
移动电话陀螺漂移
很多帖子都谈到陀螺漂移问题。有些人说陀螺仪读数有漂移,而另一些人说整合有漂移。
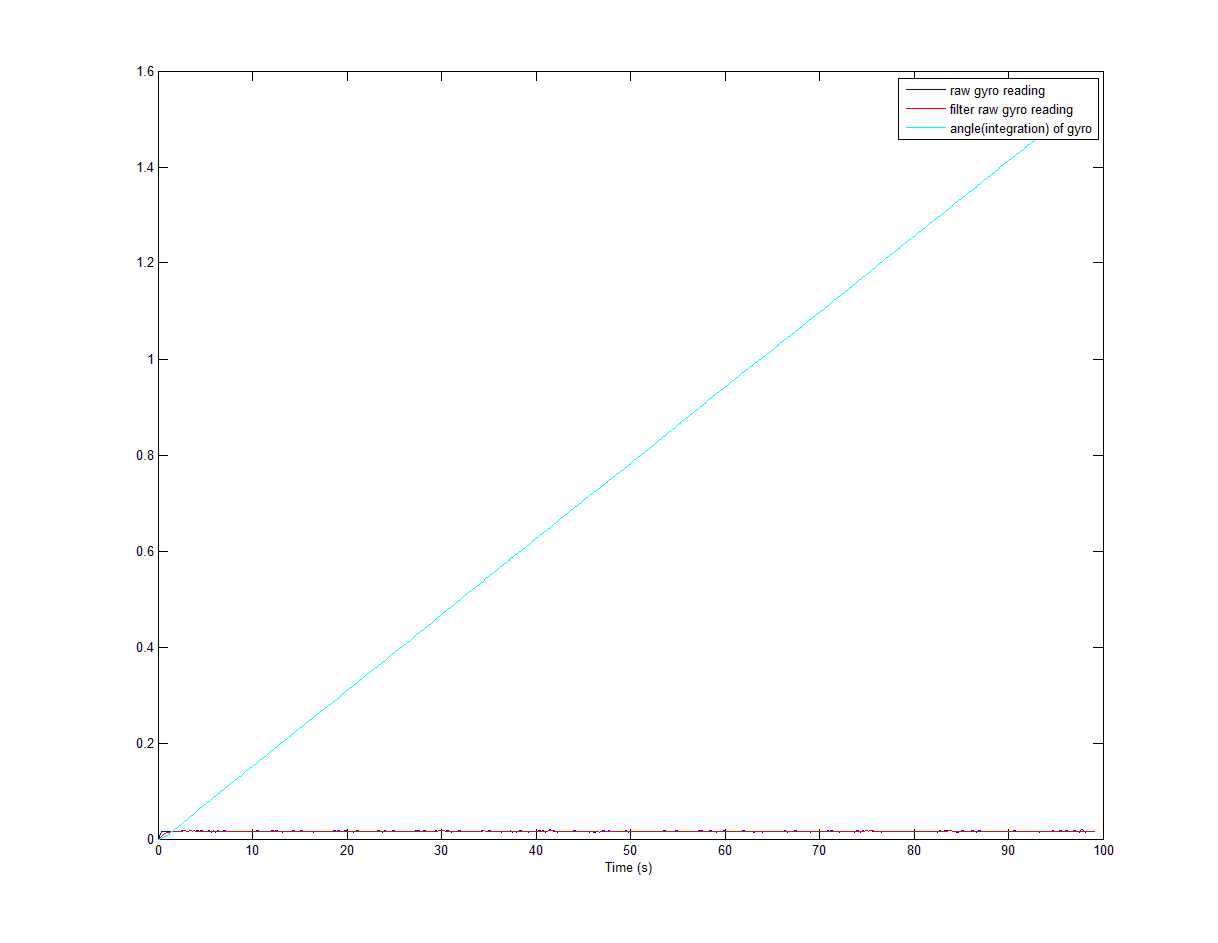
所以,我做了一个实验。接下来的两个数字是我得到的。下图显示陀螺仪读数一点也不漂移,但有偏移量。由于偏移,集成是可怕的。所以,似乎整合就是漂移,是吗?
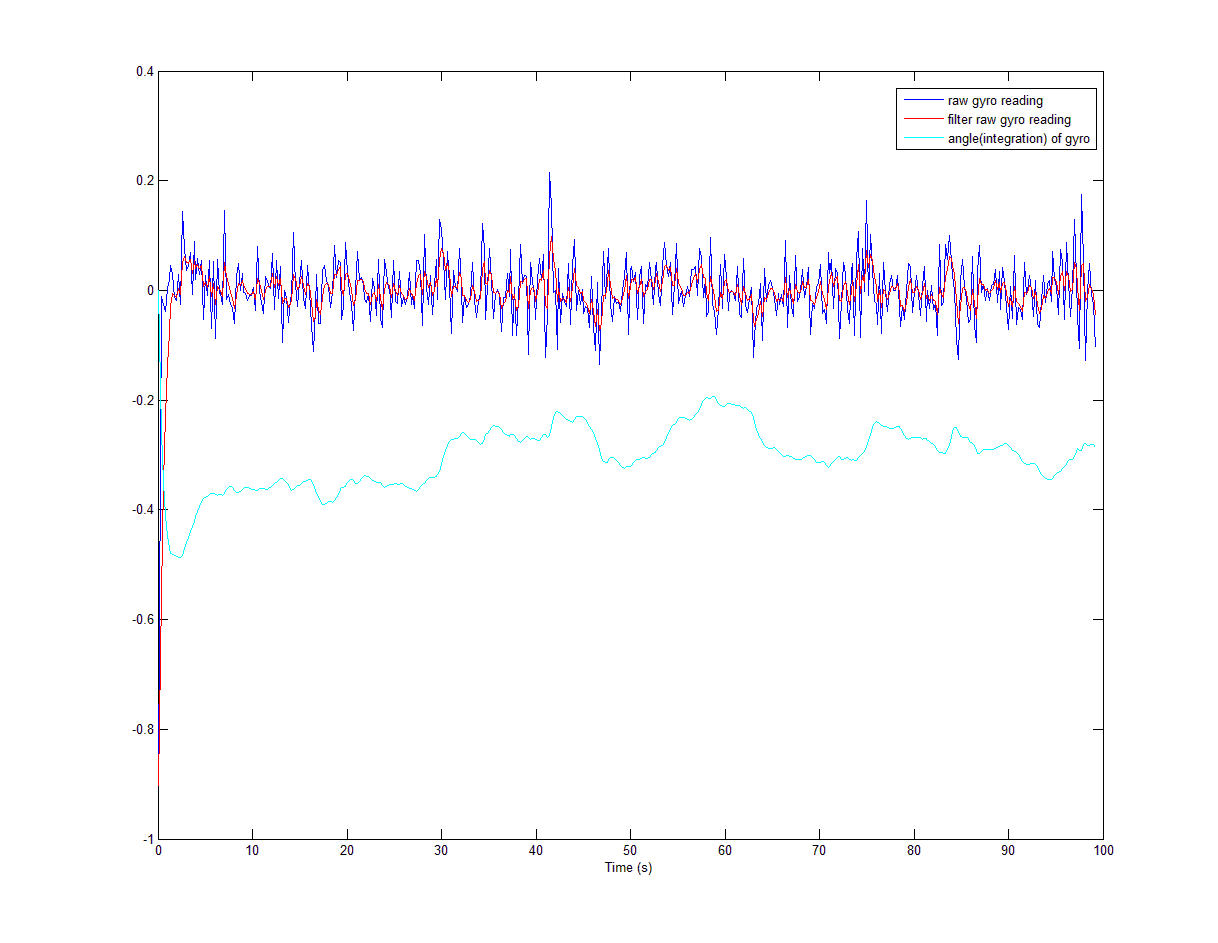
下一个图显示,当偏移量减小时,积分一点也不漂移。
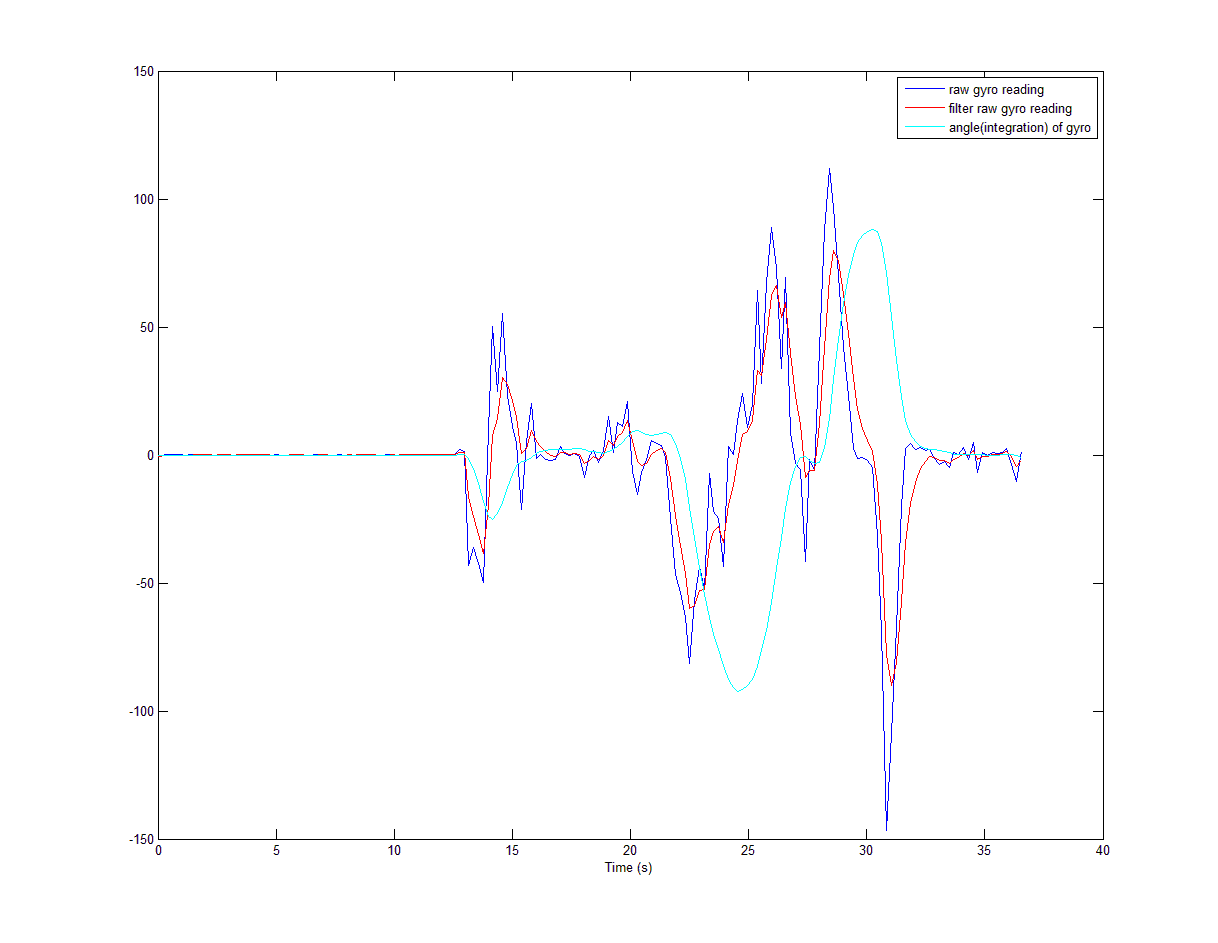
此外,我还进行了另一项实验。首先,我把手机固定在桌子上大约10秒钟。然后把它转到左边,然后恢复到后面。然后右转后退。下面的图很好地说明了角度。我所使用的只是减少偏移量,然后进行集成。
所以,我这里最大的问题是,也许偏移量是陀螺漂移(积分漂移)的本质?在这种情况下,可以使用互补滤波器或卡尔曼滤波来消除陀螺漂移吗?
任何帮助都是非常感谢的。
回答 4
Stack Overflow用户
发布于 2013-01-08 11:18:10
如果陀螺读数存在“漂移”,则称为偏置,而不是漂移。
漂移是由积分引起的,即使偏置完全为零,也会发生漂移。漂移是因为你正在通过积分积累读数的白噪声。
对于漂移消除,我强烈推荐方向余弦矩阵IMU:理论手稿,在此基础上实现了对闪影2设备的传感器融合。
(编辑:该文档来自MatrixPilot项目,该项目已转移到Github,可以在wiki的下载部分找到。)
如果你坚持卡尔曼滤波,那么请看https://stackoverflow.com/q/5478881/341970。
为什么要实现自己的传感器融合算法?
安卓(SensorManager own Sensor.TYPE_ROTATION_VECTOR)和iPhone (岩心运动)都提供了自己的服务。
Stack Overflow用户
发布于 2013-07-07 10:57:53
亲爱的阿里写的东西确实有问题,也不准确(错误)。
漂移是偏置的综合。当你整合时,这是偏见的明显“效果”。噪声--任何一种平稳噪声--都是均值为零的,因此是积分为零(我不是指PSD的积分,而是时间积分的信号的加性噪声)。
偏置随时间的变化,随电压和运动温度的变化而变化。例如,如果电压变化(和它变化),偏置就会改变。它的偏见既不是固定的,也不是“可预测的”。这就是为什么你不能消除偏差,使用建议的减去估计偏差的信号。而且,任何估计都有错误。此误差在时间上累积。如果误差较小,累积(漂移)的影响会在较长的间隔内显现,但它仍然存在。
理论上说,彻底消除偏见是不可能的,在今天。在目前的技术水平上,还没有人找到消除偏置的方法--只有基于陀螺仪和加速度计的磁强计--能够过滤掉所有的偏置。
安卓和iPhone的偏置消除算法实现有限。它们并非完全不受偏见效应的影响(例如,在较小的间隔内)。对于某些应用程序,这可能会导致严重的问题和不可预测的结果。
Stack Overflow用户
发布于 2014-01-11 16:07:46
在这次讨论中,Ali和Stefano都提出了由于理想的整合而产生的漂流的两个基本方面。
从根本上说,零均值白噪声是一个理想化的概念,即使是这种理想的噪声积分,也比噪声的低频分量提供了更高的增益,从而在集成信号中引入了低频漂移。从理论上讲,零均值噪声不应引起长时间观测到的漂移,但实际上理想积分是行不通的。
另一方面,如果在读取(输入信号)中执行理想的积分(无损失求和),即使是较小的直流偏移(输入信号)也会造成明显的漂移。当理想积分对输入信号的直流分量有无限增益时,它可以在系统中增加一个很小的直流偏移量。因此,在实际应用中,我们用低通滤波器代替理想的积分,低通滤波器的截止率可以达到要求,但不能为零,也不能太低,不适合实际应用。
https://stackoverflow.com/questions/14210206
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号