
将非层次化的转换应用于层次化框架?
我使用Blender3D,但答案可能不是API-专属的。
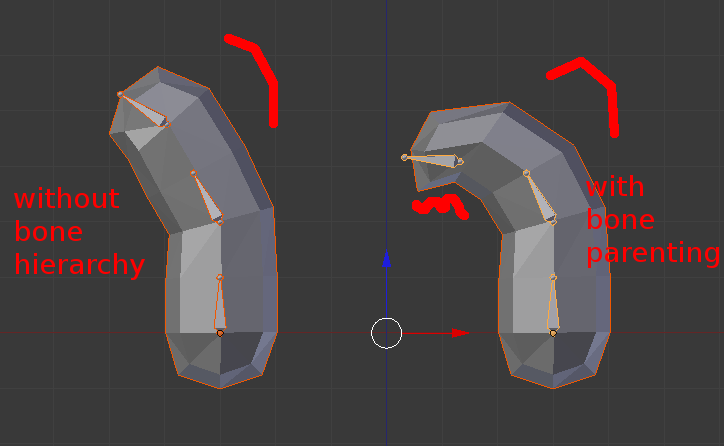
我有一些矩阵需要分配给PoseBones。当没有骨层次结构(育儿)时,所产生的姿势看起来很好;如果有,则看起来很糟糕。
我在这里上传了一个存档,其中包含了被操纵的模型、文本动画导入程序和一个测试动画文件的混合示例:files.html
通过选择一个电枢并在"sba“文件上运行导入程序来导入动画。两种电枢都要这样做。
这就是我如何在真实的(复杂的)进口商中分配姿势:
matrix_bases = ... # matrix from file
animation_matrix = matrix_basis * pose.bones['mybone'].matrix.copy()
pose.bones[bonename].matrix = animation_matrix如果我进入编辑模式,选择“所有骨骼”并按下“Alt+P”来撤消育儿,这个姿势看起来又很好。
API文档说PoseBone.matrix位于“对象空间”,但从这些测试中我可以清楚地看到,它们相对于父骨架。
应用约束和驱动程序后的最终4x4矩阵(对象空间)
我试着做这样的事:
matrix_basis = ... # matrix from file
animation_matrix = matrix_basis * (pose.bones['mybone'].matrix.copy() * pose.bones[bonename].bone.parent.matrix_local.copy().inverted())
pose.bones[bonename].matrix = animation_matrix但看起来更糟。做了操作顺序的实验,没有任何运气。
作为记录,在旧的2.4API中,这起作用就像一种魅力:
matrix_basis = ... # matrix from file
animation_matrix = armature.bones['mybone'].matrix['ARMATURESPACE'].copy() * matrix_basis
pose.bones[bonename].poseMatrix = animation_matrix
pose.update()链接到搅拌机API参考:
17/bpy.types.BlendData.html#bpy.types.BlendData
17/bpy.types.PoseBone.html#bpy.types.PoseBone
回答 1
Stack Overflow用户
发布于 2012-08-22 06:23:02
“目标空间”可能意味着相对于父母的骨骼。您可以通过乘以父转换矩阵的逆来将全局转换为局部。您还可能会发现,您希望通过所有父逆转换的级联来乘以:乘B1 *逆(B0)和B2 *(逆(B1)*逆(B0))。
下面是一些执行类似操作的示例代码(在Panda3D中,不是Blender,而是相同的一般想法)。我们从具有全局位置和旋转值的3根骨头开始,将它们放在一起,并将全局坐标转换为正确的局部矩阵。
# Load three boxes ('bones'), give them global position and rotation
# each is 3 units long, at a 30 degree angle.
self.bone1=loader.loadModel("box.egg")
self.bone1.reparentTo(render)
self.bone2=loader.loadModel("box.egg")
self.bone2.reparentTo(self.bone1)
self.bone3=loader.loadModel("box.egg")
self.bone3.reparentTo(self.bone2)
'''
equivalent code, in local coordinates
self.bone1.setPos(0,0,0)
self.bone1.setHpr(0,0,30)
self.bone2.setPos(0,0,3)
self.bone2.setHpr(0,0,30)
self.bone3.setPos(0,0,3)
self.bone3.setHpr(0,0,30)
'''
# give each a global rotation value
R1=Mat4()
R1.setRotateMat(30,Vec3(0,1,0))
R2=Mat4()
R2.setRotateMat(60,Vec3(0,1,0))
R3=Mat4()
R3.setRotateMat(90,Vec3(0,1,0))
# set global translation values
T1=Mat4()
# position of bone 2 in global coords
T2 = Mat4.translateMat(1.271,0,2.606)
# position of bone 3 in global coords
T3 = Mat4.translateMat(3.782,0,4.036)
# set the matrix for bone 1
M1 = R1 * T1
self.bone1.setMat(M1)
# get inverse of matrix of parent
I1 = Mat4()
I1.invertFrom (M1)
# multiply bone2 matrix times inverse of parent
M2 = R2 * T2
M2 = M2 * I1
self.bone2.setMat(M2)
# get inverse of parent for next bone
I2 = Mat4()
I2.invertFrom(M2)
M3 = R3 * T3
# notice that M3 * I2 isn't enough - needs to be M3 * (I1 * I2)
M3 = M3 * (I1 * I2)
self.bone3.setMat(M3)https://stackoverflow.com/questions/11722391
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号