
OpenCV -奇数HSV距离检测
我有一个Qt应用程序,我必须找到HSV范围的几个像素左右点击坐标,以跟踪稍后。我就是这样做的:
cv::Mat temp;
cv::cvtColor(frame, temp, CV_BGR2HSV); //frame is pulled from a video or jpeg
cv::Vec3b hsv=temp.at<cv::Vec3b>(frameX,frameY); //sometimes SIGSEGV?
qDebug() << hsv.val[0]; //look up H
qDebug() << hsv.val[1]; //look up S
qDebug() << hsv.val[2]; //look up V
//just base values so far, will work on range later
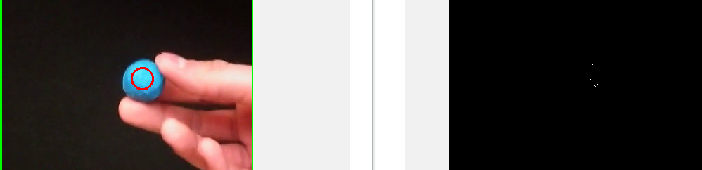
emit hsvDownloaded(hsv.val[0], hsv.val[0]+5, hsv.val[1], 255, hsv.val[2], 255); //send to GUI which automaticly updates worker thread现在一切都很奇怪。这些是结果(红色圆圈表示单击位置):


红色是奇怪的,形状的上半部是正确的,下半部分是不正确的,尽管它是相同颜色的固体质量。

为了一个实际的测试
它检测HSV {95,196,248},坦白地说这是荒谬的(基值太高)。检测到的像素中没有一个是被单击的像素。100%的时间来检测这个球的最佳值是H:35-141 S:0-238 V:65-255。我一直想从归一化直方图中得到HSV的范围,但我甚至不能得到正确的基值。出什么事啦?当OpenCV使用kalibrowanyPlik.read(frame);拉出一个框架时,默认的颜色方案是BGR,对吗?
为什么颜色检测会这么随意?
回答 1
Stack Overflow用户
发布于 2015-05-28 08:48:03
正如berak所提到的,您的代码看起来像是使用了索引来以错误的顺序访问像素。
这意味着您的像素位置是错误的,除了位于对角线上的像素,因此将正确地检测到位于对角线周围的单击对象,而所有其他对象都不会被检测到。
为了避免一次又一次地感到困惑,我希望您理解为什么OpenCV对索引使用(row,col)排序:
OpenCV使用矩阵来表示图像。在数学中,2D矩阵使用(行、行)索引,查看arrays并观察索引。因此,对于矩阵,通常首先使用行索引,然后使用列索引。
不幸的是,图像和像素通常有一个(x,y)索引,它对应于数学图形和坐标系中的x/y轴/方向。在这里,首先使用x位置,然后是y位置。
幸运的是,OpenCV提供了两个不同版本的.at方法,一个用于访问像素位置,另一个用于访问矩阵元素(它们最终都是完全相同的元素)。
matrix.at<type>(row,column) // matrix indexing to access elements
// which equals
matrix.at<type>(y,x)和
matrix.at<type>(cv::Point(x,y)) // pixel/position indexing to access elements由于第一个版本的效率应该稍微高一些,如果位置还没有给定为cv::Point对象,则应该更好。所以最好的方法通常是记住,openCV使用矩阵来表示图像,并且使用矩阵索引符号来访问元素。
顺便说一句,我看到人们在了解到matrix.at<type>(cv::Point(y,x))图像使用了“错误的排序”之后,会想知道为什么openCV没有按预期的方式工作。我希望这个问题不要在我解释之后才提出来。
还有一点:在学校里,我已经在想,为什么矩阵索引第一行,而函数图首先是x轴。我发现不对两者使用“相同”的命令是愚蠢的,但我仍然不得不接受它:D (最后,两者都与另一个没有多大关系)。
https://stackoverflow.com/questions/30483325
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号