
附加多幅图像全景图以形成完整的全景图
附加多幅图像全景图以形成完整的全景图
提问于 2016-09-07 12:04:56
我正在使用opencv缝纫机代码。在stitcher.cpp中,存在最大分量函数,其中最大集的图像属于全景图,所有其他图像都被拒绝。我已经更改了代码,并能够获得较少的小集合和最大的集合。现在,为了将这些小集合与最大集合并,我必须在较小的集合中找到每幅图像相对于最大集的中心图像的相对旋转。
假设我有6幅图像,得到两组图像。Set1 ( 1,2,3,4 )和Set2( 5 ,6)我知道1,2,3,4 wrt 3(set1中心)的旋转,6 wrt 5的旋转。我使用陀螺仪,所以我也有5 wrt到3的旋转。
因此,R为6 wrt 3,R= R6 wrt 5* R5 wrt 1
这是正确的吗?
输出
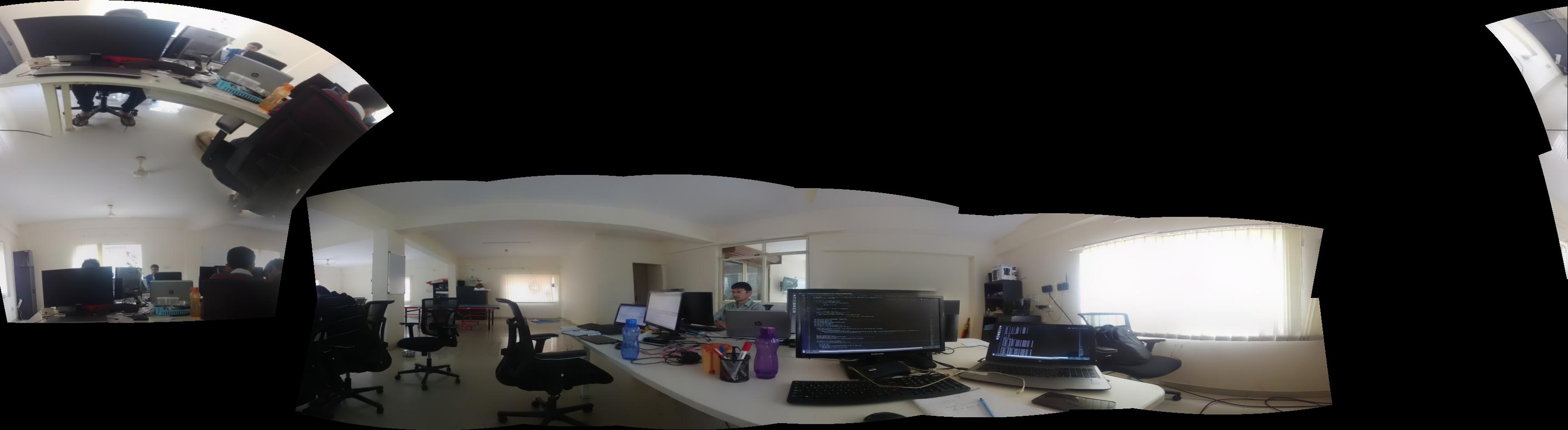
中心的全景图是最大的一组。当那个左角是小集合的时候,我使用了上面的公式,输出是错误的。
回答 1
Stack Overflow用户
回答已采纳
发布于 2016-09-16 05:51:00
这是6 wrt 3的解R= R5 wrt 1* R6 wrt 5
如果你的陀螺仪数据是reliable.Although的话,这会产生很好的效果,结果并不总是完美的,这取决于从缝合阿尔戈和手机传感器数据中计算出的焦距。
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/39369485
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号