
带有附加边界的三维MATLAB曲线拟合
Introduction
假设我有一组实验数据,需要找到一个多项式近似,来描述所选的序列。实验结果取决于时间和浓度两个变量。让这些示例性数据看起来如下:
Experiment=[1.5 0.2 0.4 0.4 0.2 0.2 2.0 0.2 0.4 0.4 0.2 0.2];
Time=[0 5 10 0 5 10 0 5 10 0 5 10];
Concentration=[0 0 0 1 1 1 2 2 2 3 3 3];多项式可以很容易地拟合和绘制如下:
Time = transpose(Time);
Concentration = transpose(Concentration);
Experiment= transpose(Experiment);
f1 = fit( [Time, Concentration], Experiment, 'poly23' );
pl=plot(f1, [Time, Concentration], Experiment);问题
上面描述的简单过程是非常好的,并给出了一个多项式图:
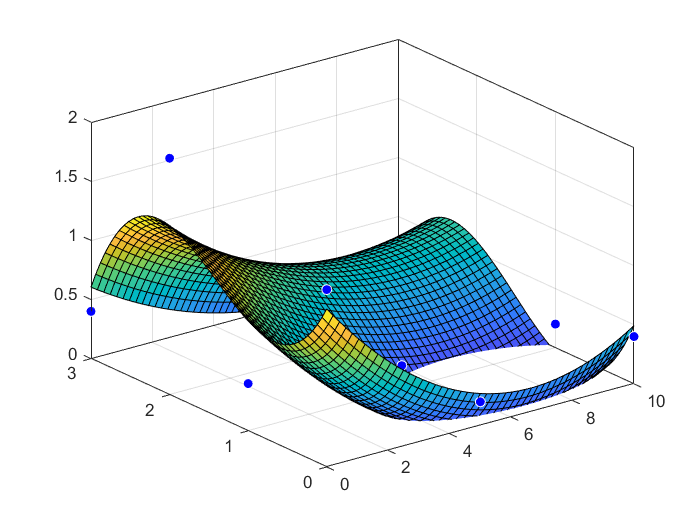
当时间为4-10,浓度小于1时,多项式结果为负。我正在调查的系统是生物学的。所以任何负值在物理上都是不可能的。因此,我的问题是:如何设置任何边界/约束,以防止在实验范围内产生的多项式为负值?如何强迫MATLAB给我近似,当时间在0到10之间,浓度在0到3之间时,它总是给出Z>0?
回答 1
Stack Overflow用户
发布于 2019-10-18 19:37:02
对于使用fmincon进行的非线性约束优化,首先需要定义一个确定z的函数(即预测x和y的结果):
function z = poly_model(x, y, p)
% extract parameters
p00 = p(1);
p10 = p(2);
p01 = p(3);
p20 = p(4);
p11 = p(5);
p02 = p(6);
p21 = p(7);
p12 = p(8);
p03 = p(9);
% poly23 model
z = p00 + p10 .* x + p01 .* y + p20 .* x.^2 + p11 .* x .* y + ...
p02 .* y.^2 + p21 .* x.^2 .* y + p12 .* x .* y.^2 + p03 .* y.^3;
end请注意,所有乘法和幂都是按元素进行的(.*和.^)。这允许计算x和y的矩阵输入函数,这是计算要在实验数据范围内施加的约束所必需的。
约束已在单独的函数中定义。从医生那里:
非线性约束,指定为函数句柄或函数名称。nonlcon是一个函数,它接受向量或数组x,并返回两个数组,c(x)和ceq(x)。
- c(x)是在x.fmincon试图满足的非线性不等式约束的数组。
c(x) <= 0对于c.
- ceq(x)的所有条目都是在x.fmincon试图满足的非线性等式约束的数组。
对于ceq的所有条目,ceq(x) =0。因此,在您的示例中,约束函数可以定义为:
function [c, ceq] = constraint_eq(x, y, p)
% evaluate the model for required x and y
z_model = poly_model(x, y, p);
% and constrain z to be positive:
c = -z_model; % z_model >= 0, c(p) <= 0, hence c = -z_model
% no inequality constraint needed
ceq = [];
end接下来,您需要定义一个优化函数,以最小化实验数据与模型预测之间的误差:
function err = cost_function(x, y, z, p)
z_model = poly_model(x, y, p); % determine model prediction z for x and y
ev = z_model - z; % error vector
err = norm(ev, 2)^2; % sum of squared error
end最后,调用fmincon例程:
clc
clear
close all
% data
Experiment = [1.5 0.2 0.4 0.4 0.2 0.2 2.0 0.2 0.4 0.4 0.2 0.2];
Time = [0 5 10 0 5 10 0 5 10 0 5 10];
Concentration = [0 0 0 1 1 1 2 2 2 3 3 3];
% short notation for readability
x = Time;
y = Concentration;
z = Experiment;
% define XV and YV to fulfil constraint over the entire x and y domain
xv = linspace(min(x), max(x), 20);
yv = linspace(min(y), max(y), 20);
[XV, YV] = meshgrid(xv, yv);
% initial guess parameters?
p0 = rand(9, 1);
p_final = fmincon(@(p) cost_function(x, y, z, p), p0, [], [], [], [], [], [], @(p) constraint_eq(XV, YV, p));
%% check result:
ZV = poly_model(XV, YV, p_final); % evaluate points in poly23 plane
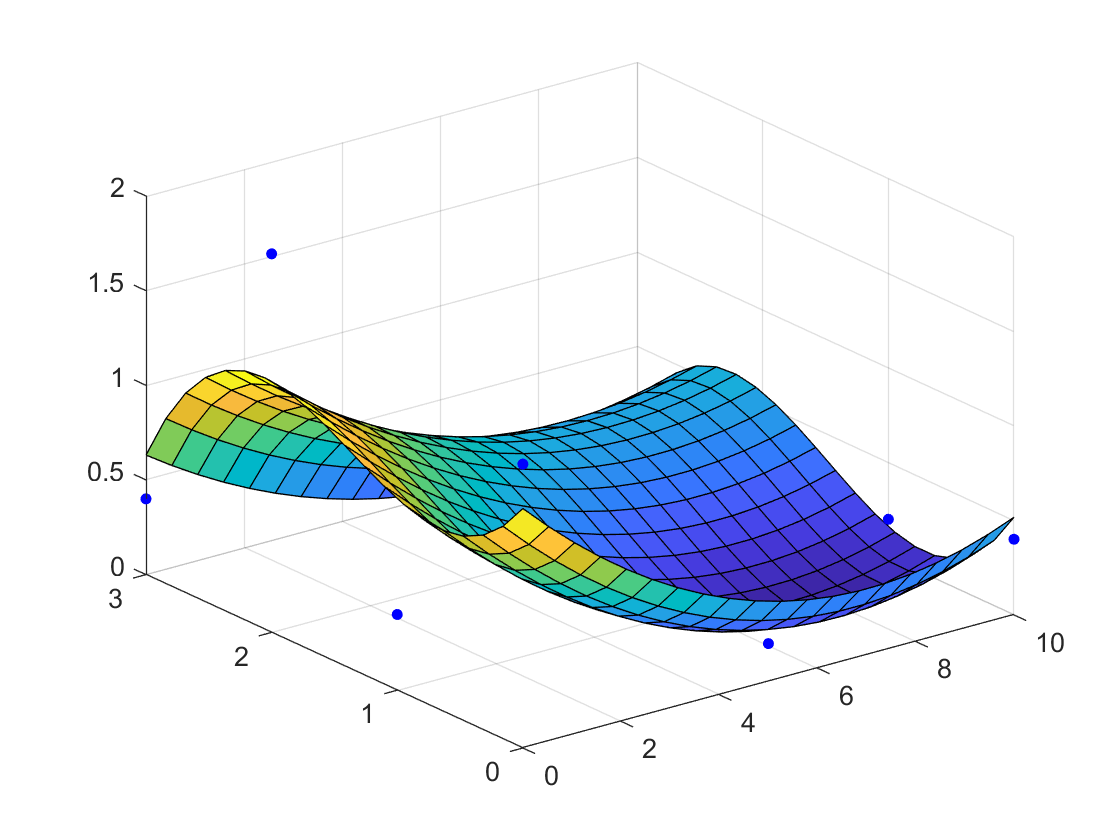
% plot result
figure(1); clf;
scatter3(x, y, z, 200, 'b.');
hold on;
surf(XV, YV, ZV)
初始参数p0对的影响
正如@James在评论中指出的那样,您也可以使用无约束优化的解决方案作为约束优化的起点。对于所提供的实验数据和选择的模型,您将看到并没有真正的区别:
% The random initial guess:
p0 = rand(9, 1);
% Optimal solution for random p0
p_rand = fmincon(@(p) cost_function(x, y, z, p), p0, [], [], [], [], [], [], @(p) constraint_eq(XV, YV, p));
% first running unconstrained optimization and use p_unc
% as start point for constrained optimization
p_unc = fmincon(@(p) cost_function(x, y, z, p), p0, [], []);
p_con= fmincon(@(p) cost_function(x, y, z, p), p_unc, [], [], [], [], [], [], @(p) constraint_eq(XV, YV, p));
% Compare errors:
SSE_unc = cost_function(x,y,z,p_unc)
SSE_con = cost_function(x,y,z,p_con)
SSE_rand = cost_function(x,y,z,p_rand)
% compare poly23 parameters
p_all = [p_unc, p_con, p_rand]这将使:
SSE_unc =
1.0348
SSE_con =
1.1889
SSE_rand =
1.1889
p_all =
1.3375 1.2649 1.2652
-0.3425 -0.2617 -0.2618
-1.6069 -1.0620 -1.0625
0.0258 0.0187 0.0187
0.0175 -0.0018 -0.0016
1.5708 1.0717 1.0721
-0.0042 -0.0018 -0.0018
0.0125 0.0094 0.0094
-0.3722 -0.2627 -0.2628在这种情况下,您可以看到所找到的参数之间有很小的差别,但是很可能求解程序需要更少的迭代才能得到这个解决方案。通过调整求解器设置(最优性、容差和约束容限),p_rand和p_con的解决方案将更加接近。
通常,检查多个随机初始猜测是很好的做法,以确保没有找到局部最小值(例如使用MultiStart)。
https://stackoverflow.com/questions/58453956
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号