
理解Tango和PCL项目中的坐标系统、旋转和平移
理解Tango和PCL项目中的坐标系统、旋转和平移
提问于 2016-10-29 22:00:01
我使用Project获取深度数据,然后将3d点云发送到本地类,使用pcl库处理数据。我有几个问题,我认为它们将帮助我更多地理解旋转,平移和坐标系统在pcl和探戈。此外,他们将帮助我解决我的问题,在我正在进行的项目。
- 我在一个应该实时工作的障碍检测系统中工作,我使用的是探戈中的默认坐标系统?是这样吗?我不应该使用区域描述坐标框架吗?
- 在我目前的场景中,我将获取相机参考框架中的3D云数据,并在不改变参照系的情况下处理它们。我有三个相关的问题:
- Is it alright to work directly on the data while it in the camera frame?
- Since I use PCL for processing, what is the coordinate system in pcl are the x point to the right, y point to the bottom, and z forward from the camera as in the camera coordinate system of Tango?
- Is transforming the cloud to the start of device is transforming to the origin (world frame)?
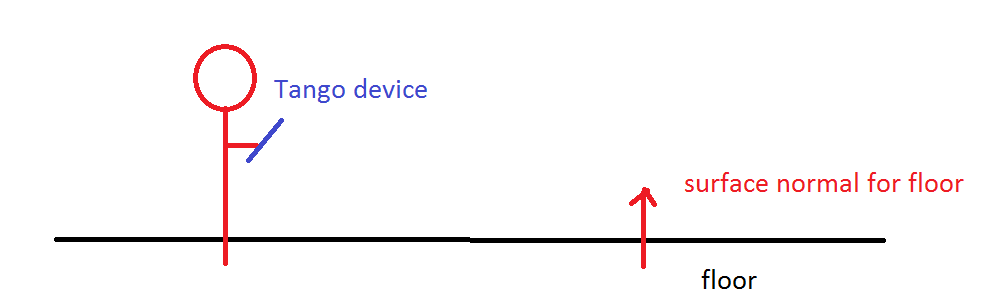
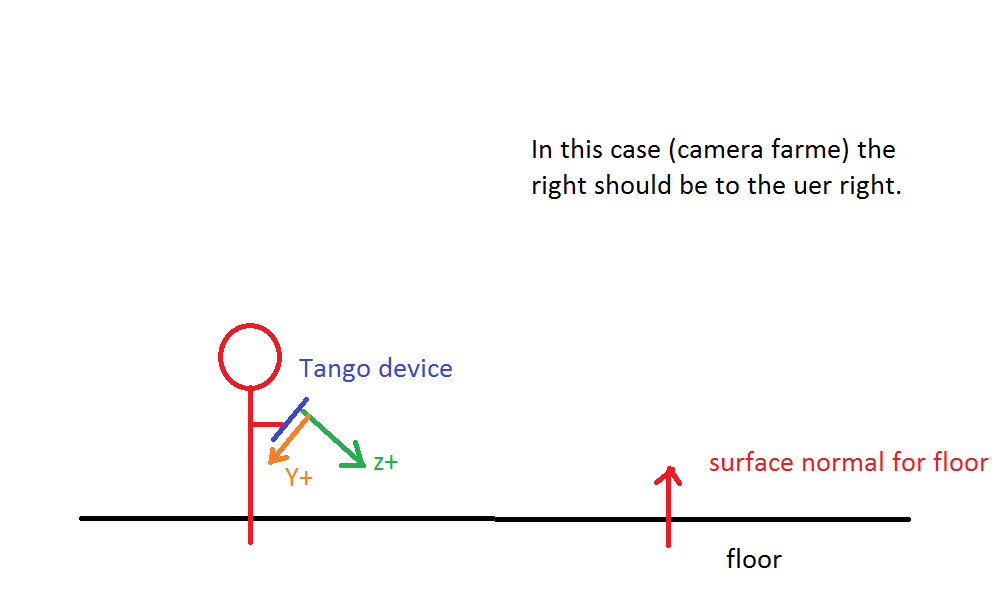
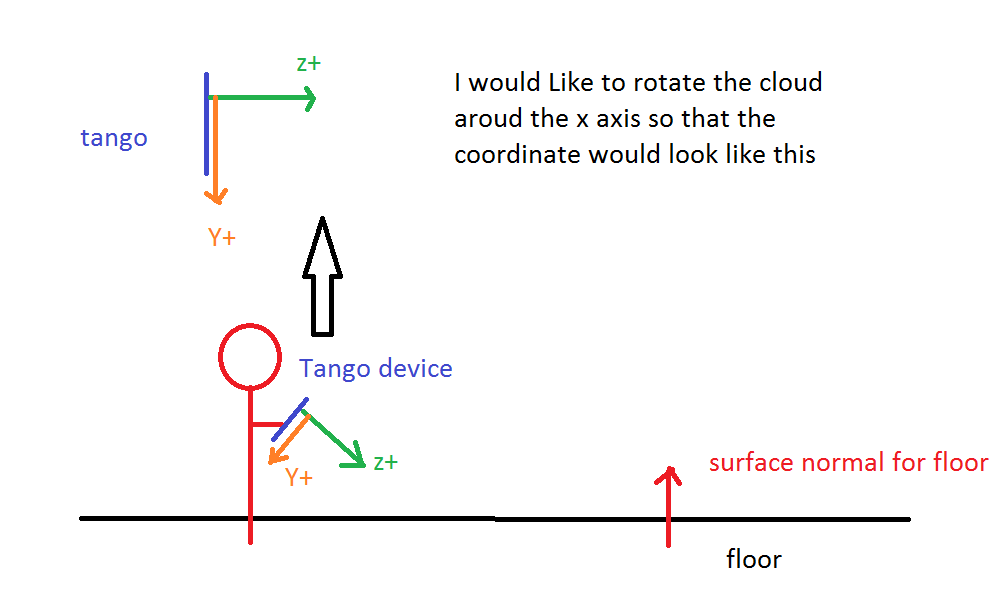
- 在我的项目中,用户应该将设备保持在X轴旋转的程度上,我从其他张贴的问题中读到,俯仰/滚转/偏航不是获得设备旋转的可靠方法,我必须使用探戈提供的姿态数据,对吗?如何确定设备的正确旋转角度,使我可以旋转云层,以确保地面法线将平行于Y轴?(请看一看这些照片,了解我的意思)
- 如何使用位姿数据在pcl中传输和旋转云数据?
注:
我有一个与此相关的公式,它显示了我的三维点云处理代码的结果及其输出:相关问题:如何检测地板帕恩?
谢谢
回答 1
Stack Overflow用户
发布于 2016-11-20 07:13:00
我将对我的问题发表一些答案。
1和2.1 -为了获得更好的结果,地板法线角度,我最好的坐标工作是OpenGL世界坐标。
2.2-请参阅本链接中的答案:应答链接(pcl论坛)
- 对于旋转和平移,我使用了探戈装置的姿态数据,我读到它们比获得设备本身的旋转要好。因此,我得到的姿态数据同时与点云,然后我把它们发送到本机代码,并执行翻译使用PCL库。
希望这对某人有帮助。
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/40324107
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号