
在图像中提取激光线(使用OpenCV)
我有一张激光线的图片,我想从图像中提取出这条线。

由于激光线是红色的,我取图像的红色通道,然后搜索每一行中最高的强度:
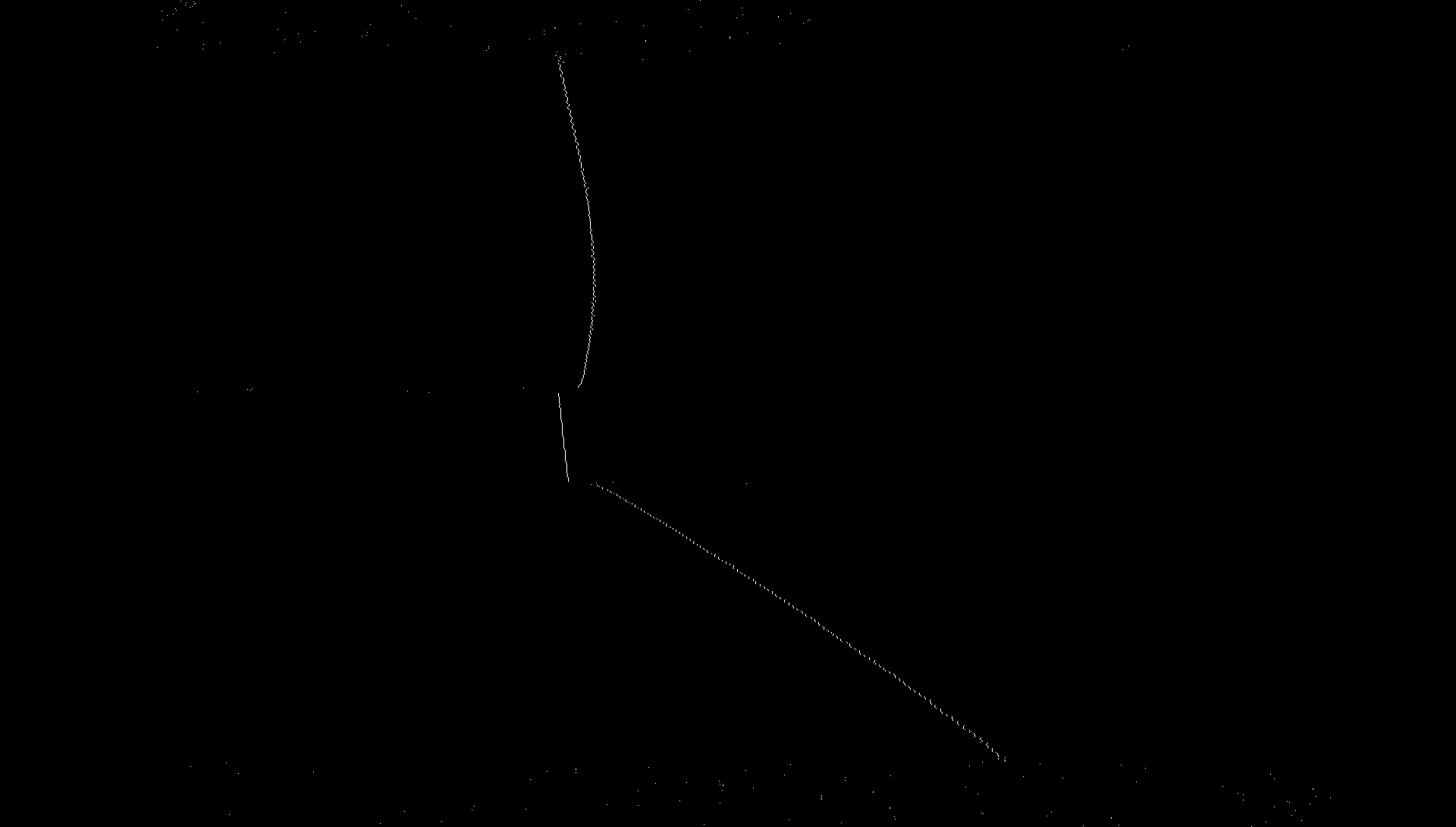
现在的问题是,也有一些点不属于激光线(如果你放大到第二张图片,你可以看到这些点)。
有没有人对接下来的步骤有一个想法(删除单个点,同时提取线条)?
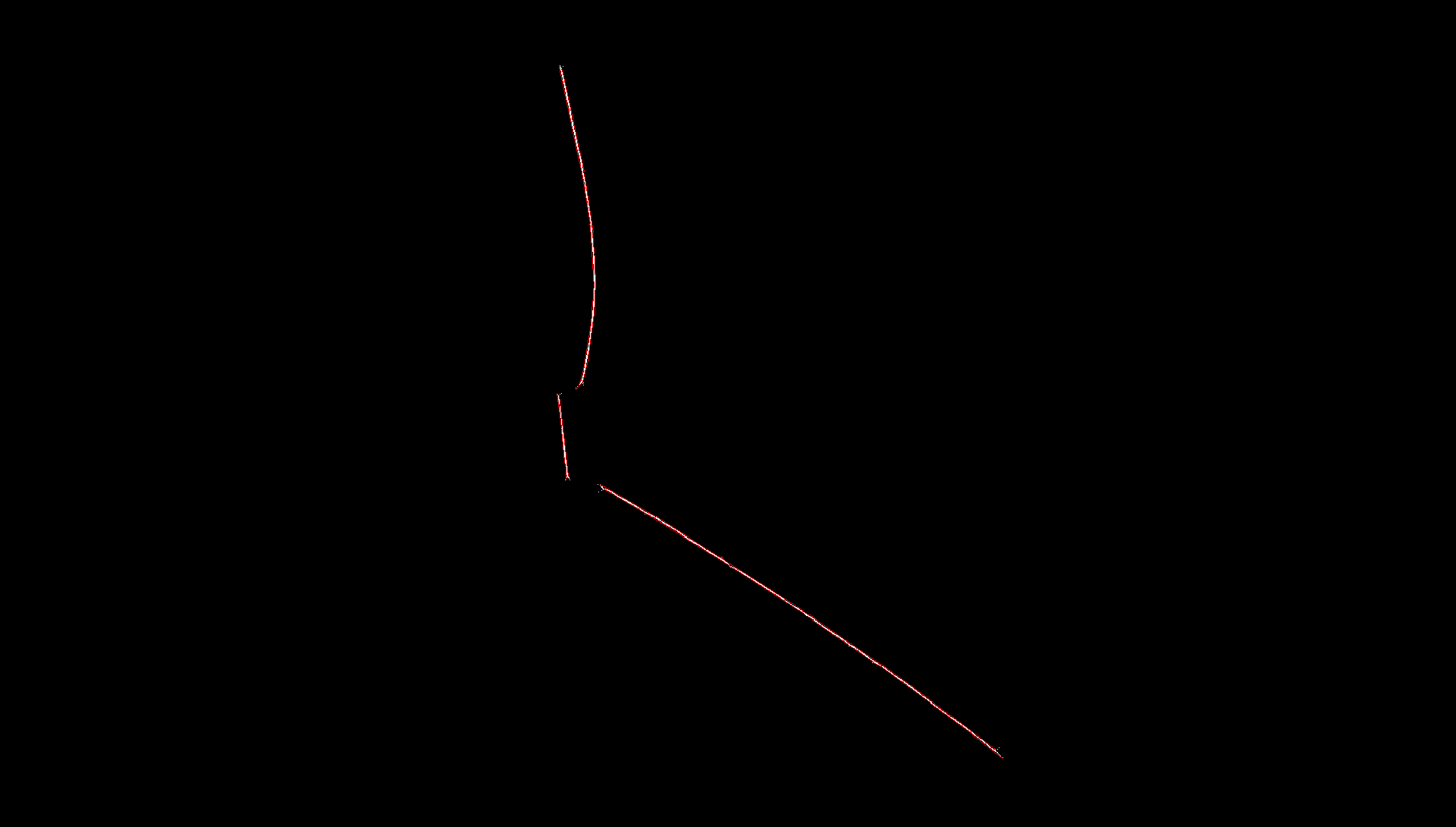
这是另一种检测直线的方法:首先,我用内核模糊掉了那条“黑白”线,然后我细化了(骨架)那条模糊的线,然后我应用了一个OpenCV函数来检测这条线。结果如下图所示:
NEW:
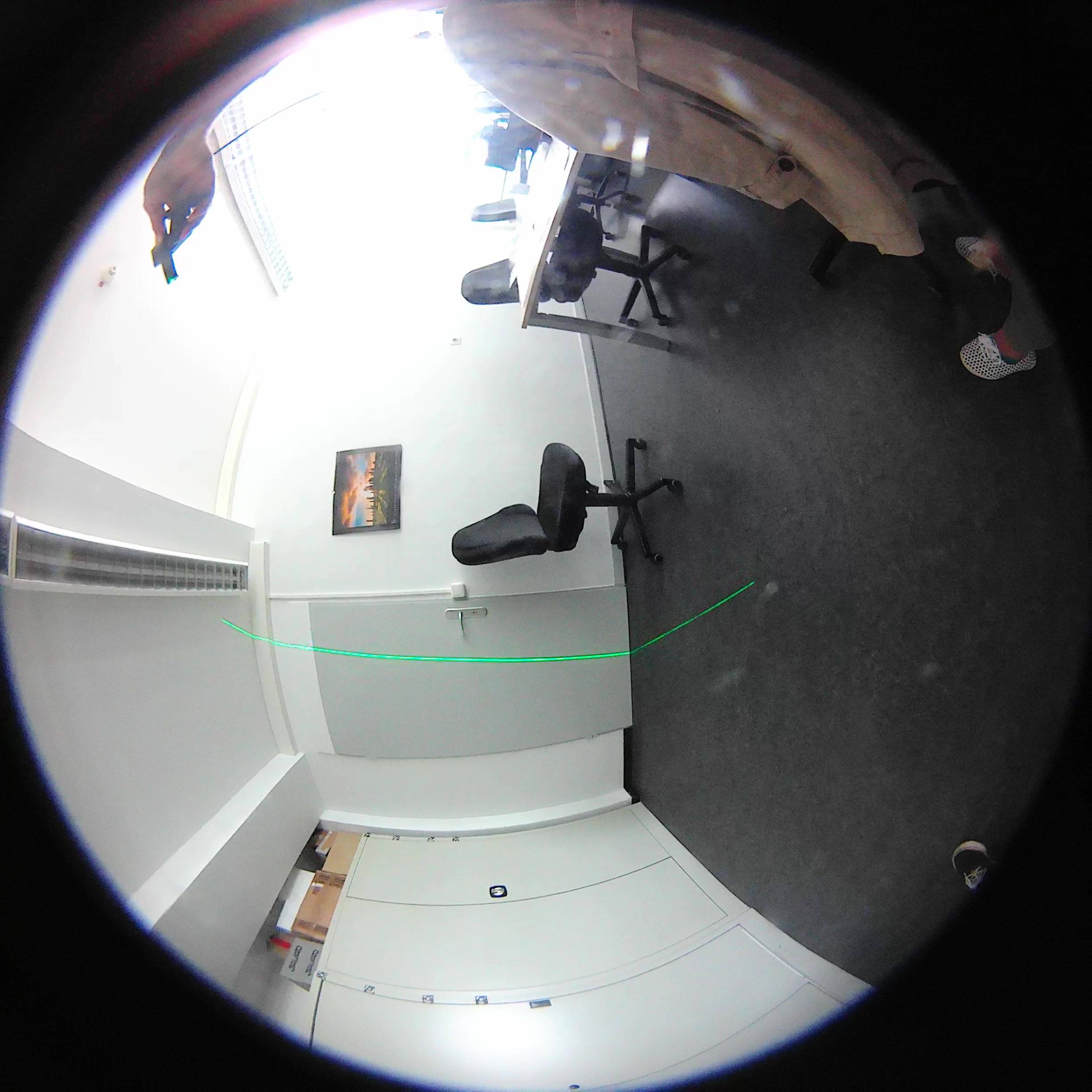
现在我又遇到了更困难的情况。我得提取一个绿色的激光。
这里的问题是激光线的颜色范围更宽,而且变化很大。
在激光线的某些部分,像素只有高绿色分量,而在其他部分,像素也有高蓝色分量。
回答 2
Stack Overflow用户
发布于 2017-06-06 12:27:11
我真的很抱歉,简短的答案没有任何代码,但我建议你采取轮廓,并处理他们。
我不知道你到底需要什么,所以这里有两种方法:
- 尽可能多地在单线上收集等高线(使用中心,尝试用最小的平均值找到直线)。
- 作为第一条路,但试着把分隔线结合起来.这要难得多,但这可能会给你提供几乎完整的激光线从图像。
--
你的照片的一些例子:
import cv2
import numpy as np
import math
img = cv2.imread('image.png')
hsv = cv2.cvtColor(img, cv2.COLOR_RGB2HSV)
# filtering red area of hue
redHueArea = 15
redRange = ((hsv[:, :, 0] + 360 + redHueArea) % 360)
hsv[np.where((2 * redHueArea) > redRange)] = [0, 0, 0]
# filtering by saturation
hsv[np.where(hsv[:, :, 1] < 95)] = [0, 0, 0]
# convert to rgb
rgb = cv2.cvtColor(hsv, cv2.COLOR_HSV2RGB)
# select only red grayscaled channel with low threshold
gray = cv2.cvtColor(rgb, cv2.COLOR_RGB2GRAY)
gray = cv2.threshold(gray, 15, 255, cv2.THRESH_BINARY)[1]
# contours processing
(_, contours, _) = cv2.findContours(gray.copy(), cv2.RETR_LIST, 1)
for c in contours:
area = cv2.contourArea(c)
if area < 8: continue
epsilon = 0.1 * cv2.arcLength(c, True) # tricky smoothing to a single line
approx = cv2.approxPolyDP(c, epsilon, True)
cv2.drawContours(img, [approx], -1, [255, 255, 255], -1)
cv2.imshow('result', img)
cv2.waitKey(0)在您的情况下,这是完美的工作,但正如我已经说过,您将需要做更多的工作与轮廓。

Stack Overflow用户
发布于 2017-06-06 12:33:33
获取每一行中的最高值将始终输出一个值,而不是忽略值不够高的情况。也可以考虑使用阈值,这样就可以丢弃那些不够高的阈值。
然而,这并不是一个非常有效的方法来做到这一点。一个更好更容易的解决方案是使用OpenCV函数inRange();在所有三个通道中为红色定义一个下界和上界,这将返回图像强度在该BGR范围内的白色像素的二值图像。
这是python中的,但是它可以完成这项工作,应该很容易看到如何使用这个函数:
import cv2
import numpy as np
img = cv2.imread('image.png')
lowerb = np.array([0, 0, 120])
upperb = np.array([100, 100, 255])
red_line = cv2.inRange(img, lowerb, upperb)
cv2.imshow('red', red_line)
cv2.waitKey(0)这将产生输出:
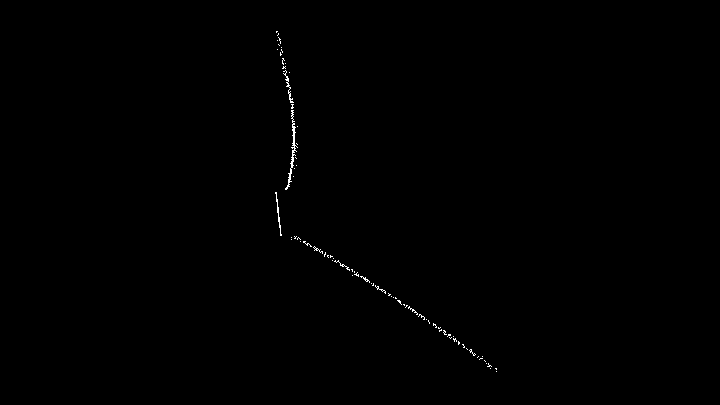
这可以通过找到等高线或其他方法来进一步处理,从而将点转化为一条很好的曲线。
https://stackoverflow.com/questions/44389702
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号