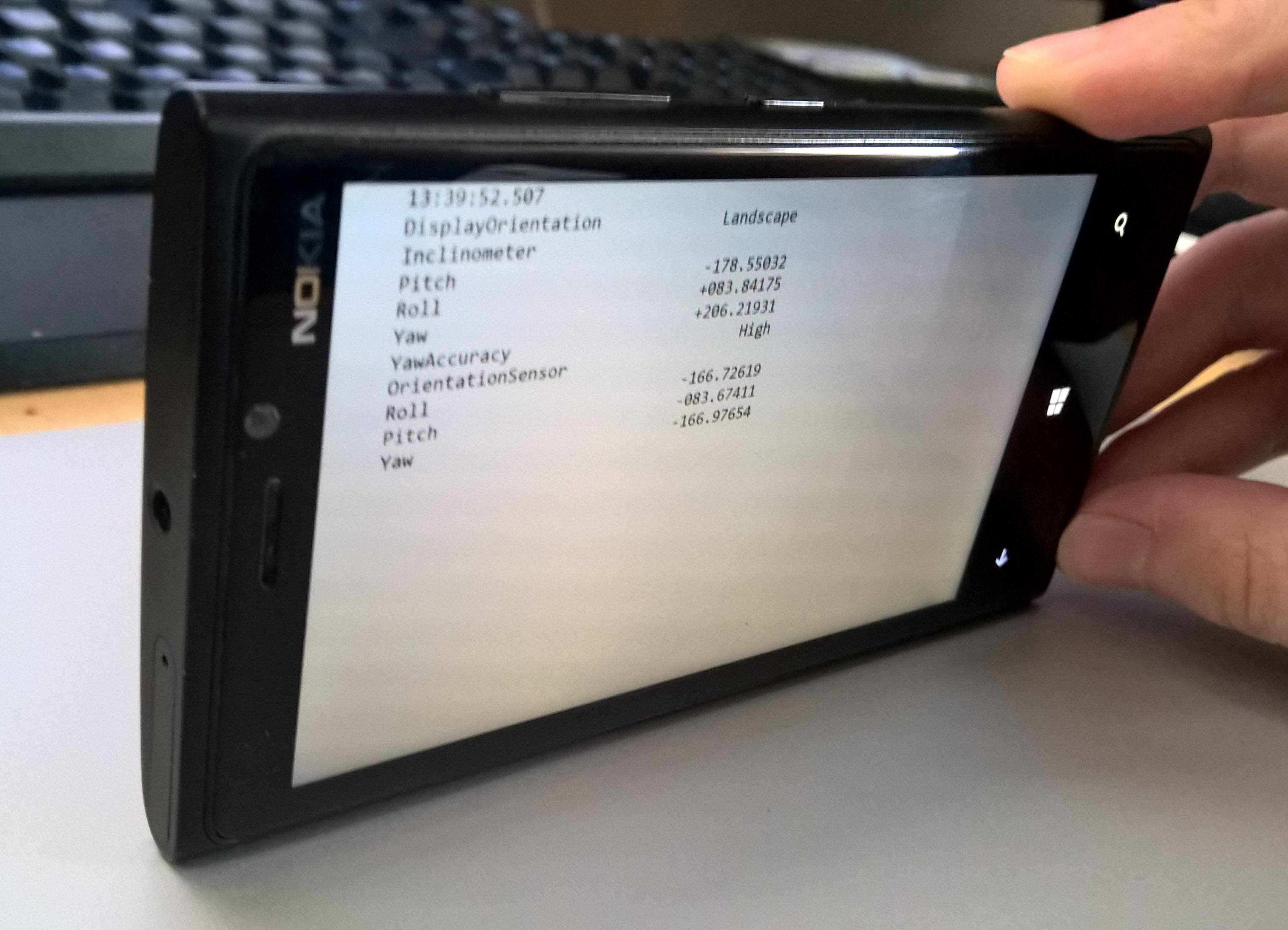
现在改为向上指向:
倾斜计俯仰:-178.550,滚动:+083.841,偏航:+206.219
正如您所看到的,所有3个值都发生了很大的变化。在现实中,只有一个轴应该改变,滚动或俯仰(取决于传感器的方向)
我95%肯定,这个问题在Windows 8中并不存在。我找不到任何关于传感器这种奇怪行为的文档,它阻止了我创建增强现实和虚拟现实应用程序。
以下是问题的两张图片:
下面是这个演示的代码:
<Grid Background="{ThemeResource ApplicationPageBackgroundThemeBrush}">
<TextBlock Style="{StaticResource BodyTextBlockStyle}"
x:Name="output"
FontFamily="Consolas"
Foreground="Black"
Text="test"/>
</Grid>代码背后:
public MainPage()
{
this.InitializeComponent();
timer = new DispatcherTimer();
timer.Interval = TimeSpan.FromMilliseconds(250);
timer.Tick += Timer_Tick;
}
private void Timer_Tick(object sender, object e)
{
output.Text = "";
output.Text = DateTime.Now.ToString("HH:mm:ss.fff") + Environment.NewLine;
Print();
}
DispatcherTimer timer;
public void WriteValue(String desc, String val)
{
StringBuilder b = new StringBuilder();
int length = desc.Length + val.Length;
int topad = 40 - length;
if (topad < 0)
topad = length - 40;
output.Text += desc + val.PadLeft(topad + val.Length) + Environment.NewLine;
}
public String ValueToString(double value)
{
String ret = value.ToString("000.00000");
if (value > 0)
ret = " +" + ret;
else if (value == 0)
ret = " " + ret;
else
ret = " " + ret;
return ret;
}
public static double RadianToDegree(double radians)
{
return radians * (180 / Math.PI);
}
public void Print()
{
WriteValue("DisplayOrientation", LastDisplayOrient.ToString());
WriteValue("Inclinometer", "");
WriteValue("Pitch", ValueToString(LastIncline.PitchDegrees));
WriteValue("Roll", ValueToString(LastIncline.RollDegrees));
WriteValue("Yaw", ValueToString(LastIncline.YawDegrees));
WriteValue("YawAccuracy", LastIncline.YawAccuracy.ToString());
WriteValue("OrientationSensor", "");
var q = LastOrient.Quaternion;
double ysqr = q.Y * q.Y;
// roll (x-axis rotation)
double t0 = +2.0f * (q.W * q.X + q.Y * q.Z);
double t1 = +1.0f - 2.0f * (q.X * q.X + ysqr);
double Roll = RadianToDegree(Math.Atan2(t0, t1));
// pitch (y-axis rotation)
double t2 = +2.0f * (q.W * q.Y - q.Z * q.X);
t2 = t2 > 1.0f ? 1.0f : t2;
t2 = t2 < -1.0f ? -1.0f : t2;
double Pitch = RadianToDegree(Math.Asin(t2));
// yaw (z-axis rotation)
double t3 = +2.0f * (q.W * q.Z + q.X * q.Y);
double t4 = +1.0f - 2.0f * (ysqr + q.Z * q.Z);
double Yaw = RadianToDegree(Math.Atan2(t3, t4));
WriteValue("Roll", ValueToString(Roll));
WriteValue("Pitch", ValueToString(Pitch));
WriteValue("Yaw", ValueToString(Yaw));
}
Inclinometer sIncline;
DisplayInformation sDisplay;
OrientationSensor sOrient;
protected override void OnNavigatedTo(NavigationEventArgs e)
{
base.OnNavigatedTo(e);
sIncline = Inclinometer.GetDefault(SensorReadingType.Absolute);
sDisplay = DisplayInformation.GetForCurrentView();
sOrient = OrientationSensor.GetDefault(SensorReadingType.Absolute);
sOrient.ReadingChanged += SOrient_ReadingChanged;
sDisplay.OrientationChanged += SDisplay_OrientationChanged;
sIncline.ReadingChanged += SIncline_ReadingChanged;
LastDisplayOrient = sDisplay.CurrentOrientation;
LastIncline = sIncline.GetCurrentReading();
LastOrient = sOrient.GetCurrentReading();
timer.Start();
}
private void SOrient_ReadingChanged(OrientationSensor sender, OrientationSensorReadingChangedEventArgs args)
{
LastOrient = args.Reading;
}
private void SDisplay_OrientationChanged(DisplayInformation sender, object args)
{
LastDisplayOrient = sDisplay.CurrentOrientation;
}
OrientationSensorReading LastOrient;
InclinometerReading LastIncline;
DisplayOrientations LastDisplayOrient;
private void SIncline_ReadingChanged(Inclinometer sender, InclinometerReadingChangedEventArgs args)
{
LastIncline = args.Reading;
}
protected override void OnNavigatingFrom(NavigatingCancelEventArgs e)
{
base.OnNavigatingFrom(e);
sIncline.ReadingChanged -= SIncline_ReadingChanged;
sDisplay.OrientationChanged -= SDisplay_OrientationChanged;
sOrient.ReadingChanged -= SOrient_ReadingChanged;
timer.Stop();
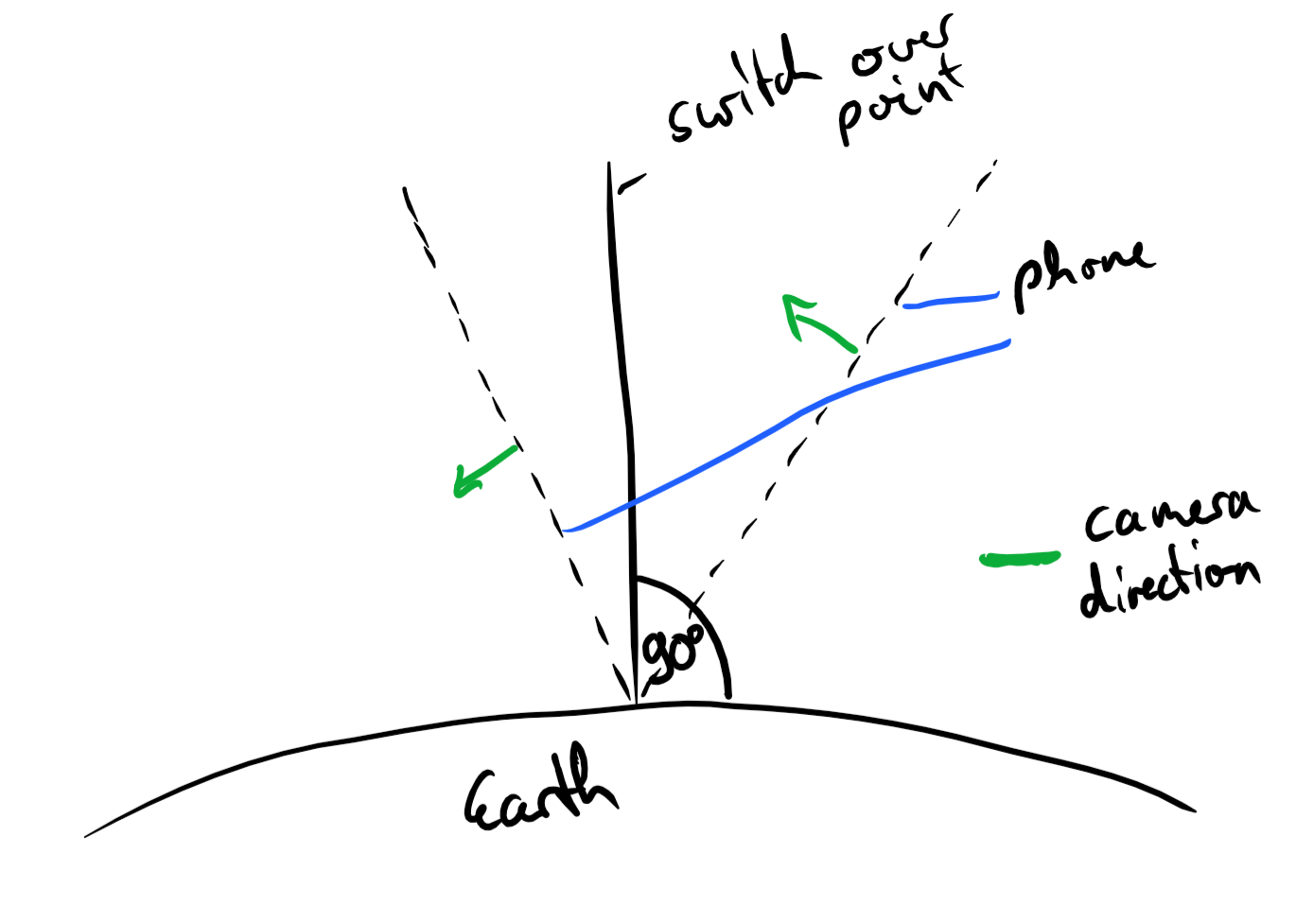
}编辑:添加了以下草图和更多描述
看一看下面的更深入的草图:
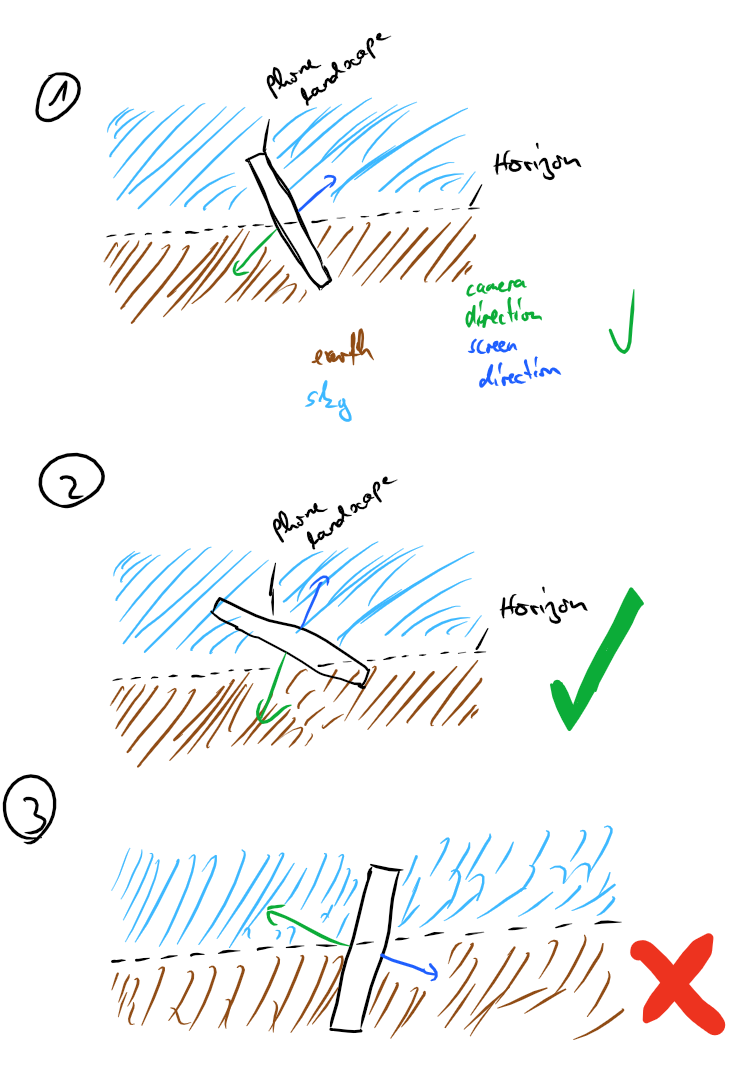
如步骤(1)所示,将电话定位。手机在景观模式下,相机朝下,屏幕朝上。
改为步骤(2)。你稍微向前倾斜,只有一个轴应该改变(在这种情况下,测斜仪只会显示“滚动”变化。)这是正确的)
改为步骤(3)。你现在向后倾斜你的手机。一旦切换点来,那里的相机不再面对地面,但现在天空和屏幕正面临略微向下,所有三个数值都有很大的变化。俯仰将跳跃约-180°,滚动将额外跳约90°,你实际改变的数量,而偏航将跳跃约+180°。
只要相机只指向地球或天空,传感器就会表现得很好!只有当从一个切换到另一个时,这个问题才会发生!(这个场景总是发生在VR和AR上,所以这是一个大问题)
回答 1
Stack Overflow用户
发布于 2017-07-11 09:16:52
原始传感器读数(向下指向): 倾斜计俯仰:-000.677,滚动:-055.380,偏航:+013.978 现在改为向上指向: 倾斜计俯仰:-178.550,滚动:+083.841,偏航:+206.219 正如您所看到的,所有3个值都发生了很大的变化。在现实中,只有一个轴应该改变,滚动或俯仰(取决于传感器的方向)
你的考试不严格。如果您想观察Roll和Pitch,您应该为测试设置一个固定的坐标。
我已经在我的物理设备中测试了Inclinometer。当我沿着X轴的方向滑动手机的时候。所有3个值都发生了变化,但只有音调值变化最明显,其余两个值都在错误范围内。
测斜仪传感器指定设备的偏航、俯仰和滚动值,并与关心该设备在空间中的位置的应用程序协同工作。通过加速度计的重力矢量和陀螺仪数据的集成,得到俯仰和滚转。偏航是由磁强计和陀螺仪(类似于罗盘航向)数据建立的。测斜仪以一种易于理解和易懂的方式提供先进的方位数据。当您需要设备定位但不需要操作传感器数据时,请使用测斜仪。
要获得更多信息,您可以参考感应器。
https://stackoverflow.com/questions/45013854
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号