
检测噪声帧
我有一个FPV (第一人称视图)接收器,显示从安装在无人机上的FPV摄像机接收帧。当发射机工作时,接收器显示相机视图。否则,如果连接丢失或发射机不工作,它将显示噪声帧。
噪声帧具有随机模式(有时具有更多的白色像素,有时具有更多的黑色像素)。我希望在Python中使用OpenCV有效地检测那些噪声帧。我知道OpenCV有一个叫做cv2.fastNlMeansDenoisingColored()的方法。但在这种情况下,我想检测噪声帧,而不是噪音在每个帧。
附件中附有噪声帧的样本:

另一个噪声帧示例:
有效的框架(可以是任何内容):

回答 1
Stack Overflow用户
发布于 2019-11-19 05:55:23
假设您的有效视频帧至少有一定数量的颜色信息,并且您的噪声帧或多或少是黑白的,那么使用来自HSV颜色空间的饱和信道可能是一种简单的方法。
- 将图像转换为HSV颜色空间使用,请参阅
cv2.cvtColor。 - 计算饱和通道的直方图,见
cv2.calcHist。 - 计算具有最小饱和度的像素百分比,比如至少
0.05。 - 如果这个百分比超过一个阈值,比如说
0.5,那么所有像素中至少有50%的饱和度至少为0.05,因此这个帧似乎是一个有效的帧。(必要时调整阈值。)
import cv2
from matplotlib import pyplot as plt
import numpy as np
from skimage import io # Only needed for web grabbing images, use cv2.imread for local images
def is_valid(image):
# Convert image to HSV color space
image = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
# Calculate histogram of saturation channel
s = cv2.calcHist([image], [1], None, [256], [0, 256])
# Calculate percentage of pixels with saturation >= p
p = 0.05
s_perc = np.sum(s[int(p * 255):-1]) / np.prod(image.shape[0:2])
##### Just for visualization and debug; remove in final
plt.plot(s)
plt.plot([p * 255, p * 255], [0, np.max(s)], 'r')
plt.text(p * 255 + 5, 0.9 * np.max(s), str(s_perc))
plt.show()
##### Just for visualization and debug; remove in final
# Percentage threshold; above: valid image, below: noise
s_thr = 0.5
return s_perc > s_thr
# Read example images; convert to grayscale
noise1 = cv2.cvtColor(io.imread('https://i.stack.imgur.com/Xz9l0.png'), cv2.COLOR_RGB2BGR)
noise2 = cv2.cvtColor(io.imread('https://i.stack.imgur.com/9ZPAj.jpg'), cv2.COLOR_RGB2BGR)
valid = cv2.cvtColor(io.imread('https://i.stack.imgur.com/0FNPQ.jpg'), cv2.COLOR_RGB2BGR)
for img in [noise1, noise2, valid]:
print(is_valid(img))可视化输出(按问题中的顺序排列):
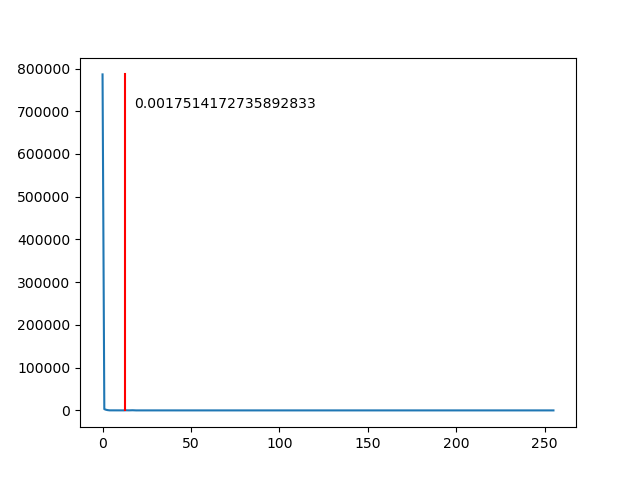
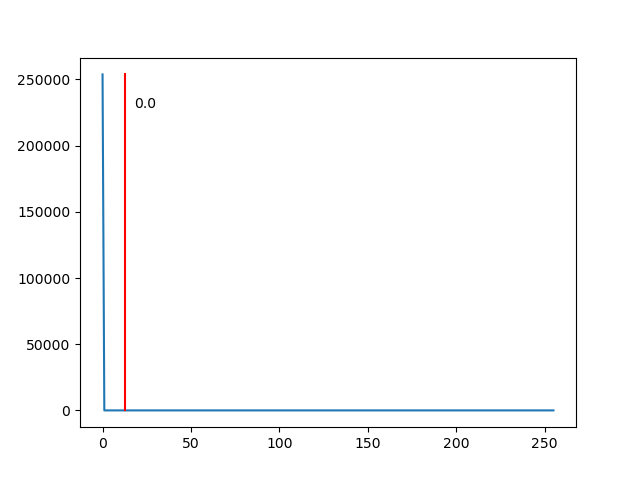
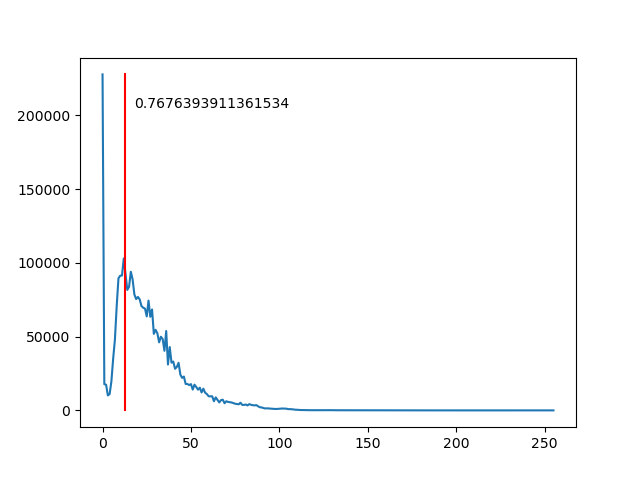
主要产出:
False
False
True除去所有的可视化内容,is_valid调用在我的机器上每个映像所需的时间不到0.01秒。不确定,您在做录音时有哪些硬件,但也许这种方法也适用于一些具有足够帧速率的“实时”处理。
最后一点:我试图去掉OpenCV直方图,直接使用NumPy计算百分比,但这比现在的方法花费了更多的时间。真奇怪。
希望这能帮上忙!
https://stackoverflow.com/questions/58924276
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号