
opengl查找矩阵到摄像机外部矩阵
我试图从opengl框架缓冲区中保存的深度数据来渲染三维点云。基本上,对于以(0,0,0)为中心的呈现模型,我从不同的n视点(已经知道)获取了不同的深度样本。我成功地保存了深度映射,但是现在我想从这些深度映射中提取出x,y,z。为此,我回到了从图像到世界的投影点。要获得世界坐标,我使用下面的方程P = K_inv R|t_inv * p.来计算世界坐标。
为了计算图像的本质矩阵,我使用了来自opengl摄像机矩阵的信息,glm::(fov,aspect,near_plane,far_plane)。计算了本征矩阵K

where 
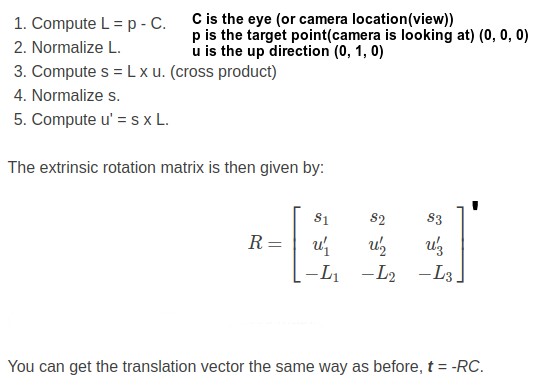
如果对相机原点坐标进行变换(即没有外部变换R~t),就可以得到单个图像的三维模型。为了融合多个深度映射,我还需要从OpenGL查找矩阵center=(0,0,0),up=(0,1,0)中计算外部变换。外部矩阵的计算如下(参考文献:http://ksimek.github.io/2012/08/22/extrinsic/ )
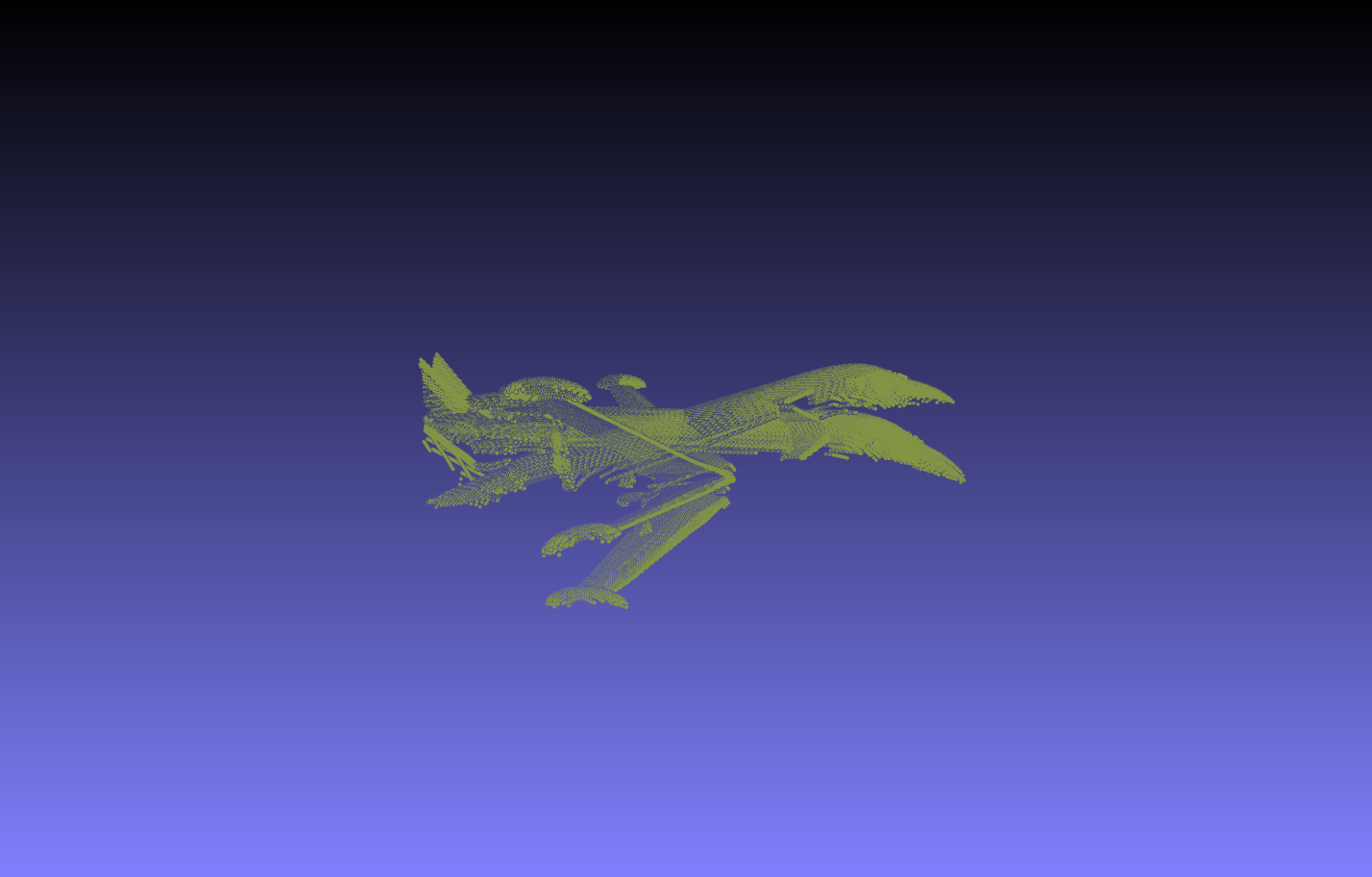
但是当我融合两幅深度图像时,它们是不对齐的。我认为外在矩阵是不正确的。我还尝试直接使用glm::lookat矩阵,但这也不起作用。融合模型快照如下所示
有人能告诉我我的方法出了什么问题吗。它是外部矩阵是错误的(这我他妈的是肯定的)?
回答 1
Stack Overflow用户
发布于 2021-01-14 00:50:39
最后,我自己解决了这个问题。我没有在OpenGL中进行转换,而是在OpenGL之外进行了转换。基本上,我保持相机不变,离模型有一段距离,然后对模型进行旋转变换,然后在没有查找矩阵(或仅4x4恒等矩阵)的情况下渲染模型。我不知道为什么使用查找矩阵没有给我结果,或者可能是因为我错过了什么。为了将模型倒置到世界坐标中,我只需取我最初向OpenGL输入模型之前所做的精确转换的逆变换即可。
https://stackoverflow.com/questions/65554958
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号