
Three.js中基于局部向量的子网格定位
我需要帮助定位网格到特定的点,根据当地的坐标。我制作了高度为0.1的粉红色圆柱体,以展示我想相互触摸的立方体的局部点。
我还想让cube2成为cube1的孩子,但这暂时不是一个交易的破坏者。
预期结果:立方体与其特定的角接触,并在适当的旋转-粉红色圆柱体应该是像素完美的相互覆盖。
我试着用:
cube2.position.copy(cube_position.clone().add(cube2_position))
cube2.rotation.setFromVector3(cube_rotation.clone().add(cube2_rotation))但这不像预期的那样。我应该使用某种矩阵变换吗?
const scene = new THREE.Scene();
const camera = new THREE.PerspectiveCamera(45, window.innerWidth / window.innerHeight, 1, 1000);
camera.position.set(25, 25, 12);
// setup cubes
var geometry = new THREE.CubeGeometry(6, 6, 6);
var material = new THREE.MeshLambertMaterial({
color: 0x00fff0
});
var cube = new THREE.Mesh(geometry, material);
scene.add(cube);
cube.position.set(0.3, 1, -2);
cube.rotation.set(Math.PI / 3, Math.PI / 2, 1)
var geometry2 = new THREE.CubeGeometry(4, 4, 4);
var material2 = new THREE.MeshLambertMaterial({
color: 0x0fff00
});
var cube2 = new THREE.Mesh(geometry2, material2);
cube.add(cube2);
cube_position = new THREE.Vector3(3, 3, 3)
cube_rotation = new THREE.Vector3(Math.PI / 3, Math.PI / 4, 0)
cube2_position = new THREE.Vector3(2, -2, 2)
cube2_rotation = new THREE.Vector3(Math.PI / 2, Math.PI / 2, 0)
// visualize points
vmat = new THREE.MeshLambertMaterial({
color: 0xFF00FF,
opacity: 0.5,
transparent: true
});
v1 = new THREE.Mesh(new THREE.CylinderGeometry(1, 1, 0.1, 10), vmat);
cube.add(v1)
v1.position.copy(cube_position)
v1.rotation.setFromVector3(cube_rotation)
v2 = new THREE.Mesh(new THREE.CylinderGeometry(1, 1, 0.1, 10), vmat);
cube2.add(v2)
v2.position.copy(cube2_position)
v2.rotation.setFromVector3(cube2_rotation)
// BUG: connect cube with cube2 on specified points
cube2.position.copy(cube_position.clone().add(cube2_position))
cube2.rotation.setFromVector3(cube_rotation.clone().add(cube2_rotation))
// setup rest
var pointLight = new THREE.PointLight(0xFFFFFF);
pointLight.position.x = 10;
pointLight.position.y = 50;
pointLight.position.z = 130;
scene.add(pointLight)
const renderer = new THREE.WebGLRenderer({
antialias: true
});
renderer.setSize(window.innerWidth, window.innerHeight);
renderer.setClearColor(0x20252f);
renderer.setPixelRatio(window.devicePixelRatio);
document.body.appendChild(renderer.domElement);
const controls = new THREE.OrbitControls(camera, renderer.domElement);
animate();
function animate() {
requestAnimationFrame(animate);
render();
}
function render() {
renderer.render(scene, camera);
}<script src="https://ajax.googleapis.com/ajax/libs/jquery/1.2.3/jquery.min.js"></script>
<script src="https://cdnjs.cloudflare.com/ajax/libs/three.js/r82/three.js"></script>
<script src="https://yume.human-interactive.org/examples/buffer-geometry/OrbitControls.js"></script>
回答 1
Stack Overflow用户
发布于 2017-07-07 10:40:09
因此,矩阵对于解决旋转问题是非常有效的。我用两个步骤来正确地设置cube2旋转和位置。
- 旋转
cube1、cube2、v1、v2之间的关系是:
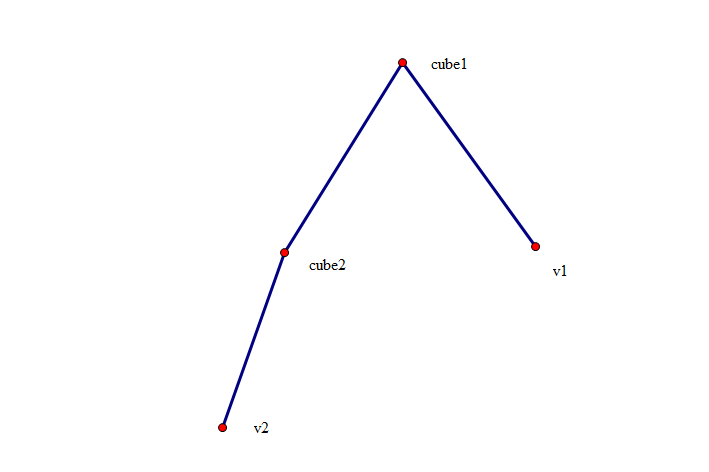
我们想要的是v2世界旋转等于v1相反的世界旋转。当两个物体具有相同的旋转时,它们具有相同的旋转矩阵(世界矩阵)。我们有以下公式:
V1相反。w= V2.w V1相反。l* C1.w = V2.l * C2.l * C1.l V1相反。l= V2.l * C2.l C2.l =V1相反。
其中V1相反世界矩阵,V2.w是v2世界矩阵,C是cube,V2.l(-1)是v2局部矩阵的逆矩阵。现在,我们可以计算cube2旋转矩阵。
- 位置
我们需要的是使
v1和v2在世界上的地位保持一致。下面是一个显示坐标空间的图表:
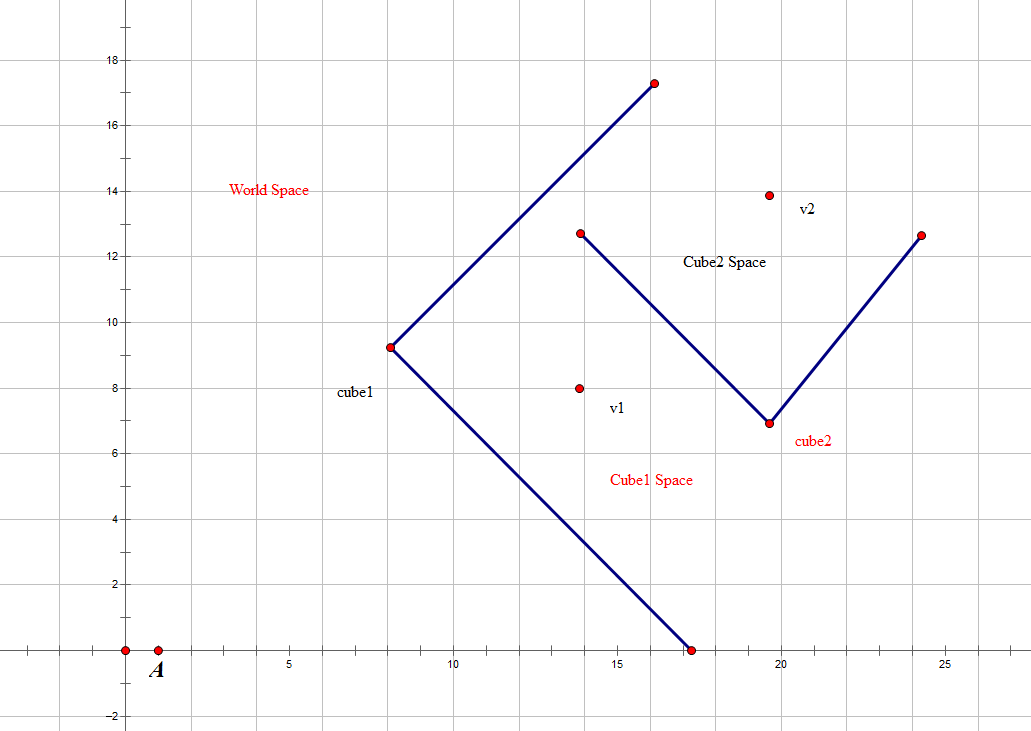
因为v2是cube2的孩子,所以我们需要移动cube2。在世界空间中,我们应该将cube2从v2到v1的一段距离转换,现在我们得到cube2的世界位置,cube2是cube1的一个子项,只需应用cube1的逆矩阵就可以得到cube2的局部位置。
这里是一个jsfiddle 示例。
希望能帮上忙。
更新
我编写了一个函数,您可以不用v1和v2使用它。
//connect obj1 and obj2 on obj1's point1 and obj2's point2.
function connect(obj1,obj2,point1,point2)
{
var point1World = new THREE.Vector3().copy(point1).applyMatrix4(obj1.matrixWorld);
var point2World = new THREE.Vector3().copy(point2).applyMatrix4(obj2.matrixWorld);
var translation = new THREE.Vector3().subVectors(point1World,point2World);
var obj2World = new THREE.Vector3().copy(obj2.getWorldPosition());
obj2World.add(translation);
if(obj2.parent !== null)
{
var inverseMatrix = new THREE.Matrix4().getInverse(obj2.parent.matrixWorld);
obj2World.applyMatrix4(inverseMatrix);
}
obj2.position.copy(obj2World);
}我还添加了一个包含cube1和cube2的祖父多维数据集。小提琴
https://stackoverflow.com/questions/44950463
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号