
三维点云深度值的理解
我很难理解三维稀疏重建所产生的三维点云的深度(Z)值,如MATLAB:http://www.mathworks.com/help/vision/ug/sparse-3-d-reconstruction-from-multiple-views.html中的例子。
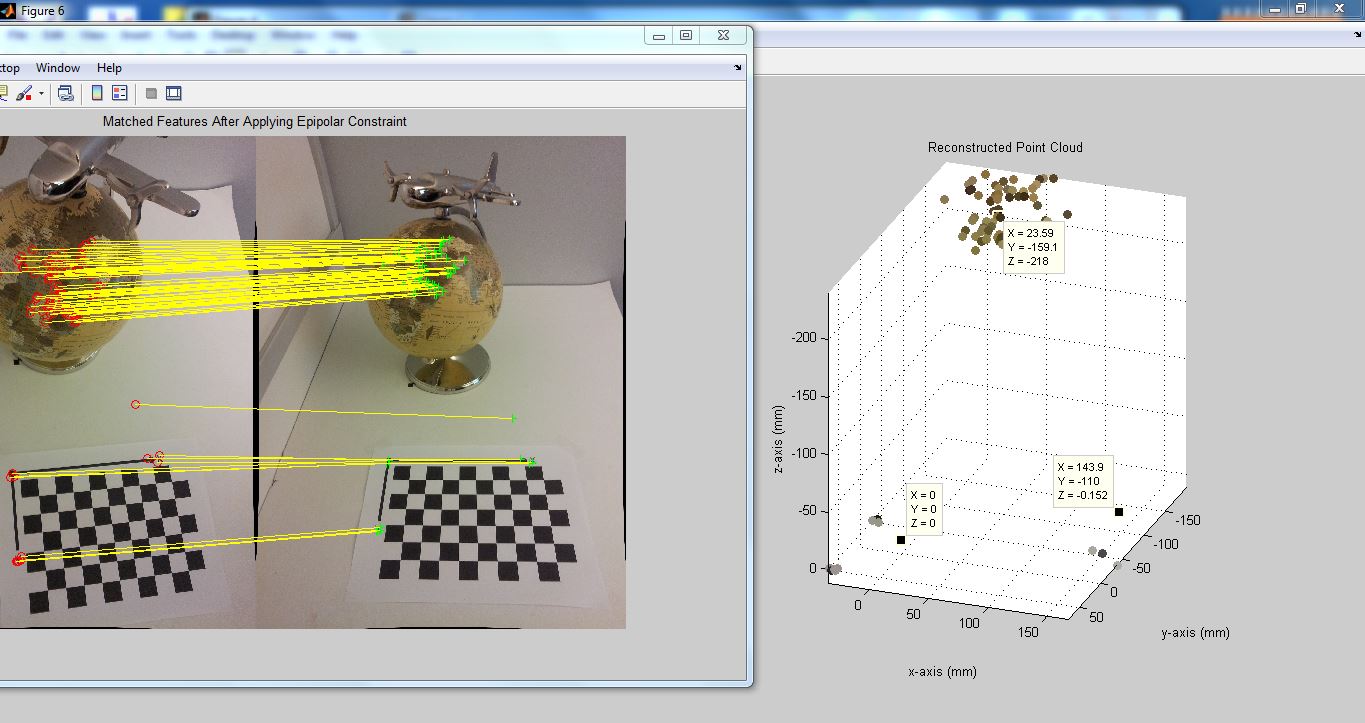
在上面的例子中,我附上了一张显示重建的三维点云的图片。我在图上放了一些数据,这样我们就知道了点的(x,y,z)坐标。以下是我的问题:
1-点云中的Z值代表什么?离相机的距离是毫米吗?如果是这样的话,那么根据我所附的图片就没有意义了,因为我确信球体和棋盘与相机的距离必须大于200毫米。或者可能是从太空的某个参照点?那这个参照点是什么?如何制作一个Z值表示与相机距离的三维点云?
2-为什么Z有负值?就距离相机而言,这意味着什么?
如果有人能解释的话我很感激。
回答 2
Stack Overflow用户
发布于 2015-03-17 20:56:30
在本例中,世界坐标由棋盘定义。棋盘定义了X平面,Z轴指向棋盘,如文档所解释。
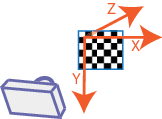
因为你的3D点在棋盘上方,所以它们有负的Z坐标。
Stack Overflow用户
发布于 2014-09-17 04:52:50
您的(x,y,z)坐标是以世界单位表示的,这些坐标与度量值完全断开(除非在世界和度量之间建立一个标度,否则有各种方法来实现它)。所以z值告诉你世界坐标中每个点的深度。
如果你有每个相机的姿势,然后用相机投影矩阵乘以每个点,你就会得到相机坐标中的(x',y',z')点。在这一点上,如果z‘是负的,就意味着它在摄像机后面。
https://stackoverflow.com/questions/25880873
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号