
C++ / OpenCV -深度地图问题:点云中的项目有一些扭曲
我想要创建一个深度地图,以获得每个像素的三维位置,以便我可以有一些选定项目的三维位置在我的图片。为了查看我的深度数据是否正确,我用MeshLab可视化了它。
我使用基蒂数据集的立体数据,因此图像是校正的和校准为每一个相机提供。
这一进程如下:
图像左+图像右->利用立体半全局匹配(SGBM)计算视差->使用cv::reprojectImageTo3D()计算深度图,根据校准参数和此函数计算Q初始化:
cv::stereoRectify(cameraMatrix1, distCoeffs1, cameraMatrix2, distCoeffs2, imgSize, R, T, R1, R2, P1, P2, Q);我的问题是:
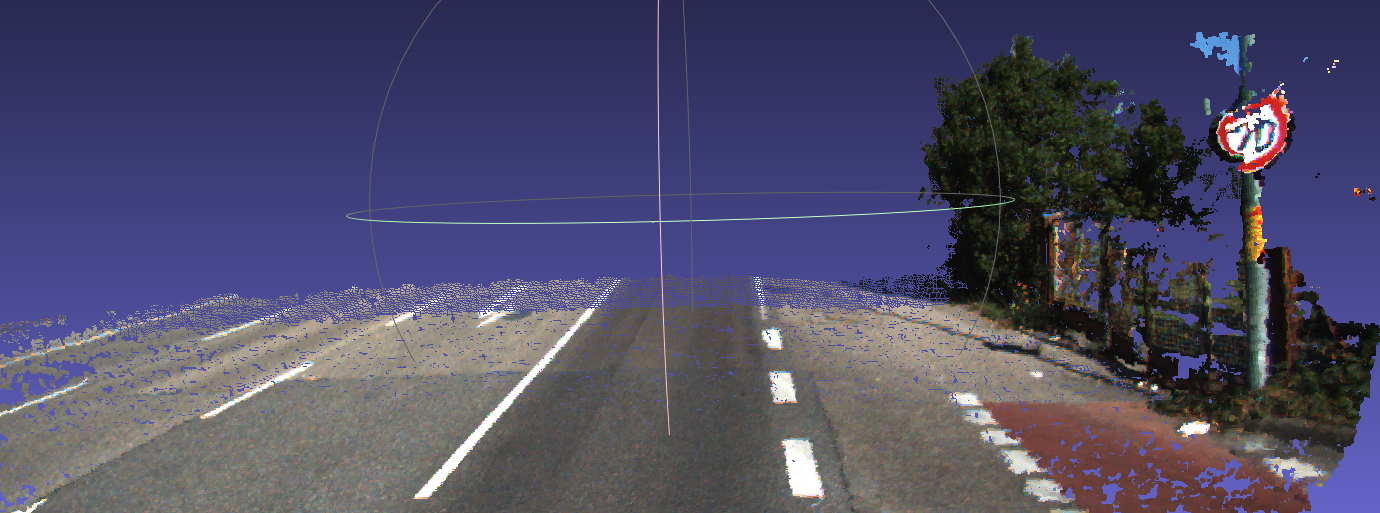
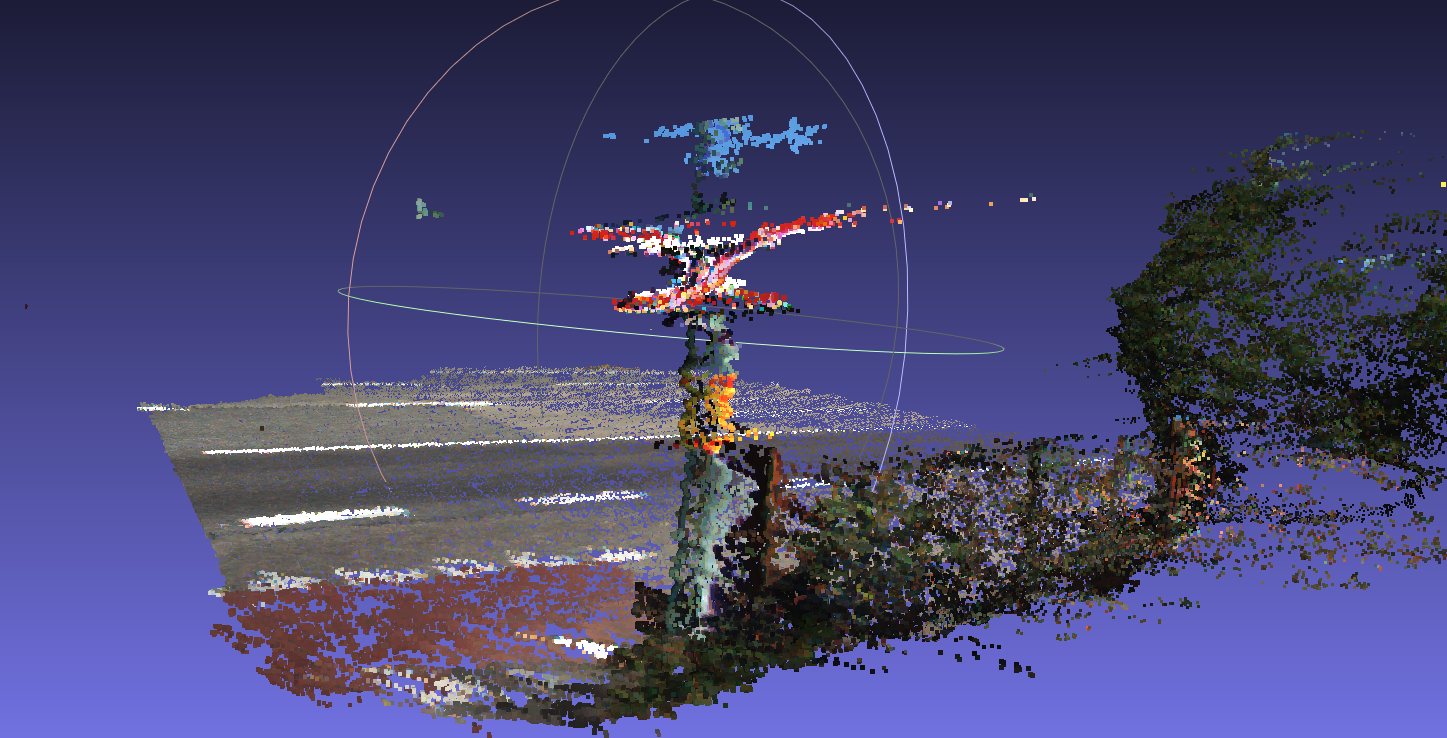
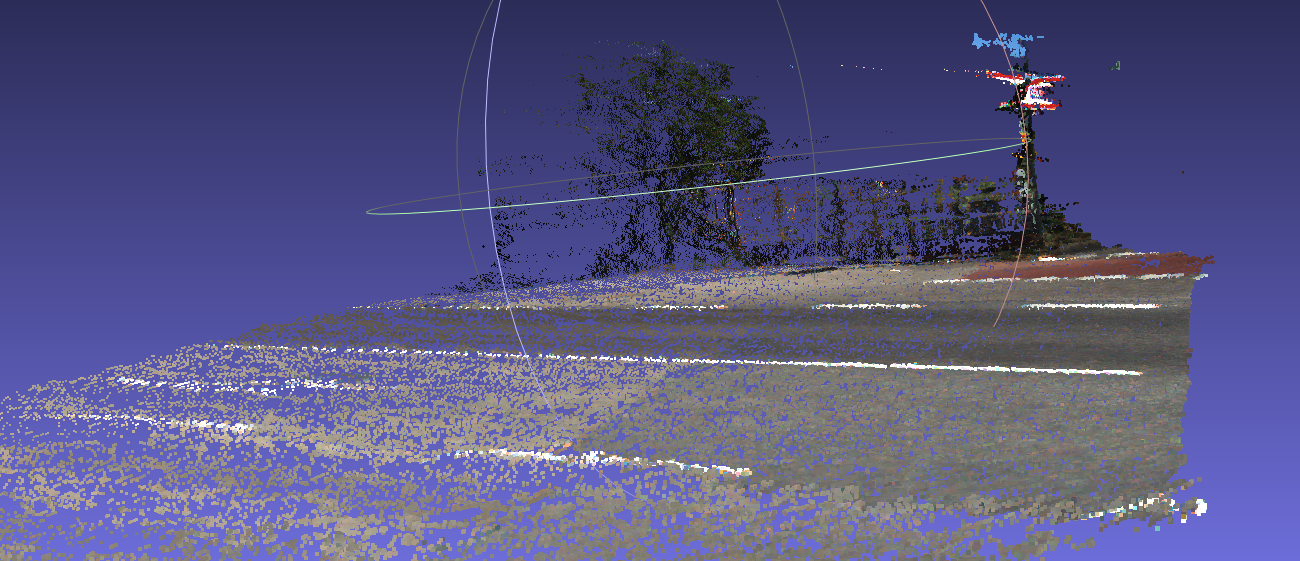
道路是可以的,但标志板有一些失真。我不明白,我试图改变参数,但没有成功。我总是有这种扭曲。这是烦人的,因为我不能计算一个良好的三维位置的标志板。我也尝试了经典的块匹配,但是它是一样的,结果与半全局匹配的结果不太好。
然而,我的差距看起来是这样的(对我来说这似乎很好):
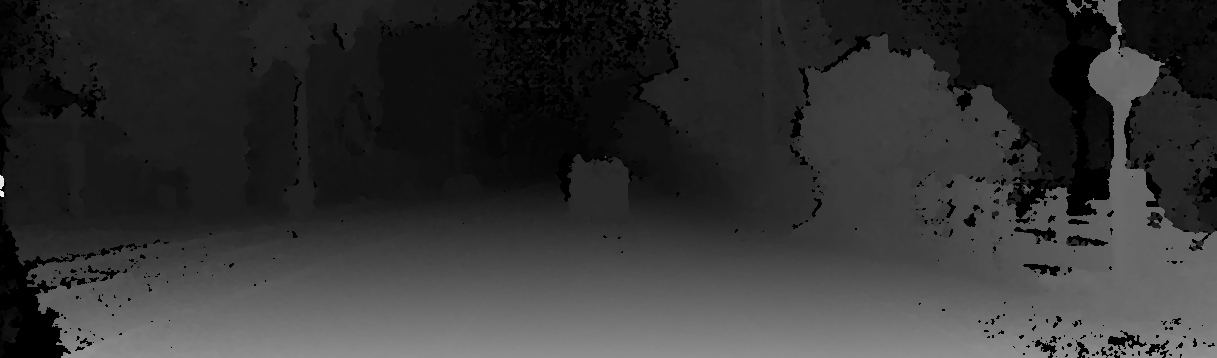
视差计算的参数如下:
StereoSGBM sgbm;
sgbm.SADWindowSize = 3;
sgbm.numberOfDisparities = 128;
sgbm.preFilterCap = 10;
sgbm.minDisparity = 0;
sgbm.uniquenessRatio = 10.0;
sgbm.speckleWindowSize = 100;
sgbm.speckleRange = 32;
sgbm.disp12MaxDiff = 1;
sgbm.fullDP = 1;
sgbm.P1 = sgbm.SADWindowSize*sgbm.SADWindowSize*4;
sgbm.P2 = sgbm.SADWindowSize*sgbm.SADWindowSize*32;
sgbm(gray1, gray2, disp);你知道为什么会这样吗?我怎么能解决这个问题?我想要一个平面很好的标牌。
回答 1
Stack Overflow用户
发布于 2015-07-09 22:40:20
通过使用SGBM参数,您可能可以稍微改进一些东西,但是现实情况是,立体声数据是嘈杂的,您不应该期望在点云中得到一个完美的平面标志。
如果您有兴趣找到标志的三维位置,将标志从RGB图像中分割出来,并将点云中的对应点平均在一起,应该会产生合理的结果。
https://stackoverflow.com/questions/31308641
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号