
基于电路板图像的PCB基准检测
这里我试图用相机实时检测PCB上的基准点,同时我也使用C#.net 4 win-form应用程序。
在谷歌搜索了两天并阅读了很多帖子和博客之后。我发现我必须做一些叫做平移错误检测和旋转错误检测的事情。
即。实际()和所需(已知位置)图像上基准(对象)的位置
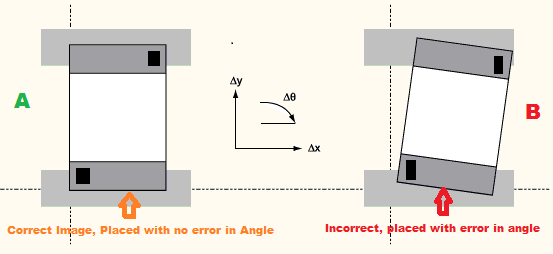
如下图所示
黑方体在右下角和左上角的基准点,我需要检测和使用的错误检查。
这里(A)是正确的图像,(B)是在基准点位置有误差的图像。
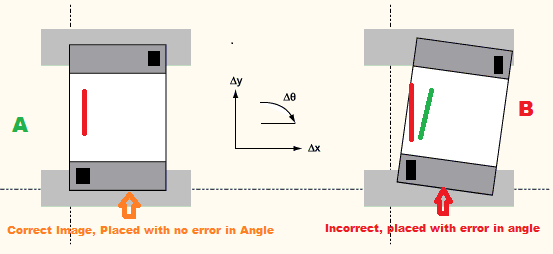
现在我必须在图像上画一条线,关于基准点。因此,在图像A上,我可以画线(红色),如下图(A)所示。
但是,如果我在图像(B)上画相同的线,因为它的放置方式有错误,如果我使用X和Y的相同值,我就会画错线(红色)。
但是在这里,对于(B)上的正确行,我需要在我的X和Y值中添加错误值,这样我就可以绘制正确的直线(GRREN),如(B)所示。
所以,在这里,我试图找出我如何存档这个;
1)检测两个基准点,得到它们在图像上的位置,并与正确的位置进行比较。
2)找出错误(在角度/在事务/在旋转中)?
3)通过添加X值和Y值来使用错误值。
我还发现Aforge.net或OpenCV对此很有用,但我不确定如何使用?还有其他可能的形状,如三角,钻石和圆。
如有任何帮助/指导,我们将不胜感激!耽误您时间,实在对不起。
编辑
我有偏移值,对于两个点,(DX1,DY1)和(DX2,DY2)都是移动原始点的值。
那么,现在我该如何使用它?若要更正放置中的错误,请执行以下操作。现在我该如何使用它?
回答 1
Stack Overflow用户
发布于 2015-09-27 03:24:37
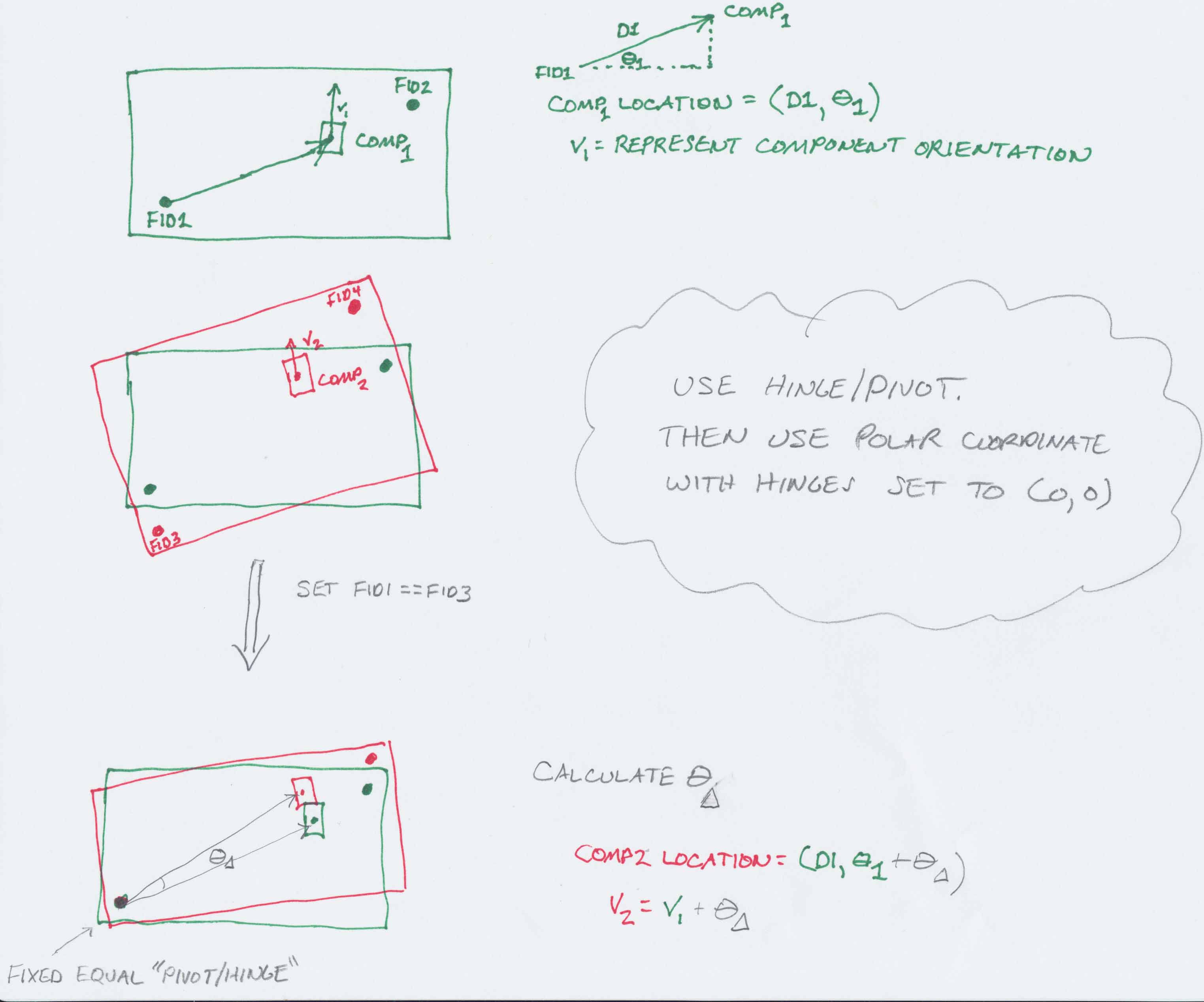
将实际的FID1调整为0,0,并将预期的FID1调整为0,0。这就产生了一个“铰链/枢轴”点。现在,所有其他的基准和所有其他组成部分可以表示为极坐标从0,0铰链。
现在,忘记X,Y坐标系。你不关心X,Y。你必须把所有的X,Y转换成极坐标,用很多有意义的数字来保证精度。
现在,你只需计算出从预期到实际的三角角!再一次,不用用铰链/枢轴的概念来计算X,Y,期望和实际的向量距离总是相等的。矢量的长度永远不会改变,期望是实际的--只有角度变化!
记住,无论你如何旋转,PCB都是相同的尺寸。想想老派的量角器。将量角器设置为0,0原点并画一个弧!
我没有足够大的声誉来发布一张图片,所以不幸的是,我不得不链接到图像。此外,我有太多的项目给你一个适当的教程,所以这个2分钟的psuedo插图将必须足够好。
https://stackoverflow.com/questions/24751412
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号