
在四元数结果中,轴的Euler序列是否干扰?
这件事让我很困惑。我知道,当你使用欧拉角和应用旋转对象,你必须坚持一个轴序列,例如,XYZ,以避免万向节锁定。我的问题正好相反。
假设我有四元数,我想要转换成欧拉角。所以,我把所有的四元数转换成一个旋转序列,在我的物体的三轴上应用。
以下是问题:
- 如果我遵循像所示的在这个维基百科页面那样的转换,我会在所有三个轴上得到从-PI到PI的角度吗?
- 现在我有了角度,我如何知道我应该应用于对象的顺序?
- 维基百科的这个公式是否意味着我必须使用一个特定的轴转换序列作为XYZ或其他什么?
- 对于不同的轴序有不同的公式吗?
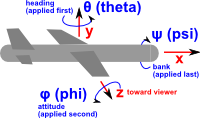
我要找的是转换成航空符号序列的公式(见图)。
我的数学有点生疏,所以请不要在数学上过于深奥。
提前谢谢。
回答 1
Stack Overflow用户
发布于 2011-03-03 01:53:55
我知道,当你使用欧拉角和应用旋转对象,你必须坚持一个轴序列,例如,XYZ,以避免万向节锁定。
这并不完全正确。你不仅要坚持一个特定的轴序,你还必须坚持一个特定的参考框架的旋转。你通常会听到身体固定的旋转和全局固定的旋转(两者的区别主要是关于初等旋转被乘以的顺序) BTW,当你使用四元数时,你会得到同样的问题。欧拉角是一个旋转表示族,基本上有12个独特的初等旋转序列,你可以这样做来实现最终的旋转矩阵。加上两个可能的参照系,给出了24种可能的表示,它们都被称为"Euler Angles“(尽管12是多余的)。你发现的最常见的版本是"3-2-1身体固定“和"1-2-3全局”(这是相同的),"1-2-3身体固定“(逆序列),"3-1-3身体固定”(非常多地用于机器人),最后是Tait-Bryan (“1-(减掉)2-3全局固定”或“滚动-俯仰-偏航”)。你必须坚持一次会议。
维基百科在这个问题上是不可信的(尝试一下“数学世界”,或者一本真正的教科书)。在您所链接的页面上,公式对应于"1-2-3体固定“(至少有这样的说法)。
最后,“万向节锁”是永远无法避免的,它们是任何欧拉角惯例所固有的,它们是不可避免的。如果你有一本数学课本,你可以读到为什么会这样。
如果我遵循像这个维基百科页面所示的转换,我会在所有三个轴上得到从-2PI到2PI的角度吗?
不,你会得到两个角度范围从-Pi到Pi,和一个角度从-Pi/2到Pi/2 (同样,这将是所有的惯例)。对于wiki公式,您将得到-Pi中的Phi,Pi,Theta in - Pi /2,Pi/2,以及-Pi,Pi中的Psi。
现在我有了角度,我如何知道我应该应用于对象的顺序?
对于"1-2-3体固定“,它首先是x,然后是y,然后是z,因为它是体固定的,所以旋转矩阵的顺序实际上是Rx Ry Rz。生成的矩阵可用于与矢量进行预乘,向量的分量表示在旋转物体的坐标系中,并转换为以“全局”坐标框架表示的分量。
对于不同的轴序有不同的公式吗?
是的,当然。每个惯例都有不同的公式。这就是为什么,在某些应用中,人们喜欢不同的约定,因为他们可以排序-避免接近奇异点,这些奇点对应于转换方程中的数学奇点。约定有不同的奇点,如果系统中有特定的几何图形,有时可以利用(并避免)这些奇点。
我的数学有点生疏,所以请不要在数学上过于深奥。
希望我没有..。但是3D旋转并不是最容易的话题。它们有时会变得很混乱,你应该小心地去做。根据我的经验,您最好一直坚持使用四元数(需要时偶尔使用旋转矩阵)。
https://stackoverflow.com/questions/5175498
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号