
使用vips逐行比较图像
背景:我有图像,我需要比较的差异。这些图像很大(大约为1400x9000 px)、机器生成的和高度受限的(特定线性用户界面的截图),预计它们几乎是相同的,区别是以下三种可能性之一:
- 图1有一个区段,缺少图像2。
- 图1缺少图像2所包含的部分
- 这两个图像都有给定的部分,但其内容不同。
我正在尝试构建一个工具来突出人类审查员的不同之处,本质上是一个面向行的差异的图像版本。为了达到这个目的,我尝试逐行扫描图像,并比较它们,以确定它们是否相同。我的最终目标是一个实际的差别化输出,它可以检测出缺失/添加/不同的部分,并为相同内容的其余部分尽快同步图像,但对于第一个剪切,我将采用一种更简单的方法,即两幅图像被覆盖(alpha混合),以及以特定颜色突出显示的不同线条(即。阿尔法-混合第三行固体颜色)。起初,我尝试使用Python,但这太慢了好几个数量级,所以我决定尝试使用vips,这应该要快得多。但是,我完全不知道如何表达我在使用vips操作之后要做的事情。较简单版本的伪代码实质上是:
out = []
# image1 and image2 are expected, but not guaranteed to have the same height
# they are likely to have different heights if different
# most lines are entirely white pixels
for line1, line2 in zip(image1, image2):
if line1 == line2:
out.append(line1)
else:
# ALL_RED is a line composed of solid red pixels
out.append(line1.blend(line2, 0.5).blend(ALL_RED, 0.5))我在我的项目中使用pyvips,但我也对使用普通vips或任何其他绑定的代码感兴趣,因为这些操作是共享的,并且很容易跨方言进行翻译。
编辑:根据请求添加示例图像
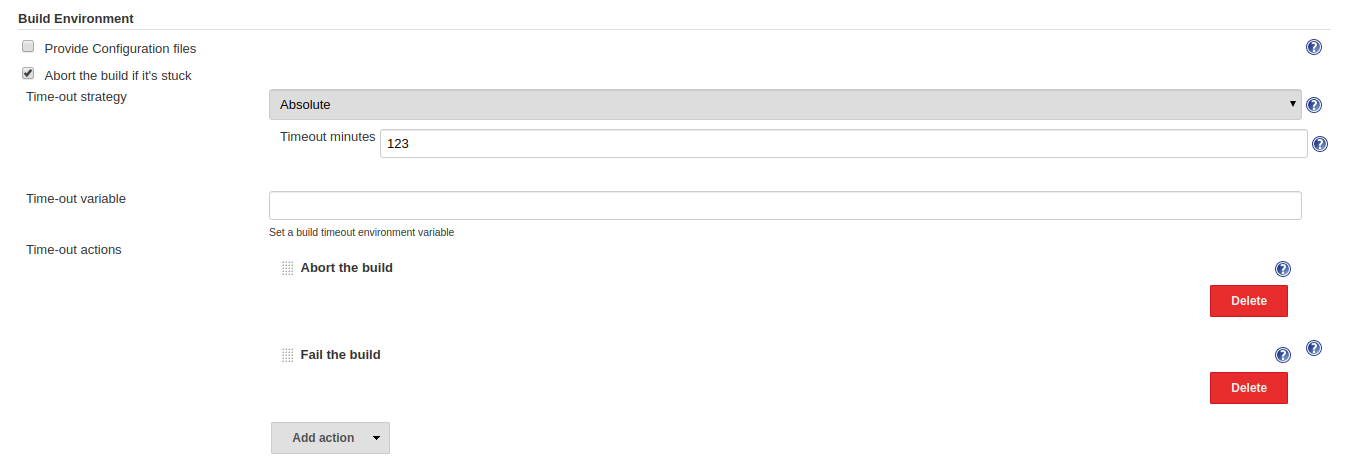
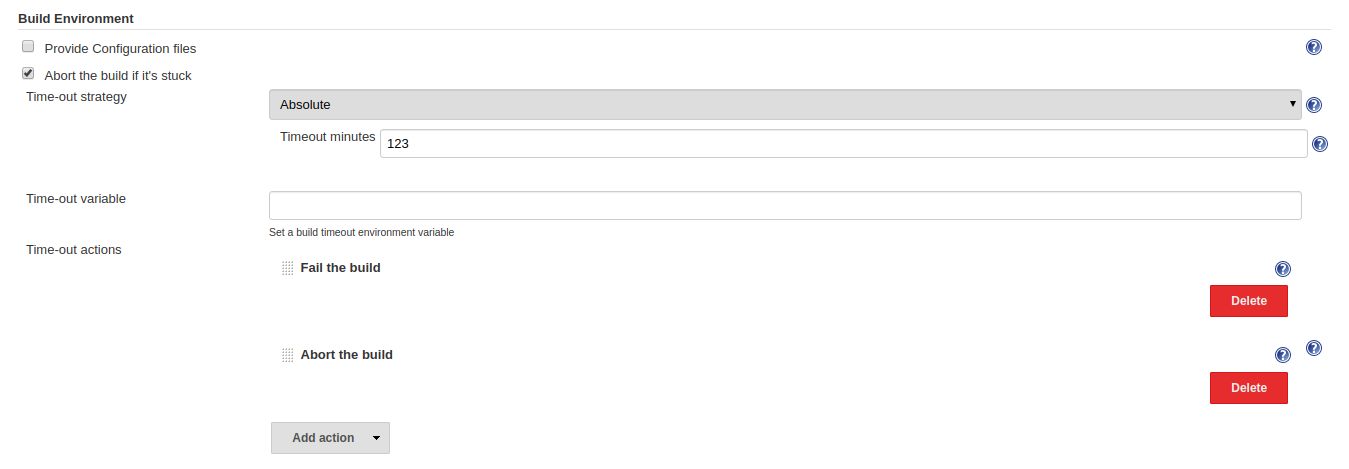
编辑2:缺少/添加/更改部分的全尺寸图像:
{kind=link}
{kind=link}
回答 2
Stack Overflow用户
发布于 2019-10-22 08:51:33
就用迪夫怎么样?挺快的。您所需要做的就是将您的PNG转换为文本,每次扫描,然后解析diff输出。
例如:
#!/usr/bin/env python3
import sys
import os
import re
import pyvips
# calculate a checksum for each scanline and write to name_out
def scanline_checksum(name_in, name_out):
a = pyvips.Image.new_from_file(name_in, access="sequential")
# unfold colour channels to make a wider 1-band image
a = a.bandunfold()
# xyz makes an index image, where the value of each pixel is its coordinate
b = pyvips.Image.xyz(a.width, a.height)
# make a pow gradient image ... each pixel is some power of the x coordinate
b = b[0] ** 0.5
# now multiply and sum to make a checksum for each scanline
# "project" returns sum of columns, sum of rows
sum_of_columns, sum_of_rows = (a * b).project()
sum_of_rows.write_to_file(name_out)
to_csv(sys.argv[1], "1.csv")
to_csv(sys.argv[2], "2.csv")
os.system("diff 1.csv 2.csv > diff.csv")
for line in open("diff.csv", "r"):
match = re.match("(\\d+),(\\d+)c(\\d+),(\\d+)", line)
if not match:
continue
print(line)对于您的两个测试图像,我看到:
$ time ./diff.py 1.png 2.png
264,272c264,272
351,359c351,359
real 0m0.346s
user 0m0.445s
sys 0m0.033s在这台老笔记本电脑上。您所需要做的就是使用这些“更改”命令来标记您的图像。
Stack Overflow用户
发布于 2019-10-22 08:09:11
如果OpenCV和NumPy是您的选项,那么至少有一个非常简单的解决方案,用于查找和着色不同的行。
在我的方法中,我只使用np.abs计算像素级的差异,用np.nonzero查找非零行索引。使用这些已找到的行索引,我设置了一个额外的黑色图像,并为每一行绘制了红线。最后的混合只是一些线性混合:
0.5 * image1 + 0.5 * image2对于所有相等的行,或
0.333 * image1 + 0.333 * image2 + 0.333 * red所有不同的行。
下面是最后的代码:
import cv2
import numpy as np
# Load images
first = cv2.imread('9gOlq.png', cv2.IMREAD_COLOR)
second = cv2.imread('1Hdx4.png', cv2.IMREAD_COLOR)
# Calcluate absolute differences between images
diff = np.abs(np.float32(first) - np.float32(second))
# Find all non-zero rows
nz_rows = np.unique(np.nonzero(diff)[0])
# Set up image with red lines
red = np.zeros(first.shape, np.uint8)
red[nz_rows, :, :] = [0, 0, 255]
# Set up output image
output = np.uint8(0.5 * first + 0.5 * second)
output[nz_rows, :, :] = 0.333 * first[nz_rows, :, :] + 0.333 * second[nz_rows, :, :] + 0.333 * red[nz_rows, :, :]
# Show results
cv2.imshow("diff", np.array(diff, dtype=np.uint8))
cv2.imshow("output", output)
cv2.waitKey()
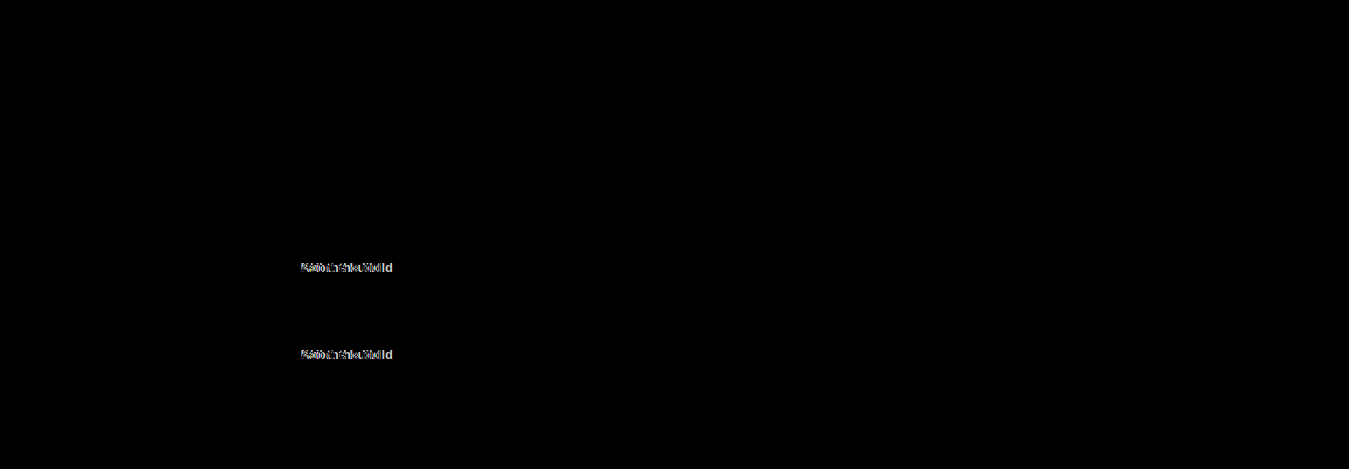
cv2.destroyAllWindows()差异图像diff如下所示:
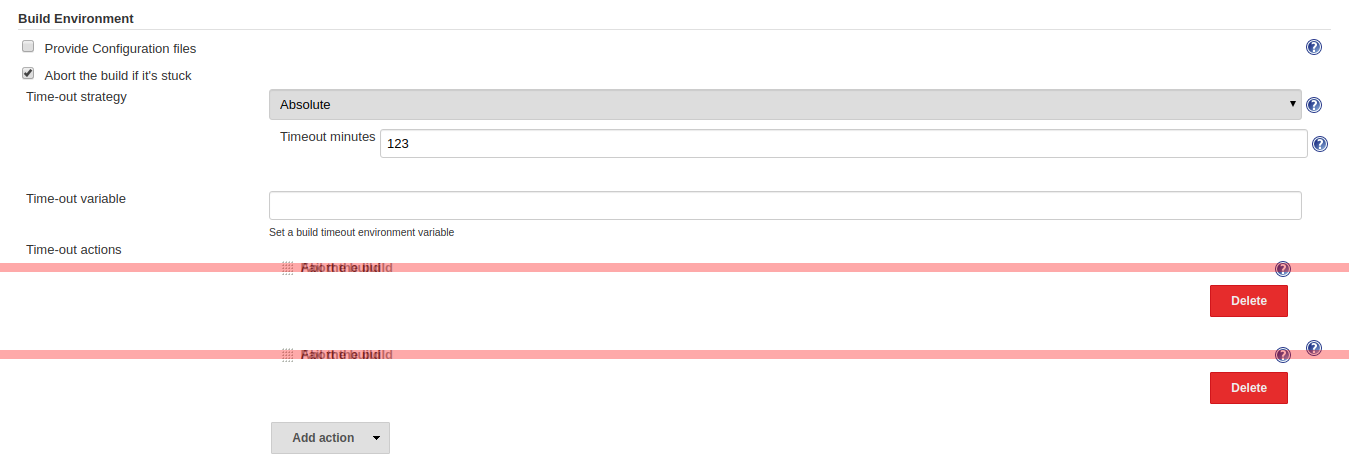
最后一个output看起来如下所示:
正如您在问题中所描述的,如果看到两个输入图像中省略的部分,将会很有趣。此外,使用原始大小的图像测试这种方法是必要的,因为您提到了时间是至关重要的。
不管怎样-希望这能帮上忙!
https://stackoverflow.com/questions/58498151
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号