
用voronoi搜索路径
用voronoi搜索路径
提问于 2016-07-04 12:28:02
我的大学项目已经到了死胡同,我找不到解决的办法。问题是:
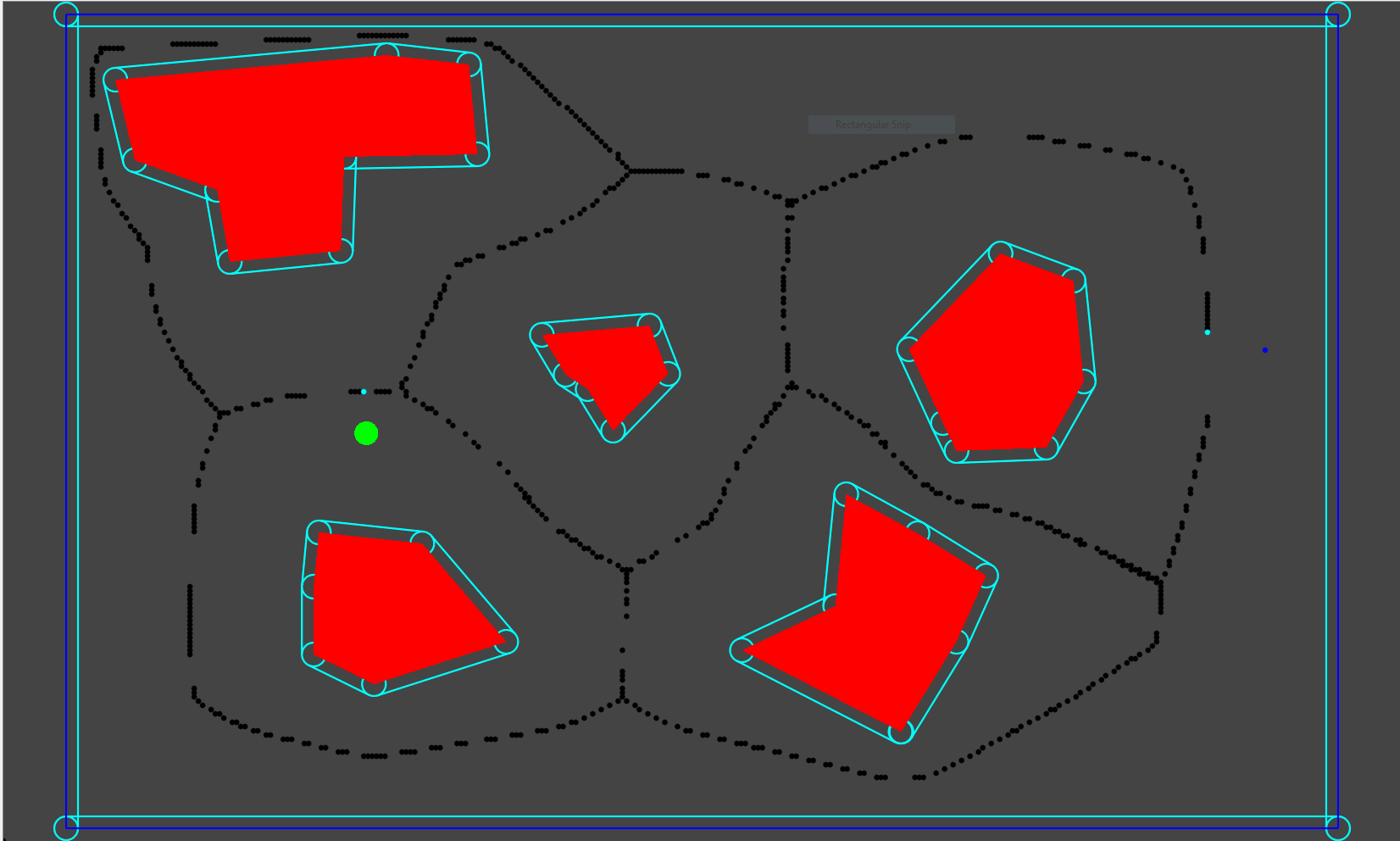
给出了半径为r的圆形机器人(绿色圆),我需要找到一条到达终点的路径(任何路径都不是最佳路径),即蓝点。。
图像在下面
- 障碍物是红色的多边形,周围的青色线代表Minkowski和。
- 黑点代表voronoi图。
- 周围的蓝色盒子是外面的边框。
所以首先,我认为我应该找到更接近开始点(机器人)和voronoi图点的终点。这些点在图像中显示(青色点)。
然后我想用一些算法之王,比如A*,寻找沿着voronoi点在上面发现的青色点的路径,这样我就可以找到最安全的路径了。
问题是,我没有办法知道哪个是voronoi图中每个点的近邻。因为正如你在图表的某些部分所看到的,有很大的差距。
那你有什么建议?
谢谢您抽时间见我。
回答 2
Stack Overflow用户
回答已采纳
发布于 2016-07-07 18:52:24
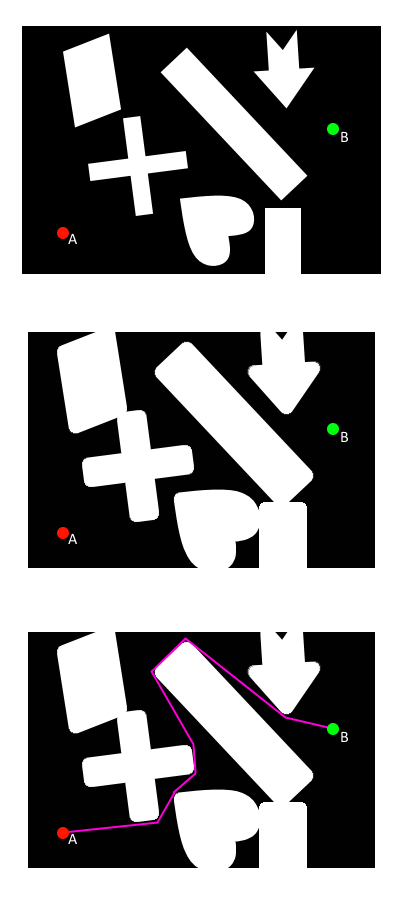
- 创建一个表示地图的黑白图像。一开始应该是黑色的。
- 把你的障碍变成白色。
- 使用圆形过滤器放大你的圆形机器人大小的图像。
- 找到从A到B的最短路径,该路径只遍历黑色像素。
Stack Overflow用户
发布于 2016-07-04 13:08:11
问题是,我没有办法知道哪个是Voronoi图中每个点的近邻。因为正如你在图表的某些部分所看到的,有很大的差距。
也许有更好的解决方案,但这里有一个简单的算法,您可以尝试:
- 查找(或手动设置)“连通”点之间的最长距离,D。
- 在Voronoi图的每一对点之间建立一个距离表,其中的距离小于或等于D。
- 连接所有点,从较短的距离开始,除非路径短于D之间已经存在(以避免不必要的小环和切角)。
- 找到离你的机器人最近的点,离你的目的地最近的地方。
- 在步骤3中构建的图上运行最短路径算法。
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/38184768
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号