
基于OpenCV的计算机视觉滤波凸壳与凸性缺陷
我在处理数字信号方面有问题。我正在尝试检测指尖,类似于这里提出的解决方案:基于JavaCV的手指头检测。
然而,我使用的不是JavaCV,而是OpenCV,这与安卓略有不同。我已经完成了本教程中介绍的所有步骤,但是过滤了凸壳和凸性缺陷。我的形象是这样的:
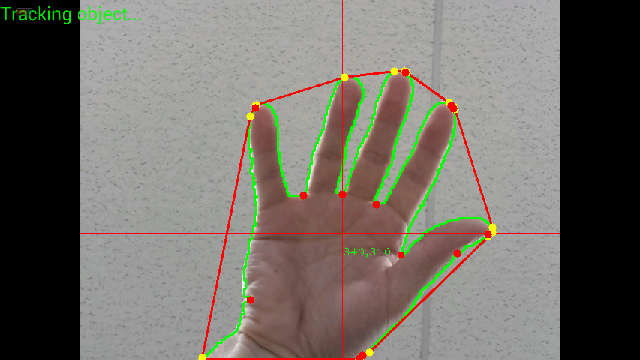
下面是另一种分辨率中的图像:
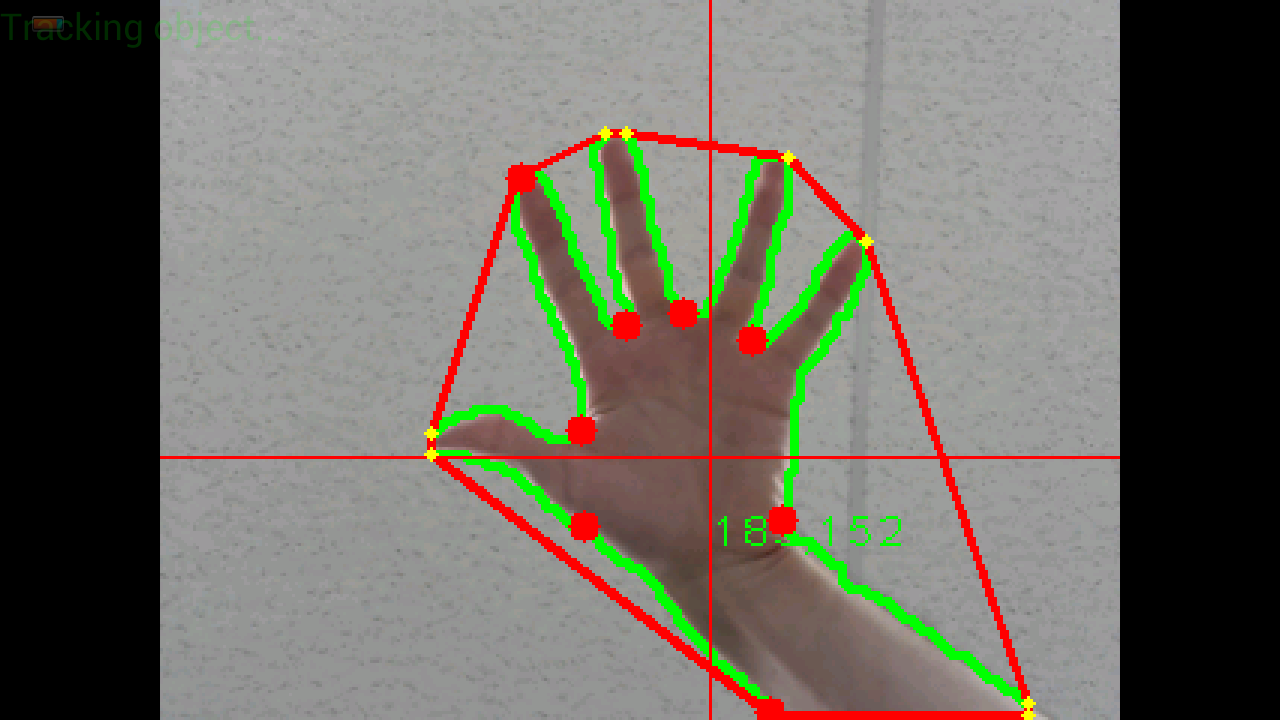
你可以清楚地看到,有许多黄色点(凸壳),也有许多红点(凸性差)。有时在两个黄点之间没有红点,这是相当奇怪的(如何计算凸壳?)
我需要的是像前面提供的链接一样创建simillar过滤函数,但是使用OpenCV的数据结构。
凸壳是MatOfInt .凸性缺陷是MatOfInt4的一种.
我还创建了一些额外的数据结构,因为愚蠢的OpenCV在不同的方法中使用不同类型的包含相同数据的数据.
convexHullMatOfInt = new MatOfInt();
convexHullPointArrayList = new ArrayList<Point>();
convexHullMatOfPoint = new MatOfPoint();
convexHullMatOfPointArrayList = new ArrayList<MatOfPoint>();这是我到目前为止所做的事情,但效果并不好。问题可能在于以错误的方式转换数据:
制造凸壳和凸性缺陷:
public void calculateConvexHulls()
{
convexHullMatOfInt = new MatOfInt();
convexHullPointArrayList = new ArrayList<Point>();
convexHullMatOfPoint = new MatOfPoint();
convexHullMatOfPointArrayList = new ArrayList<MatOfPoint>();
try {
//Calculate convex hulls
if(aproximatedContours.size() > 0)
{
Imgproc.convexHull( aproximatedContours.get(0), convexHullMatOfInt, false);
for(int j=0; j < convexHullMatOfInt.toList().size(); j++)
convexHullPointArrayList.add(aproximatedContours.get(0).toList().get(convexHullMatOfInt.toList().get(j)));
convexHullMatOfPoint.fromList(convexHullPointArrayList);
convexHullMatOfPointArrayList.add(convexHullMatOfPoint);
}
} catch (Exception e) {
// TODO Auto-generated catch block
Log.e("Calculate convex hulls failed.", "Details below");
e.printStackTrace();
}
}
public void calculateConvexityDefects()
{
mConvexityDefectsMatOfInt4 = new MatOfInt4();
try {
Imgproc.convexityDefects(aproximatedContours.get(0), convexHullMatOfInt, mConvexityDefectsMatOfInt4);
if(!mConvexityDefectsMatOfInt4.empty())
{
mConvexityDefectsIntArrayList = new int[mConvexityDefectsMatOfInt4.toArray().length];
mConvexityDefectsIntArrayList = mConvexityDefectsMatOfInt4.toArray();
}
} catch (Exception e) {
Log.e("Calculate convex hulls failed.", "Details below");
e.printStackTrace();
}
}过滤:
public void filterCalculatedPoints()
{
ArrayList<Point> tipPts = new ArrayList<Point>();
ArrayList<Point> foldPts = new ArrayList<Point>();
ArrayList<Integer> depths = new ArrayList<Integer>();
fingerTips = new ArrayList<Point>();
for (int i = 0; i < mConvexityDefectsIntArrayList.length/4; i++)
{
tipPts.add(contours.get(0).toList().get(mConvexityDefectsIntArrayList[4*i]));
tipPts.add(contours.get(0).toList().get(mConvexityDefectsIntArrayList[4*i+1]));
foldPts.add(contours.get(0).toList().get(mConvexityDefectsIntArrayList[4*i+2]));
depths.add(mConvexityDefectsIntArrayList[4*i+3]);
}
int numPoints = foldPts.size();
for (int i=0; i < numPoints; i++) {
if ((depths.get(i).intValue()) < MIN_FINGER_DEPTH)
continue;
// look at fold points on either side of a tip
int pdx = (i == 0) ? (numPoints-1) : (i - 1);
int sdx = (i == numPoints-1) ? 0 : (i + 1);
int angle = angleBetween(tipPts.get(i), foldPts.get(pdx), foldPts.get(sdx));
if (angle >= MAX_FINGER_ANGLE) // angle between finger and folds too wide
continue;
// this point is probably a fingertip, so add to list
fingerTips.add(tipPts.get(i));
}
}结果(白点-过滤后的指尖):
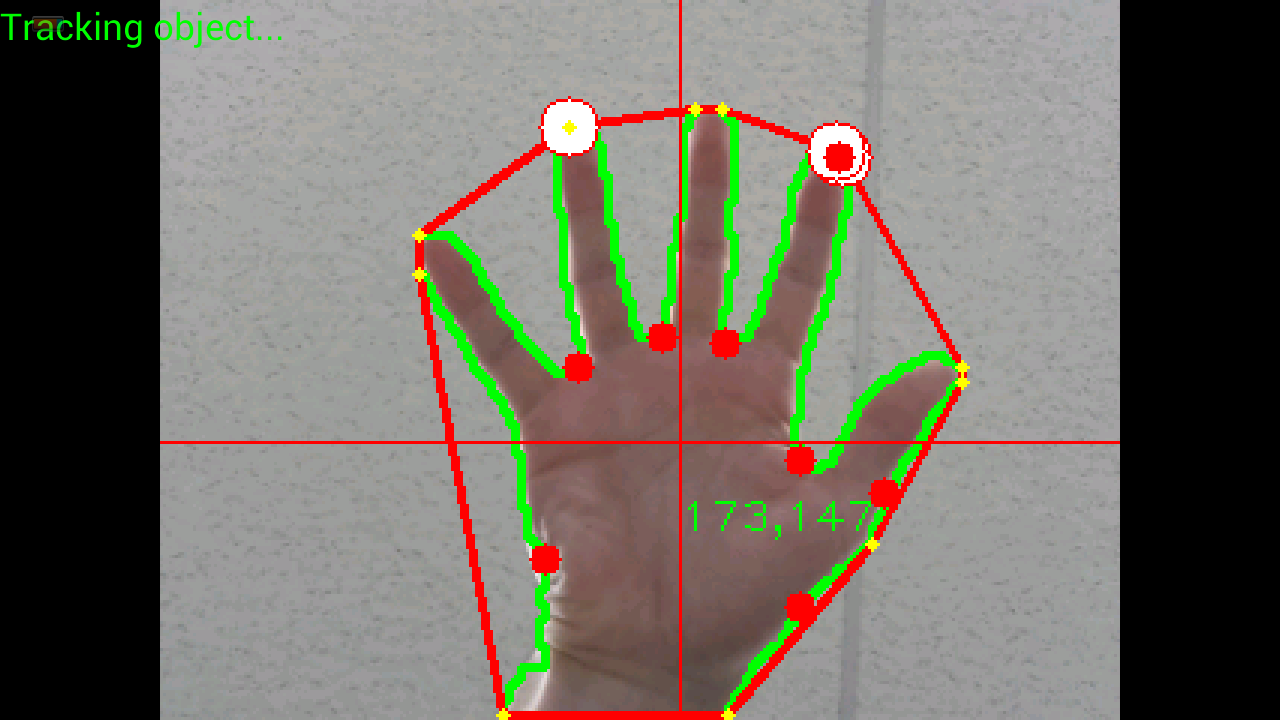
你能帮我写个适当的过滤函数吗?
更新14.08.2013
我使用标准的openCV函数进行等高线近似。我必须改变分辨率变化的近似值,和手对相机的距离,这是相当困难的。如果分辨率较小,则手指由较少的像素组成,因此近似值应该是情人。距离也一样。保持它高将导致完全失去手指。因此,我认为近似并不是解决问题的好办法,尽管小数值可能有助于加速计算:
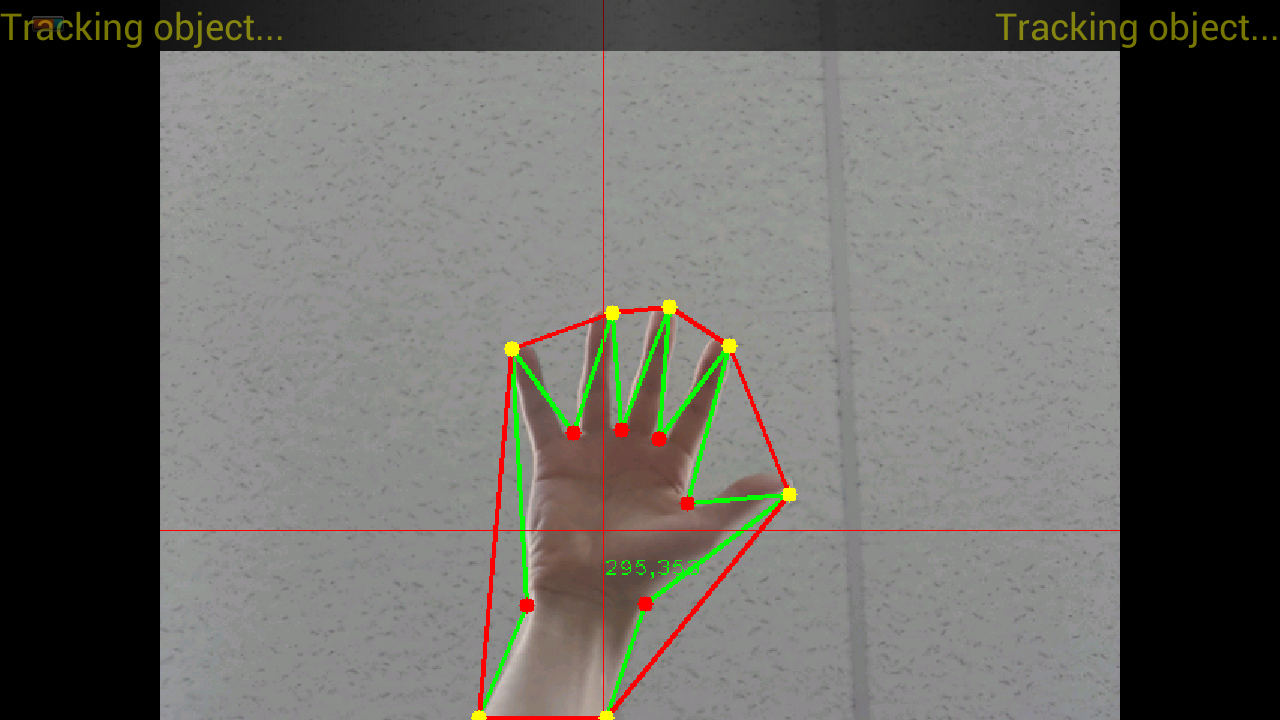
Imgproc.approxPolyDP(frame, frame, 2 , true); 如果我使用高值,那么结果就像在下面的图像,这将是好的,只有当距离和分辨率不会改变。也很惊讶,对于船体点和缺陷点的默认方法没有有用的参数可通过(最小角度、距离等).
下面的图片显示了我想要达到的效果,独立于分辨率或手对相机的距离。当我闭上手掌时,我也不想看到任何黄点.
总之,我想知道:
- 如何滤除点
- 如何使分辨率和距离独立的近似总是工作的。
- 如果有人知道或有一些关于OpenCV中使用的数据结构的材料(图形表示,解释),我很乐意阅读它。(Mat,MatOfInt,MatOfPoint,MatOfPoint2,MatOfPoint4等)
回答 2
Stack Overflow用户
发布于 2013-10-12 20:28:08
在低分辨率的凸包可以用来识别整个手的位置,它对手指没有用处,但确实提供了感兴趣的区域和适当的尺度。
高分辨率的分析应该应用于你的近似轮廓,很容易跳过任何不符合“长度和角度”标准的点,尽管你可能希望“平均”而不是“完全跳过”。
您的代码示例是计算凸性缺陷然后删除它们的一次传递。这是一个逻辑错误。当你走的时候你需要移除点。(a)在一次传递中完成所有操作更快、更简单(b)它避免在第一次传递时删除点数,并在以后添加它们,因为任何删除都会改变以前的计算。
这一基本技术非常简单,因此适用于基本的开放手掌。然而,它在本质上并不理解一只手或一种手势,因此调整尺度、角度和长度参数只会让你“到目前为止”。
参考技术:过滤长度和角度“凸性缺陷”Simen博客http://simena86.github.io/blog/2013/08/12/hand-tracking-and-recognition-with-opencv/
基于Kinect SDK的C#库添加手指方向检测http://candescentnui.codeplex.com/ http://blog.candescent.ch/2011/11/improving-finger-detection.html
“自生长和有组织的神经气体”(SGONG)尼科斯帕帕马科斯教授( Nikos Papamarkos http://www.papamarkos.gr/uploaded-files/Hand%20gesture%20recognition%20using%20a%20neural%20network%20shape%20fitting%20technique.pdf )
商业产品David & Michael是"Leap Motion“http://www.engadget.com/2013/03/11/leap-motion-michael-buckwald-interview/的创始人
Stack Overflow用户
发布于 2013-08-13 12:16:29
我想你错过了这一点:
利用等高线的低多边形近似来加速船体的生成和缺陷分析。
https://stackoverflow.com/questions/18143077
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号