
为什么promela模型超时了?
为什么promela模型超时了?
提问于 2017-04-06 00:27:18
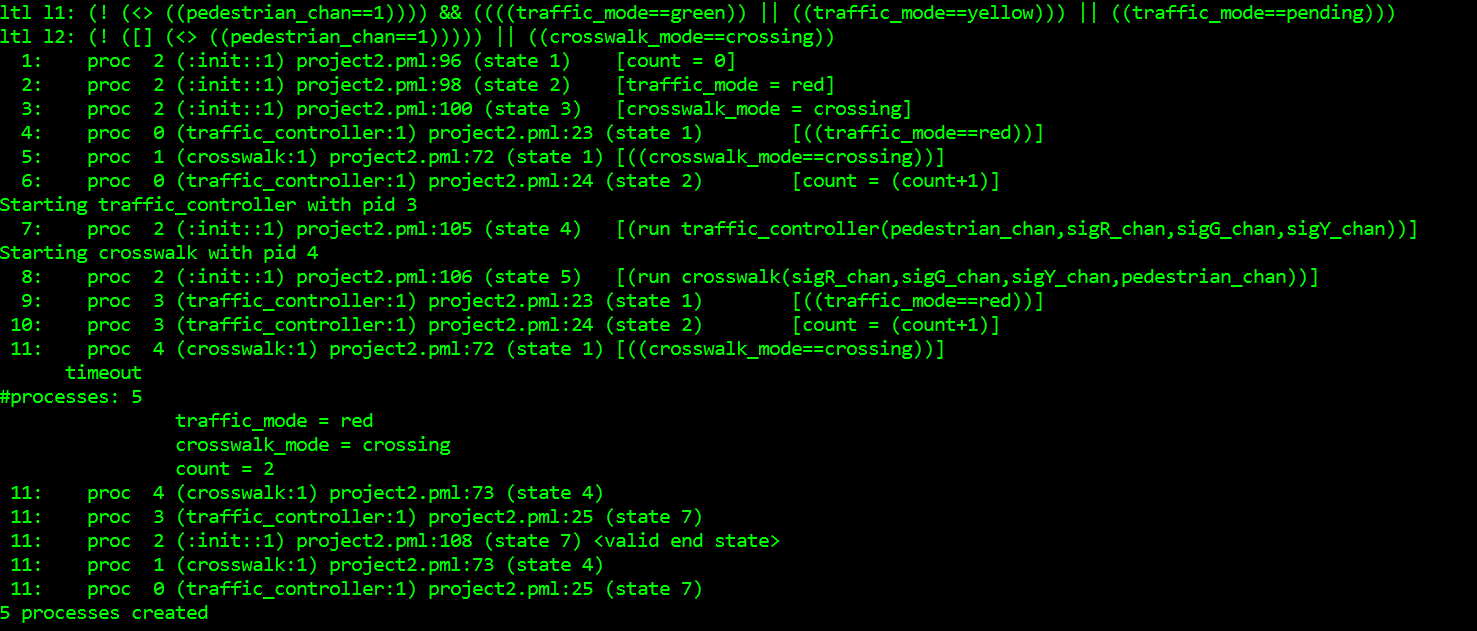
我正在研究一个promela模型,它非常简单。它使用两个不同的模块,充当人行横道/交通灯。第一个模块是输出当前信号的交通灯(绿色、红色、黄色、挂起)。该模块还接收一个称为“行人”的信号作为输入,该信号作为一个指示符,表示有行人想要过马路。第二个模块充当人行横道。它接收来自交通灯模块(绿色、黄色、绿色)的输出信号。它将行人信号输出到交通灯模块。这个模块简单地定义了行人是否在过路、等待或不存在。我的问题是,在运行模型的旋转,它超时,一旦人行横道开始脚趾执行其最初的几个语句。我已经附加了从命令行接收到的跟踪的图像。我对Spin和Promela完全陌生,所以我不完全确定如何使用跟踪中的信息来在代码中找到我的问题。任何帮助都是非常感谢的。
以下是完整模型的代码:
mtype = {red, green, yellow, pending, none, crossing, waiting};
mtype traffic_mode;
mtype crosswalk_mode;
byte count;
chan pedestrian_chan = [0] of {byte};
chan sigR_chan = [0] of {byte};
chan sigG_chan = [0] of {byte};
chan sigY_chan = [0] of {byte};
ltl l1 {!<> (pedestrian_chan[0] == 1) && (traffic_mode == green || traffic_mode == yellow || traffic_mode == pending)}
ltl l2 {[]<> (pedestrian_chan[0] == 1) -> crosswalk_mode == crossing }
active proctype traffic_controller(chan pedestrian_in, sigR_out, sigG_out, sigY_out)
{
do
::if
::(traffic_mode == red) ->
count = count + 1;
if
::(count >= 60) ->
sigG_out ! 1;
count = 0;
traffic_mode = green;
fi
::(traffic_mode == green) ->
if
::(count < 60) ->
count = count + 1;
traffic_mode = green;
::(pedestrian_in == 1 & count < 60) ->
count = count + 1;
traffic_mode = pending;
::(pedestrian_in == 1 & count >= 60)
count = 0;
traffic_mode = yellow;
fi
::(traffic_mode == pending) ->
count = count + 1;
traffic_mode = pending;
if
::(count >= 60) ->
sigY_out ! 1;
count = 0;
traffic_mode = yellow;
fi
::(traffic_mode == yellow) ->
count = count + 1;
traffic_mode = yellow;
if
::(count >= 5) ->
sigR_out ! 1;
count = 0;
fi
fi
od
}
active proctype crosswalk(chan sigR_in, sigG_in, sigY_in, pedestrian_out)
{
do
::if
::(crosswalk_mode == crossing) ->
if
::(sigG_in == 1) -> crosswalk_mode = none;
fi
::(crosswalk_mode == none) ->
if
:: (1 == 1) -> crosswalk_mode = none;
:: (1 == 1) ->
pedestrian_out ! 1;
crosswalk_mode = waiting;
fi
::(crosswalk_mode == waiting) ->
if
::(sigR_in == 1) -> crosswalk_mode = crossing;
fi
fi
od
}
init
{
count = 0;
traffic_mode = red;
crosswalk_mode = crossing;
atomic
{
run traffic_controller(pedestrian_chan, sigR_chan, sigG_chan, sigY_chan);
run crosswalk(sigR_chan, sigG_chan, sigY_chan, pedestrian_chan);
}
}
[![enter image description here][1]][1]
回答 1
Stack Overflow用户
回答已采纳
发布于 2017-04-06 09:02:41
这个问题很容易发现,系统会被困在下面的代码中:
if
::(count >= 60) ->
sigG_out ! 1;
count = 0;
traffic_mode = green;
fi如果count不大于或等于60,会发生什么情况?
进程不能执行(仅)分支,因为条件是false,所以两个都停在那里,等待它在将来的某个时候变成true。
您应该提供一个像else -> skip这样的替代分支,这样流程就可以简单地通过if ... fi语句。
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/43243727
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号