
快速/快速RCNN坐标系统
我一直在训练更快的RCNN关于自定义数据集,但有一些反常的结果。随着训练迭代次数的增加,网络对bot验证和训练数据的性能下降。尽管损失在减少,但这是令人惊讶的。目的是探测树叶。
以下分别是200次和165000次迭代时的图像
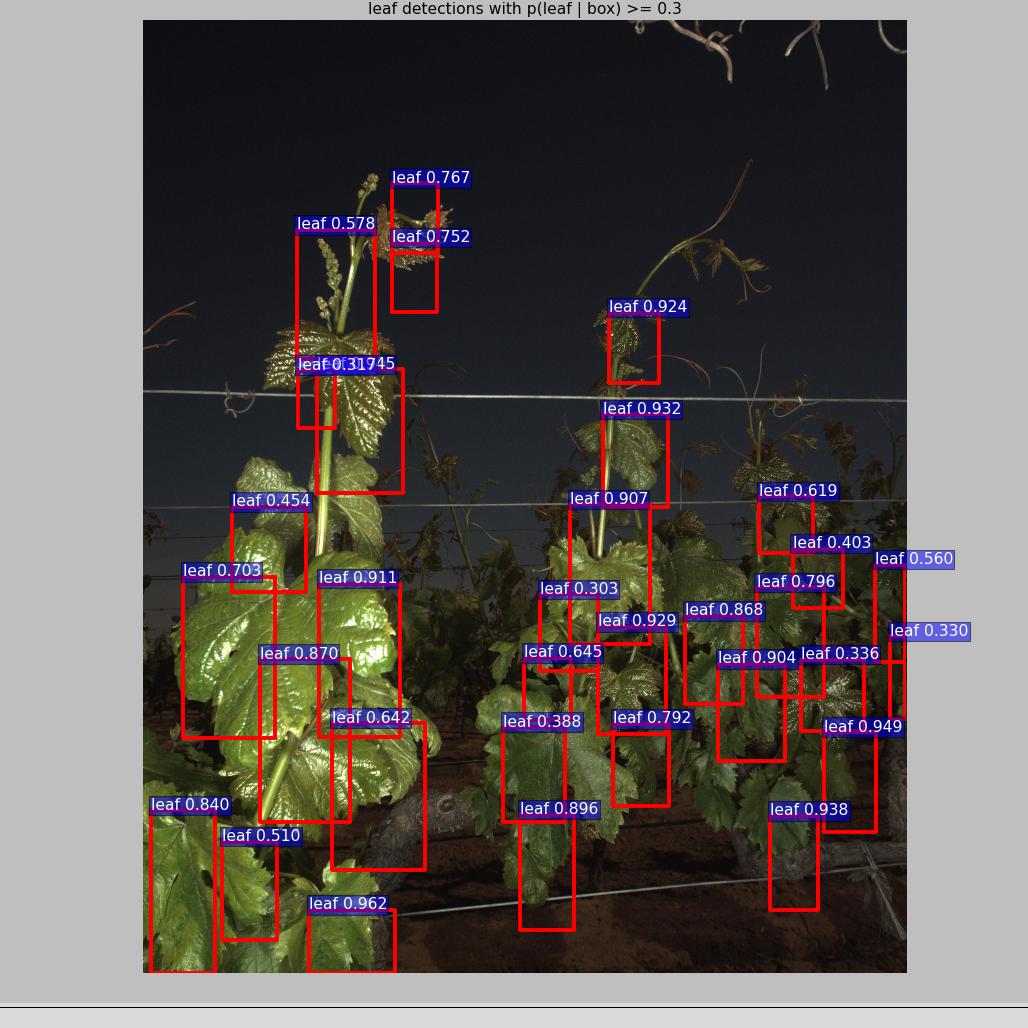
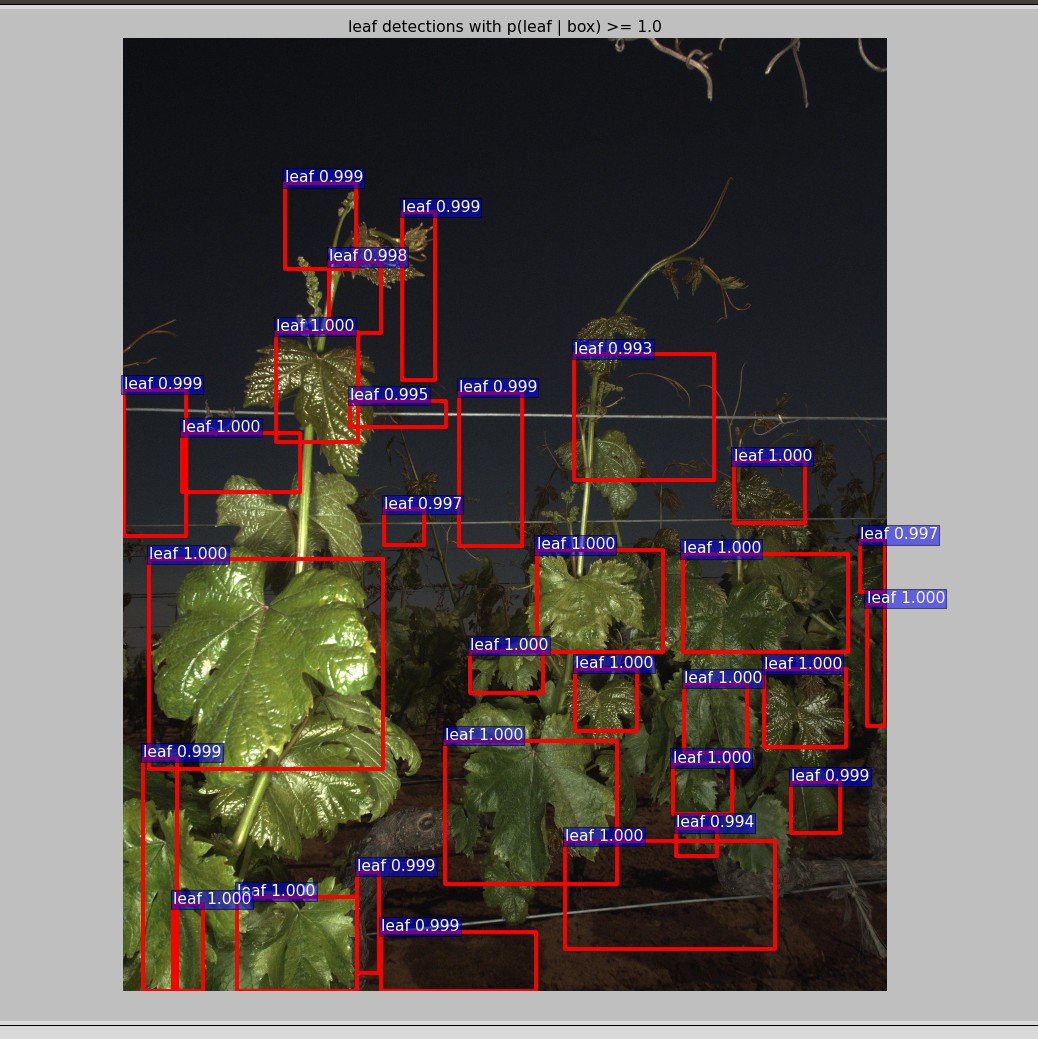
这里要注意的是,经过165000次迭代之后,网络也开始在后台绘制框。
我认为这是因为训练数据注解中的一些错误,因为随着训练的进行,损失在减少。
我创建的注释文件有一个与matlab类似的坐标系,即(0,0)作为图像的左上角,因此对于每个边框,左上角是(x_min,y_min),右下角是is (x_max,y_max)。如果是这样的话,还会有什么问题呢?
回答 1
Stack Overflow用户
发布于 2016-12-04 10:27:58
本文对矩形和锚的编码速度更快,如x_center、y_center、宽度和高度.这也取决于您对锚进行编码的选择。如果您使用了原始出版物中的代码,那么我认为您应该像论文中所描述的那样重构这些框。
对于边界盒回归,我们采用以下4个坐标的参数化: ..。 其中x,y,w和h表示盒子的中心坐标及其宽度和高度。变量x、xa和x∗分别用于预测箱、锚箱和地面真相箱( y、w、h也是如此)。
资料来源:https://arxiv.org/pdf/1506.01497v3第5页。
https://stackoverflow.com/questions/37493161
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号