
GEKKO RTO与MPC模式
这是从这个一派生出来的一个问题。在发布了我的问题后,我找到了一个解决方案(更像是一个补丁来强制优化器进行优化)。有件事让我很困惑。约翰·赫登格伦正确地指出,ODE中的b=1.0会导致IMODE=6不可行的解决方案。然而,在我与IMODE=3的杂乱无章的工作中,我确实得到了一个解决方案。
我试图了解这里发生了什么,阅读盖科氏文档中的IMODE=3和6,但对我来说还不清楚
IMODE=3
RTO实时优化(RTO)是一种稳态模式,它允许决策变量(带有STATUS=1的FV或MV类型)或附加变量超过方程数。目标函数指导附加变量的选择,以选择最优可行解。如果没有指定m.options.IMODE,RTO是Gekko的默认模式。
IMODE=6
MPC模型预测控制(MPC)是以IMODE=6作为同步解决方案,IMODE=9作为顺序射击方法实现的。
为什么b=1.在一种模式下工作,而不是在另一种模式下工作?
这是我与IMODE=3和b=1.0的杂乱无章的工作
from gekko import GEKKO
import numpy as np
import matplotlib.pyplot as plt
m = GEKKO(remote=False)
m.time = np.linspace(0,23,24)
#initialize variables
T_e = [50.,50.,50.,50.,45.,45.,45.,60.,60.,63.,\
64.,45.,45.,50.,52.,53.,53.,54.,54.,53.,52.,51.,50.,45.]
temp_low = [55.,55.,55.,55.,55.,55.,55.,68.,68.,68.,68.,55.,55.,68.,\
68.,68.,68.,55.,55.,55.,55.,55.,55.,55.]
temp_upper = [75.,75.,75.,75.,75.,75.,75.,70.,70.,70.,70.,75.,75.,\
70.,70.,70.,70.,75.,75.,75.,75.,75.,75.,75.]
TOU = [0.05,0.05,0.05,0.05,0.05,0.05,0.05,200.,200.,\
200.,200.,200.,200.,200.,200.,200.,200.,200.,\
200.,200.,200.,0.05,0.05,0.05]
b = m.Param(value=1.)
k = m.Param(value=0.05)
u = [m.MV(0.,lb=0.,ub=1.) for i in range(24)]
# Controlled Variable
T = [m.SV(60.,lb=temp_low[i],ub=temp_upper[i]) for i in range(24)]
for i in range(24):
u[i].STATUS = 1
for i in range(23):
m.Equation( T[i+1]-T[i]-k*(T_e[i]-T[i])-b*u[i]==0.0 )
m.Obj(np.dot(TOU,u))
m.options.IMODE = 3
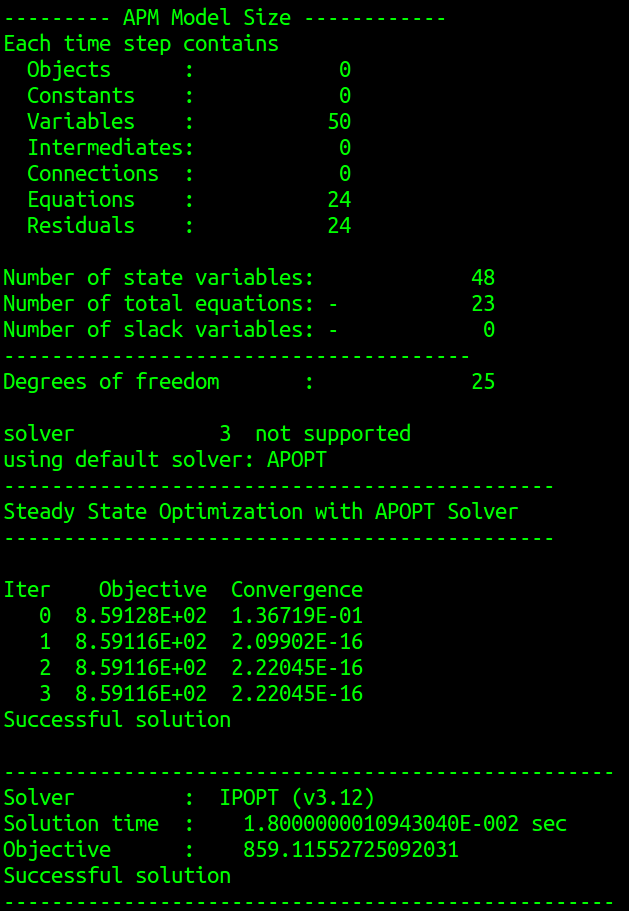
m.solve(debug=True)
myu =[u[0:][i][0] for i in range(24)]
print myu
myt =[T[0:][i][0] for i in range(24)]
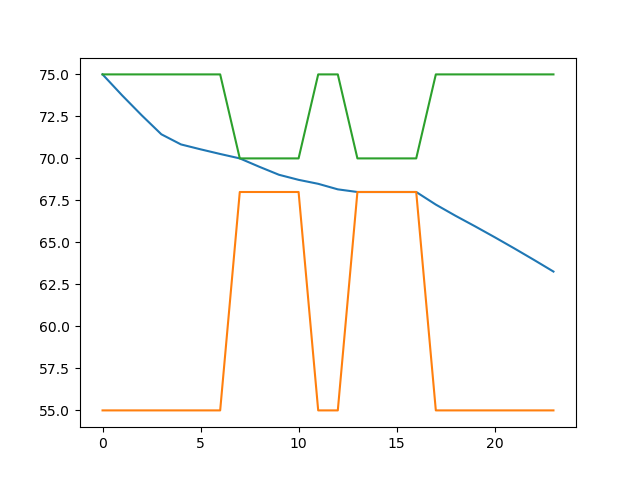
plt.plot(myt)
plt.plot(temp_low)
plt.plot(temp_upper)
plt.show()
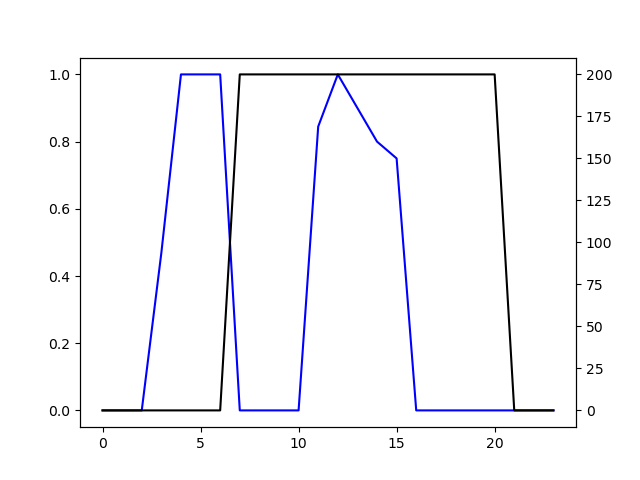
fig, ax1 = plt.subplots()
ax2 = ax1.twinx()
ax1.plot(myu,color='b')
ax2.plot(TOU,color='k')
plt.show()结果:
回答 1
Stack Overflow用户
发布于 2020-03-20 12:43:55
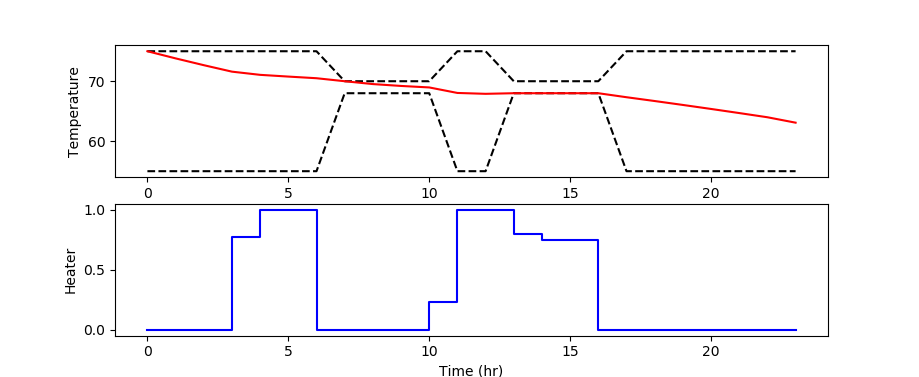
不可行IMODE=6与可行IMODE=3的区别在于,IMODE=3情况允许优化器调整温度初始条件。优化器认识到初始条件可以改变,因此它将其修改为75,这样既可以保持可行,又可以最大限度地减少未来的能耗。
from gekko import GEKKO
import numpy as np
m = GEKKO(remote=False)
m.time = np.linspace(0,23,24)
#initialize variables
T_external = [50.,50.,50.,50.,45.,45.,45.,60.,60.,63.,\
64.,45.,45.,50.,52.,53.,53.,54.,54.,\
53.,52.,51.,50.,45.]
temp_low = [55.,55.,55.,55.,55.,55.,55.,68.,68.,68.,68.,\
55.,55.,68.,68.,68.,68.,55.,55.,55.,55.,55.,55.,55.]
temp_upper = [75.,75.,75.,75.,75.,75.,75.,70.,70.,70.,70.,75.,\
75.,70.,70.,70.,70.,75.,75.,75.,75.,75.,75.,75.]
TOU_v = [0.05,0.05,0.05,0.05,0.05,0.05,0.05,200.,200.,200.,200.,\
200.,200.,200.,200.,200.,200.,200.,200.,200.,200.,0.05,\
0.05,0.05]
b = m.Param(value=1.)
k = m.Param(value=0.05)
T_e = m.Param(value=T_external)
TL = m.Param(value=temp_low)
TH = m.Param(value=temp_upper)
TOU = m.Param(value=TOU_v)
u = m.MV(lb=0, ub=1)
u.STATUS = 1 # allow optimizer to change
# Controlled Variable
T = m.SV(value=75)
m.Equations([T>=TL,T<=TH])
m.Equation(T.dt() == k*(T_e-T) + b*u)
m.Minimize(TOU*u)
m.options.IMODE = 6
m.solve(disp=True,debug=True)
import matplotlib.pyplot as plt
plt.subplot(2,1,1)
plt.plot(m.time,temp_low,'k--')
plt.plot(m.time,temp_upper,'k--')
plt.plot(m.time,T.value,'r-')
plt.ylabel('Temperature')
plt.subplot(2,1,2)
plt.step(m.time,u.value,'b:')
plt.ylabel('Heater')
plt.xlabel('Time (hr)')
plt.show()如果你再去一天(48小时),你可能会发现这个问题最终是不可行的,因为较小的加热器b=1将无法满足温度较低的限制。
使用IMODE=6的优点之一是您可以编写微分方程而不是自己进行离散化。对于IMODE=3,对微分方程使用欧拉方法。IMODE>=4的默认离散化是NODES=2,相当于欧拉有限差分法。设置NODES=3-6可以提高有限元上的正交配置的准确性。
https://stackoverflow.com/questions/60772432
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号