
OpenCV3.0: SURF检测和FlannBased匹配器跟踪矩形问题
OpenCV3.0: SURF检测和FlannBased匹配器跟踪矩形问题
提问于 2016-01-12 15:38:46
我正在尝试实现使用FlannBased匹配器的冲浪检测和跟踪。我的代码是正常工作的检测部分,但问题是跟踪。
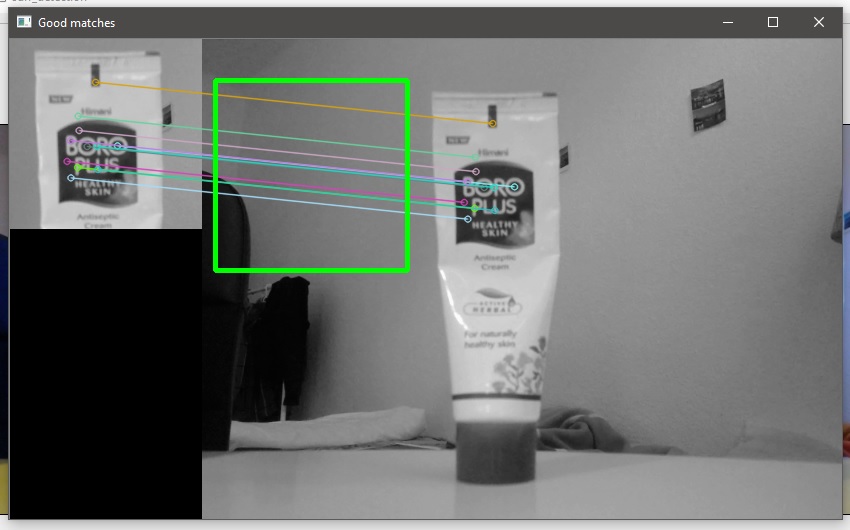
您可以在上面的图像中看到跟踪矩形没有聚焦到正确的对象上。而且,即使我移动相机,矩形也是静止的。我不知道我哪里出了问题。
下面是我实现的代码
void surf_detection::surf_detect(){
UMat img_extractor, snap_extractor;
if (crop_image_.empty())
cv_snapshot.copyTo(dst);
else
crop_image_.copyTo(dst);
//dst = QImagetocv(crop_image_);
imshow("dst", dst);
Ptr<SURF> detector = SURF::create(minHessian);
Ptr<DescriptorExtractor> extractor = SURF::create(minHessian);
cvtColor(dst, src, CV_BGR2GRAY);
cvtColor(frame, gray_image, CV_BGR2GRAY);
detector->detect(src, keypoints_1);
//printf("Object: %d keypoints detected\n", (int)keypoints_1.size());
detector->detect(gray_image, keypoints_2);
//printf("Object: %d keypoints detected\n", (int)keypoints_1.size());
extractor->compute(src, keypoints_1, img_extractor);
// printf("Object: %d descriptors extracted\n", img_extractor.rows);
extractor->compute(gray_image, keypoints_2, snap_extractor);
std::vector<Point2f> scene_corners(4);
std::vector<Point2f> obj_corners(4);
obj_corners[0] = (cvPoint(0, 0));
obj_corners[1] = (cvPoint(src.cols, 0));
obj_corners[2] = (cvPoint(src.cols, src.rows));
obj_corners[3] = (cvPoint(0, src.rows));
vector<DMatch> matches;
matcher.match(img_extractor, snap_extractor, matches);
double max_dist = 0; double min_dist = 100;
//-- Quick calculation of max and min distances between keypoints
for (int i = 0; i < img_extractor.rows; i++)
{
double dist = matches[i].distance;
if (dist < min_dist) min_dist = dist;
if (dist > max_dist) max_dist = dist;
}
//printf("-- Max dist : %f \n", max_dist);
//printf("-- Min dist : %f \n", min_dist);
vector< DMatch > good_matches;
for (int i = 0; i < img_extractor.rows; i++)
{
if (matches[i].distance <= max(2 * min_dist, 0.02))
{
good_matches.push_back(matches[i]);
}
}
UMat img_matches;
drawMatches(src, keypoints_1, gray_image, keypoints_2,
good_matches, img_matches, Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
if (good_matches.size() >= 4){
for (int i = 0; i<good_matches.size(); i++){
//get the keypoints from good matches
obj.push_back(keypoints_1[good_matches[i].queryIdx].pt);
scene.push_back(keypoints_2[good_matches[i].trainIdx].pt);
}
}
H = findHomography(obj, scene, CV_RANSAC);
perspectiveTransform(obj_corners, scene_corners, H);
line(img_matches, scene_corners[0], scene_corners[1], Scalar(0, 255, 0), 4);
line(img_matches, scene_corners[1], scene_corners[2], Scalar(0, 255, 0), 4);
line(img_matches, scene_corners[2], scene_corners[3], Scalar(0, 255, 0), 4);
line(img_matches, scene_corners[3], scene_corners[0], Scalar(0, 255, 0), 4);
imshow("Good matches", img_matches);
}回答 1
Stack Overflow用户
回答已采纳
发布于 2016-01-12 16:28:50
你的火柴是正确的,你只是简单地显示错了。匹配指的是gray_image坐标系,但在img_matches坐标系中显示它们。
因此,基本上,您需要用src宽度来转换它们:
line(img_matches, scene_corners[0] + Point2f(src.cols,0), scene_corners[1] + Point2f(src.cols,0), Scalar(0, 255, 0), 4);
line(img_matches, scene_corners[1] + Point2f(src.cols,0), scene_corners[2] + Point2f(src.cols,0), Scalar(0, 255, 0), 4);
line(img_matches, scene_corners[2] + Point2f(src.cols,0), scene_corners[3] + Point2f(src.cols,0), Scalar(0, 255, 0), 4);
line(img_matches, scene_corners[3] + Point2f(src.cols,0), scene_corners[0] + Point2f(src.cols,0), Scalar(0, 255, 0), 4);另见this相关答案。
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/34747804
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号