
计算kinect的深度特征?
计算kinect的深度特征?
提问于 2015-04-19 03:33:01
我正在学习kinect是如何工作的。但我是这个领域的新手。谁来帮帮我,更好地理解给出的公式
F x+(u/DI(X))-DI(x+(v/DI(X)
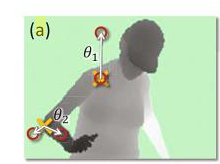
在描述中,给出了dI (x)是图像I中像素x处的深度,参数ϴ= (u,v)描述的偏移量u和v。用1/dI (x)对偏移进行归一化,保证了特征是深度不变的:在物体上给定的点上,无论像素离相机近还是远,都会产生固定的世界空间偏移。
我仍然无法理解整个公式,什么是像素x的深度,什么是偏移u,v,偏移u和v,归一化的偏移量,..please帮助!
回答 1
Stack Overflow用户
回答已采纳
发布于 2015-05-19 09:58:01
对于像素X和偏移量(U,V)都是向量而不是数字。
例如,X是(100,200)。U为(5,0) V为(0,10)。
偏移归一化意味着当点靠近摄像机时,随着近区域深度值的增大,偏移量越小。在你能看到的图片中,theta1比theta2大。在这种情况下,深度是不变的。
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/29725473
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号