
从球面上的三维点计算RPY (滚动俯仰偏航)
我需要一种方法来找到一组描述球的位置和方向的齐次变换矩阵。
这个想法是,我在这个球体的中心有一个物体,它的半径是dz。因为我知道物体的三维坐标,所以我知道球体的所有三维坐标。能不能确定球面上任何一点的RPY,这样点总是指向中心的对象吗?
说明:
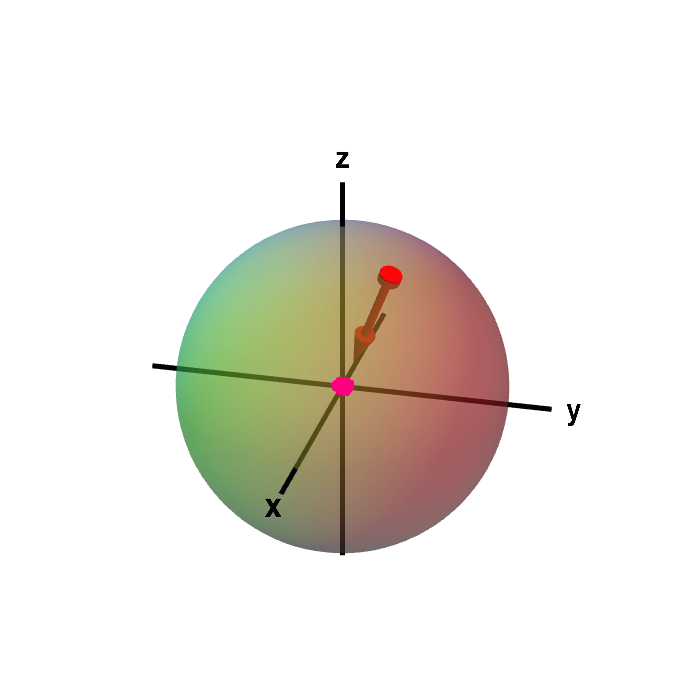
在这个球体的猎户座,我们有一个物体。球体的半径是dz。红点是球体上的一个点,从这个点到物体/猎户座的矢量。
位置应该是相对容易提取的,因为一个球可以用一个函数来描述,但是我如何确定向量,或者旋转矩阵,它指向origo。
回答 2
Stack Overflow用户
发布于 2016-04-22 17:41:01
你可以用球的中心作为原点,计算由原点到球体边缘的直线的单位向量,然后把这个单位向量乘以-1,得到指向球面边缘点的指向球体中心的矢量。
示例:
vec pointToCenter(Point edge, Point origin) {
vec norm = edge - origin;
vec unitVec = norm / vecLength(norm);
return unitVec * -1;
}一旦有了向量,就可以将其转换为RPY的欧拉角,例如here
Stack Overflow用户
发布于 2016-04-22 17:55:37
在我的头顶上,我建议用四元数来定义原点的旋转,相对于你想要的球体表面上的点:
- 在球体表面选择想要的点,比如说北极
- 将这一点转换为原点(假设球体半径已知),使用3D Pythagorus: x_comp^2 + y_comp^2 + z_comp^2 = hypotenuse^2
- 创建一个指向原始表面点的轴的旋转。这将是x,y和z分量的比例倍数,构成低音值。我只想把它做成单元部件。在四元数(q,x,y,z)中捕获产生的轴和旋转,其中x,y,z是轴的分量,q是围绕该轴的旋转。硬码Q到1。您希望使用四元数,因为它将使您由此产生的旋转矩阵更易于使用。
- 将点转换回球体表面,并否定轴的分量值,以得到(q,-x,-y,-z)。
- 这会给你在球体表面的点,一个轴指向原点。以北极为例,球体表面的点(0,radius_length,0)有一个四元数(1,0,-1,0)。请参阅我下面的github存储库中的quatrotation.c,以获得结果的旋转矩阵。
我没有时间为此编写代码,但不久前我在github存储库中编写了一个包含可编译代码示例的小教程,这将使您开始学习:
https://github.com/brownwa/opengl
先做mat_rotation教程,然后再做四元数教程。这是可以在一个周末,一天,如果你是专注的。
https://stackoverflow.com/questions/36798592
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号