
滤波/去噪
滤波/去噪
提问于 2015-04-30 19:52:41
问题很简单。如何消除数据中的噪声?我合成了一些x和y值,以及一些噪声,这是我所处理的数据的总体简化(除了随机噪声之外,我无法使之与我必须处理的噪声相同)。我真的不知道我是否需要过滤或平滑。我的文件包含两组需要绘制的数据,这些数据中存在实验噪声,什么是删除它的最佳方法?平滑还是过滤?
最近,我在另一篇文章中发布了这段代码,我所做的就是给它添加噪音。
import matplotlib.pyplot as plt
import numpy as np
from scipy.optimize import curve_fit, minimize_scalar
x1 = [1,2,2.5,3.2,2.8,3.5,4,5]
y = [1,4,9.2,16,16.1,9.6,4,1]
noise = np.random.normal(0,1,8)
x = x1 + noise #bring on the noise
def f(x, p1, p2, p3):
return p3*(p1/((x-p2)**2 + (p1/2)**2))
p0 = (8, 16, 0.1) # guess perameters
plt.plot(x,y,"ro")
popt, pcov = curve_fit(f, x, y, p0)
fm = lambda x: -f(x, *popt) #this part and below is not my code but the
#solution to my previous question
r = minimize_scalar(fm, bounds=(1, 5))
print "maximum:", r["x"], f(r["x"], *popt)
x_curve = np.linspace(1, 5, 100)
plt.plot(x_curve, f(x_curve, *popt))
plt.plot(r['x'], f(r['x'], *popt), 'ko')
plt.show()如果我去掉噪音,用x代替x1 .我的数据点得到了一个不错的冷杉。当涉及噪音时,我怎样才能接近这个?
回答 1
Stack Overflow用户
发布于 2018-10-27 00:05:07
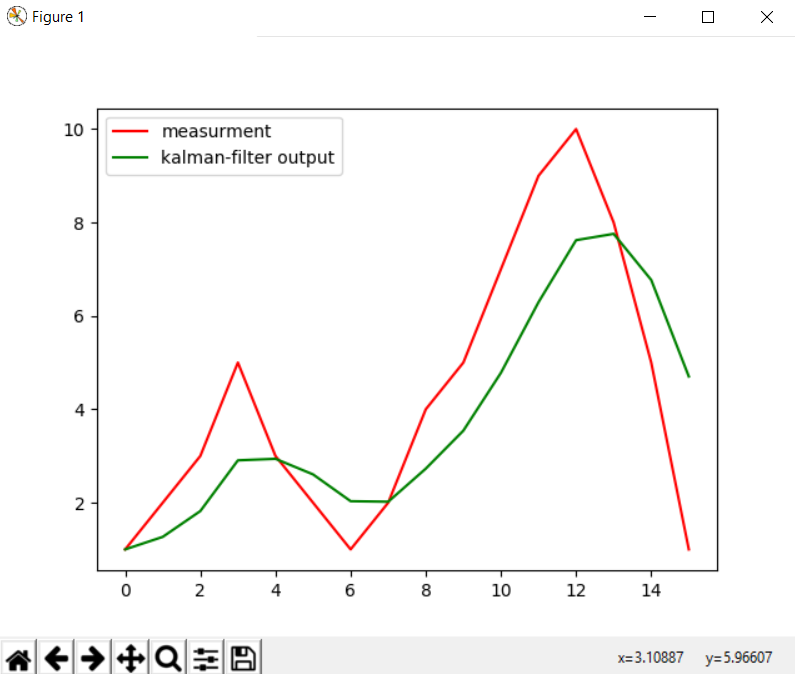
利用卡尔曼滤波去除噪声的最简单的方法。假设你的数据(测量)有一些噪音。你想用过滤器修正。使用卡尔曼滤波器并根据您的数据转换更改transition_covariance变量。
import matplotlib.pyplot as plt
from pykalman import KalmanFilter
import numpy as np
measurements = np.asarray([1, 2, 3, 5, 3, 2, 1, 2, 4, 5,7, 9, 10, 8, 5, 1])
kf = KalmanFilter(transition_matrices=[1],
observation_matrices=[1],
initial_state_mean=measurements[0],
initial_state_covariance=1,
observation_covariance=5,
transition_covariance=1) #0.01)
state_means, state_covariances = kf.filter(measurements)
state_std = np.sqrt(state_covariances[:,0])
print (state_std)
print (state_means)
print (state_covariances)
plt.plot(measurements, '-r', label='measurment')
plt.plot(state_means, '-g', label='kalman-filter output')
plt.legend(loc='upper left')
plt.show()页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/29976619
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号