
DICOM:如何重采样不同来源的多模态数据?
DICOM:如何重采样不同来源的多模态数据?
提问于 2017-03-07 19:33:58
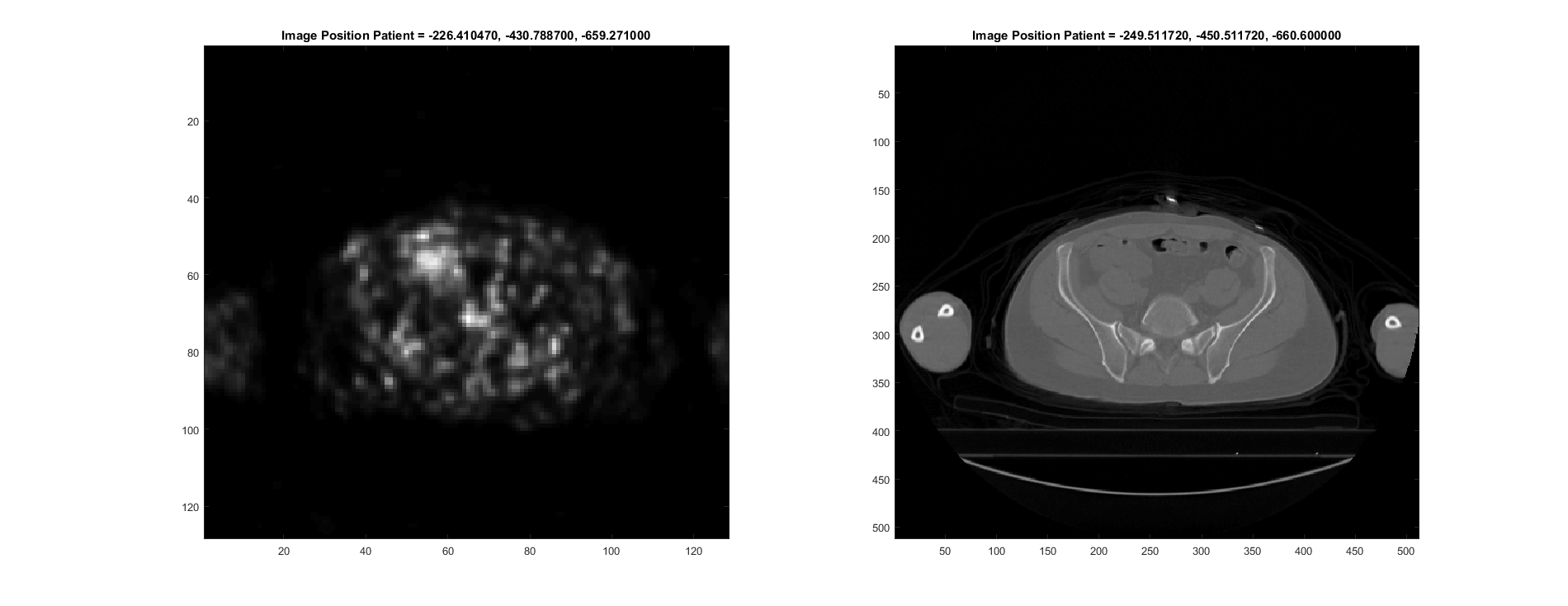
我有2套DICOM图像数据为一个主题,包括PET扫描和CT扫描是同时进行的。参考UID的框架是不同的,我认为这意味着它们的参考来源是不同的。这样就无法比较“图像位置病人”标签。
我想做的是重新整理这两幅图像,这样它们的空间尺寸是相等的,它们的像素尺寸是相等的。任务似乎相对简单,但事实上他们的起源是不同的。
回答 1
Stack Overflow用户
回答已采纳
发布于 2017-03-09 04:21:26
- 对于被认为代表同一物体的任意两幅图像A和B,配准是为A中的每个像素/地标识别B中的等效像素/地标的行为。
- 假设A和B中的每个像素都可以嵌入到一个坐标系中,注册通常需要转换A,这样在转换后,A中每个像素的坐标与B中等效像素的坐标一致(也就是说,目标是两个对象在该坐标空间中重叠)
- 等距变换是指A中任意两个像素之间的距离和B中等效的两个像素之间的距离在应用转换后不发生变化的变换。例如,空间旋转、反射(即镜像)和平移(即将物体移向特定方向)都是等距变换。只使用等距变换的配准算法被认为是刚性的。
- 仿射变换类似于等距变换,但也可能涉及缩放(即物体也可以在尺寸上增长或缩小)。
- 在医学成像中,如果A和B是在不同的时间获得的,很不可能是简单的仿射或等距变换。例如,在A扫描时,病人的手臂被放在一边,而在扫描B时,病人的手臂放在头上。没有硬性的A注册会导致与B完美重叠,因为等效点之间的距离已经改变(例如,头到手之间的距离,以及在每种情况下的手到脚之间的距离)。因此,需要使用更精细的非刚性配准算法。
- 在您的例子中,A和B是在同一台机器的同一扫描会话中获得的,这意味着这是一个合理的假设,即转换将是一个简单的仿射转换。也就是说,你可能只需要稍微旋转和平移物体;如果A的坐标系比B“密度”大,你也可能需要对它进行一点生长/缩小。但这就是,没有奇怪的‘翘曲’将是必要的补偿‘运动’之间的扫描A和B之间正在获得,因为它们发生在同一时间。
- 表示3D空间中的“大小和方向”的三维矢量可以使用3x3变换矩阵T转换成另一个3D矢量。例如,如果应用转换,则可以将其转换为另一个3D矢量。
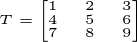
转矢量

(使用矩阵乘法),得到的向量u是

。换句话说,“新”x坐标以转换矩阵指定的方式依赖于旧的x、y和z坐标,对于新的y和新z坐标也是如此。
- 如果同时将3x3变换T应用于三个向量,则会得到三个转换向量。例如,对于
v = [v1, v2, v3],v1 = [1; 2; 3], v2 = [2; 3; 4], v3 = [3; 4; 5],T*v会给出一个3x3矩阵u,其中每一列对应于x,y,z坐标的转换向量。 - 现在,考虑变换矩阵T是未知的,我们想要发现它。假设我们有一个已知的观点

我们知道,在这个转变之后,它变成了一个已知的点

。我们有:

考虑最上面的行;即使您知道p和p',很明显,您不能从单个点确定a、b和c。你有三个未知数,只有一个方程。因此,要求解a、b和c,至少需要一个由三个方程组成的系统。另外两行也是如此。因此,要找到变换矩阵T,需要三个已知的点(变换前后)。
- 在matlab中,您可以通过输入
T*v = u来求解这样的方程组。对于3x3变换矩阵T,u和v至少需要包含3个向量,但它们可以包含更多的向量(即方程组被过度表示)。你传递的向量越多,从数值的角度看,变换矩阵就越精确。但理论上你只需要三个。 - 如果您的转换还涉及一个翻译元素,那么您需要完成在您发布的图像中描述的技巧。也就是说,你把一个三维向量x,y,z表示为齐次坐标向量x,y,z,1。这使你能够在变换矩阵中添加第4列,从而对每个点都产生一个“平移”,即在新的x',y‘和z’系数中增加一个额外的值,它独立于输入向量。由于翻译系数也是未知的,你现在有12而不是9个未知数,因此你需要4点来解决这个系统。即

概括如下:
若要将图像A转换为与B占据相同的空间,请将A的坐标解释为与B位于同一坐标系中,在两者中找出四个等价的地标,并使用/右矩阵除法算子求解这个方程组,得到一个合适的变换矩阵。然后,您可以使用您找到的转换矩阵T,将A中的所有坐标(表示为齐次坐标)转换为新的坐标。
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/42656799
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号