
Kd缺陷K近邻
免责声明:下面的代码中有一些不好的做法
你好,我只是有几个问题,如何正确格式化我的KD树K最近的邻居搜索。这里是我的函数的一个例子。
void nearest_neighbor(Node *T, int K) {
if (T == NULL) return;
nearest_neighbor(T->left, K);
//do stuff find dist etc
if(?)nearest_neighbor(T->right, K);
}这段代码很混乱,所以我会尝试解释它。我的函数只取k值和一个节点T。我要做的是找出当前节点与结构中所有其他值之间的距离。所有这些都很有效,我的问题是理解何时以及如何调用递归调用nearest_neighbor(T->左/T->右,K) --我知道我应该把调用修剪到右边,但我不知道如何做到这一点。顺便说一下,这是一棵多维KD树。对更好的例子提供任何指导将是非常感谢的。
回答 2
Stack Overflow用户
发布于 2016-11-17 22:09:47
我建议你像维基百科说的那样实现,对于你的具体问题,这里:
从根节点开始,算法递归地向下移动,就像插入搜索点时一样(即,它向左或向右移动,取决于该点在拆分维度中是否小于或大于当前节点)。
回答问题。当然,您可以将此图像记在心上:
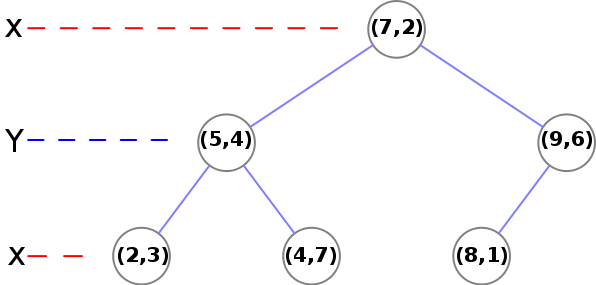
如果你有更多的两个维度,比如在这个例子中,你只是在第一个维度中分裂,然后在第二个,第三个,然后第四个等等,然后你遵循一个循环策略,所以当你到达最后一个维度时,你再次从第一个维度开始。
Stack Overflow用户
发布于 2016-11-18 04:56:34
一般的想法是保持全局点离目标最近,用新发现的点进行更新,永远不要降到不可能包含比目标最近的点更近的n个顶点中。我将用C而不是C++展示它。您可以轻松地转换为面向对象的形式。
#define N_DIM <k for the k-D tree>
typedef float COORD;
typedef struct point_s {
COORD x[N_DIM];
} POINT;
typedef struct node_s {
struct node_s *lft, *rgt;
POINT p[1];
} NODE;
POINT target[1]; // target for nearest search
POINT nearest[1]; // nearest found so far
POINT b0[1], b1[1]; // search bounding box
bool prune_search() {
// Return true if no point in the bounding box [b0..b1] is closer
// to the target than than the current value of nearest.
}
void search(NODE *node, int dim);
void search_lft(NODE *node, int dim) {
if (!node->lft) return;
COORD save = b1->p->x[dim];
b1->p->x[dim] = node->p->x[dim];
if (!prune_search()) search(node->lft, (dim + 1) % N_DIM);
b1->p->x[dim] = save;
}
void search_rgt(NODE *node, int dim) {
if (!node->rgt) return;
COORD save = b0->p->x[dim];
b0->p->x[dim] = node->p->x[dim];
if (!prune_search()) search(node->rgt, (dim + 1) % N_DIM);
b0->p->x[dim] = save;
}
void search(NODE *node, int dim) {
if (dist(node->p, target) < dist(nearest, target)) *nearest = *node->p;
if (target->p->x[dim] < node->p->x[dim]) {
search_lft(node, dim);
search_rgt(node, dim);
} else {
search_rgt(node, dim);
search_lft(node, dim);
}
}
/** Set *nst to the point in the given kd-tree nearest to tgt. */
void get_nearest(POINT *nst, POINT *tgt, NODE *root) {
*b0 = POINT_AT_NEGATIVE_INFINITY;
*b1 = POINT_AT_POSITIVE_INFINITY;
*target = *tgt;
*nearest = *root->p;
search(root, 0);
*nst = *nearest;
}注意,这不是最经济的实现。为了简单起见,它做了一些不必要的最近的更新和剪枝比较。但其渐近性能与kd-树神经网络的期望一致.在完成这个操作之后,您可以使用它作为一个基本实现来挤出额外的比较。
https://stackoverflow.com/questions/40645895
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号