
寻找三维曲面的开口
寻找三维曲面的开口
提问于 2015-09-16 12:52:17
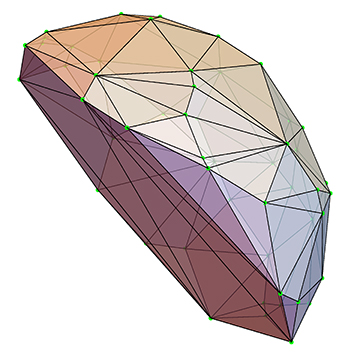
我有一个包含笛卡尔坐标XYZ的数组sphere。每一行都是对象表面的一个点。我想找出那个表面的开口,旋转物体,使x轴指向开口。
我正在使用python和numpy,但是一般的方法和特定的实现一样好。
这是我目前的情况。X轴为红色,原点为绿色:
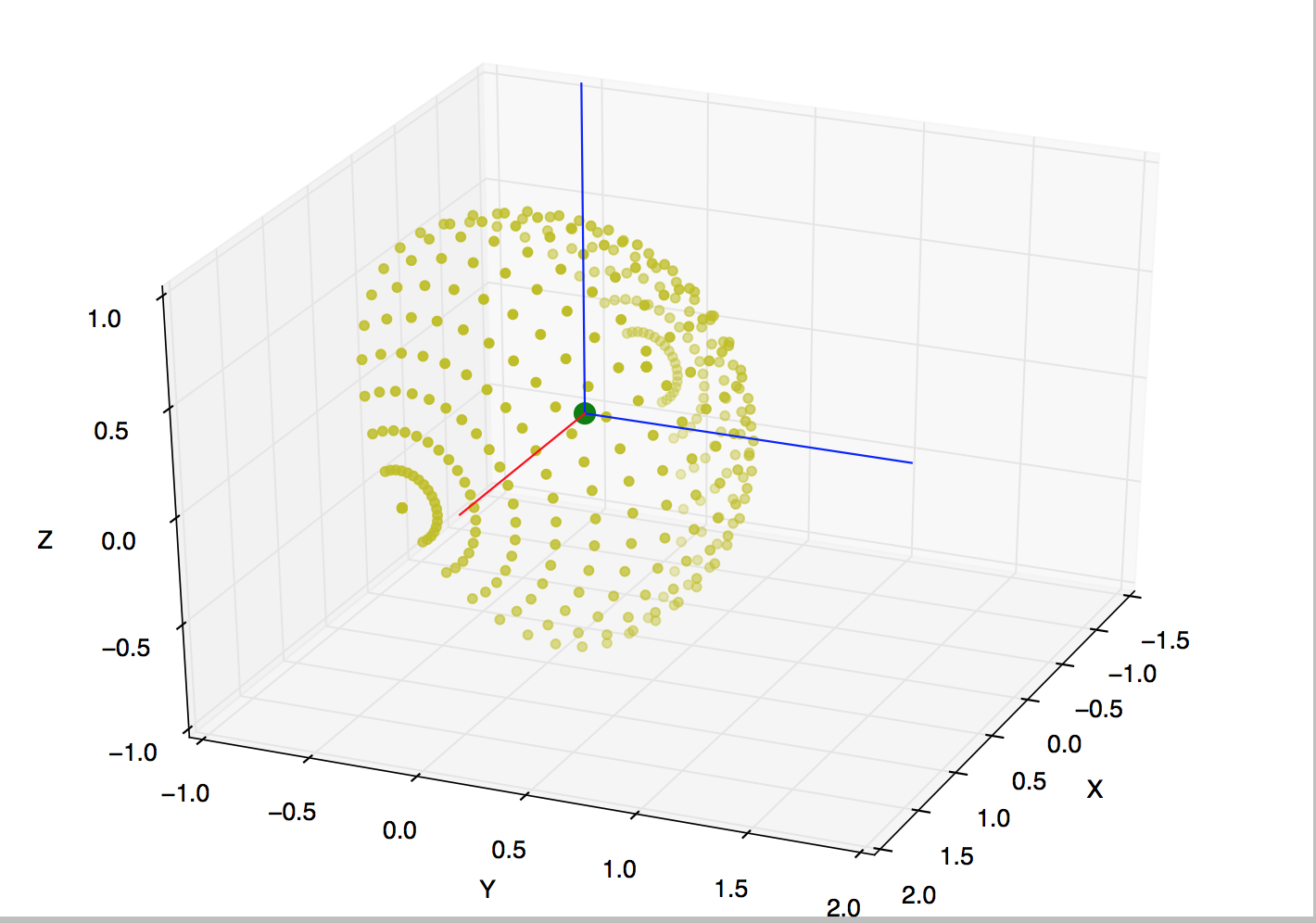
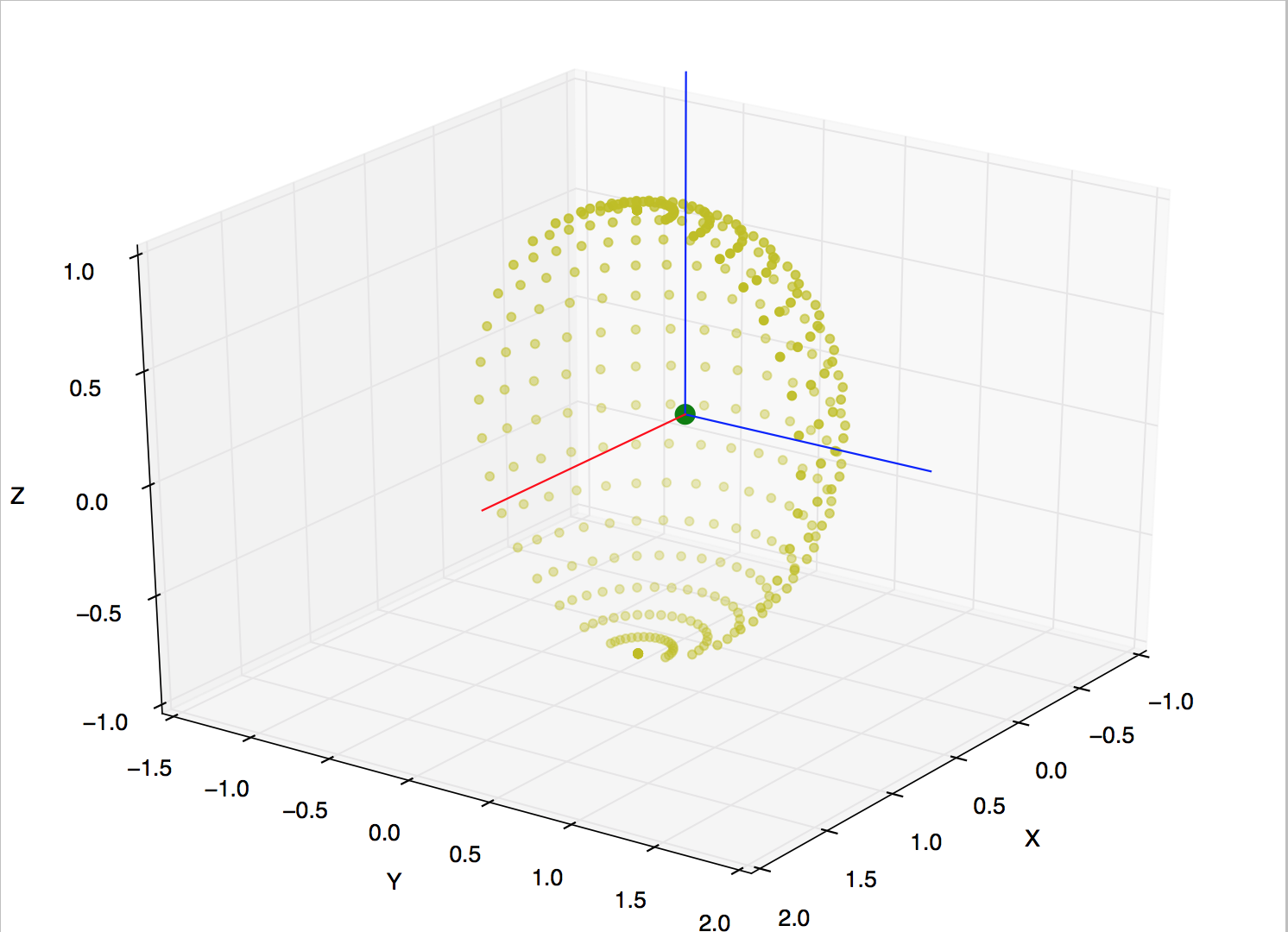
我想要的是:
回答 2
Stack Overflow用户
回答已采纳
发布于 2015-09-16 14:17:30
通常,您希望对数据应用旋转矩阵。但是,您还需要找到旋转矩阵。
在这种情况下,更容易直接跳过协方差矩阵的特征向量。这基本上是一种主成分方法。如果我们确定数据的主成分并将物体旋转到那个坐标系中,我们就能有效地做你想做的事情。
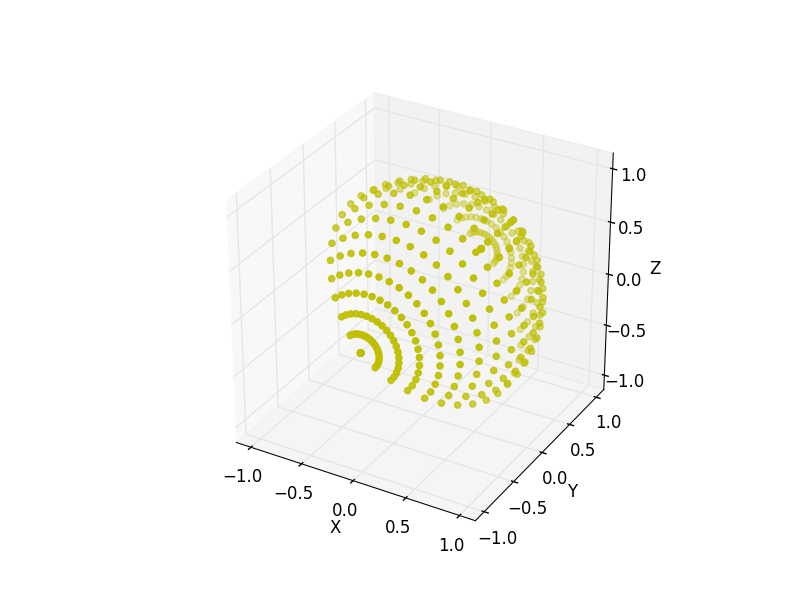
首先,让我们生成一个类似于您的示例:
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
def main():
x, y, z = generate_data()
plot(x, y, z)
plt.show()
def generate_data():
lat, lon = np.radians(np.mgrid[-90:90:20j, 0:180:20j])
lon -= np.radians(40)
z = np.cos(lat) * np.cos(lon)
x = np.cos(lat) * np.sin(lon)
y = np.sin(lat)
return x, y, z
def plot(x, y, z):
fig, ax = plt.subplots(subplot_kw=dict(projection='3d'), facecolor='w')
artist = ax.scatter(x, y, z, marker='o', color='y')
ax.set(xlim=[-1.1, 1.1], ylim=[-1.1, 1.1], zlim=[-1.1, 1.1], aspect=1)
ax.set(xlabel='X', ylabel='Y', zlabel='Z')
return artist
main()
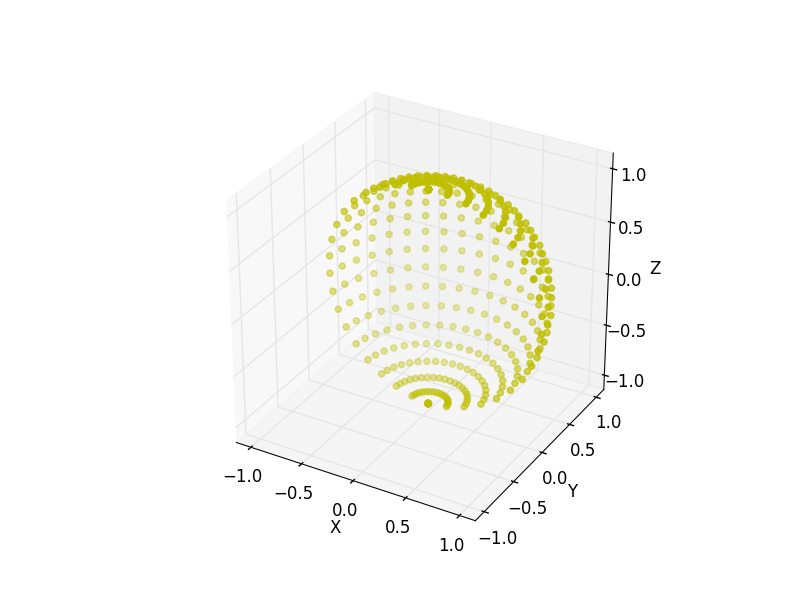
现在我们可以根据主坐标旋转物体:
def reorient(x, y, z):
xyz = np.vstack([x.ravel(), y.ravel(), z.ravel()])
cov = np.cov(xyz)
# Find the eigenvectors of the covariance matrix
vals, vecs = np.linalg.eigh(cov)
idx = np.argsort(vals)
# The eigenvalues vals are not needed below, but this puts them in
# the same order as the eigenvectors, should they be needed in future
# versions of this code:
vals, vecs = vals[idx], vecs[:, idx]
# In this case, we actually want the second eigenvector to be the x-axis
vecs = vecs[:, [1, 0, 2]]
# Now let's perform a change-of-basis into the new coordinate system
return np.linalg.inv(vecs).dot(xyz)并绘制结果:
def main():
x, y, z = generate_data()
plot(*reorient(x, y, z))
plt.show()
注意:我已经隐式地假设您的数据已经集中在旋转发生的点上。如果不是这样的话,在计算协方差矩阵之前,您需要减去旋转点(例如平均值),然后在基值变化后再将它加回去。
Stack Overflow用户
发布于 2015-09-16 14:15:09
这里有一个想法。拿出你的观点的凸包。如果你的表面的“开口”是平面的,那么这个开口将在凸起的外壳中被几乎共面覆盖。然后,所有人脸的法线向量将有一个不同的模式,这可以帮助识别边界。
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/32609158
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号