
使用pcl::CropBox筛选器处理点云后,无法将已裁剪的点云可视化
使用pcl::CropBox筛选器处理点云后,无法将已裁剪的点云可视化
提问于 2020-08-11 23:52:03
我一直在尝试理解pcl::CropBoX过滤器,这就是为什么我一直在试验它。然而,在这样做的同时,我发现了这个问题:
我正在创建一个点云,它有一个立方体shape
- Visualizing it
- ,使用
pcl::CropBoxfilter
- 裁剪原始点云,试图可视化裁剪后的点云
但是,在可视化工具中,对于步骤4,我只能看到一个空白的屏幕!
这是我的代码,main.cpp
#include <iostream>
#include <string>
#include <vector>
#include <pcl/ModelCoefficients.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/filters/extract_indices.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/common/common.h>
#include <pcl/filters/crop_box.h>
int main()
{
pcl::PointCloud<pcl::PointXYZRGB>::Ptr
main_cloud_ptr(new pcl::PointCloud<pcl::PointXYZRGB>),
cropped_cloud_ptr(new pcl::PointCloud<pcl::PointXYZRGB>);
// setting the dimension of a point cloud
float x_start = 0.25, x_end = 1.25, x_resolution = 0.05;
float y_start = 0.5, y_end = 2.0, y_resolution = 0.05;
float z_start = 0.0, z_end = 1.25, z_resolution = 0.05;
pcl::PointXYZRGB pt;
// generating a point cloud
for (float i = x_start; i < x_end; i += x_resolution)
{
for (float j = y_start; j < y_end; j += y_resolution)
{
for (float k = z_start; k < z_end; k += z_resolution)
{
pt.x = i;
pt.y = j;
pt.z = k;
pt.r = i * 100;
pt.g = 200;
pt.b = j * 100;
main_cloud_ptr->points.push_back(pt);
}
}
}
std::cout << main_cloud_ptr->points.size() << "\n";
// visualizing a main point cloud
pcl::visualization::CloudViewer viewer1("main_cloud_ptr viewer - cube");
viewer1.showCloud(main_cloud_ptr);
while (!viewer1.wasStopped())
{
}
// getting minimum & maximum x, y, and z values of a point cloud
pcl::PointXYZRGB min_pt, max_pt;
pcl::getMinMax3D(*main_cloud_ptr, min_pt, max_pt);
std::cout << "minimum " << min_pt.x << " " << min_pt.y << " " << min_pt.z << "\n";
std::cout << "maximum " << max_pt.x << " " << max_pt.y << " " << max_pt.z << "\n";
// setting pcl::CropBox filter
pcl::CropBox<pcl::PointXYZRGB> box_filter;
box_filter.setMin(Eigen::Vector4f(0.25, 0.5, 0.25, 1.0));
box_filter.setMin(Eigen::Vector4f(1.25, 2.0, 0.75, 1.0));
box_filter.setInputCloud(main_cloud_ptr);
box_filter.filter(*cropped_cloud_ptr);
// visualizing a cropped point cloud
pcl::visualization::CloudViewer viewer2("cropped_cloud_ptr");
viewer2.showCloud(cropped_cloud_ptr);
while (!viewer2.wasStopped())
{
}
return 0;
}我的CMakeLists.txt
cmake_minimum_required(VERSION 3.1.0 FATAL_ERROR)
project(cropbox_experiment)
set(CMAKE_CXX_STANDARD 14)
set(CMAKE_CXX_STANDARD_REQUIRED TRUE)
find_package(PCL 1.3 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (${PROJECT_NAME} main.cpp)
target_link_libraries (${PROJECT_NAME} ${PCL_LIBRARIES})这是main point cloud的输出:
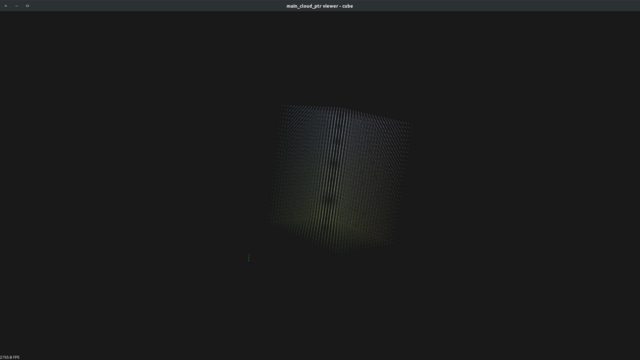
这是cropped point cloud的输出(如您所见,它是空的!):
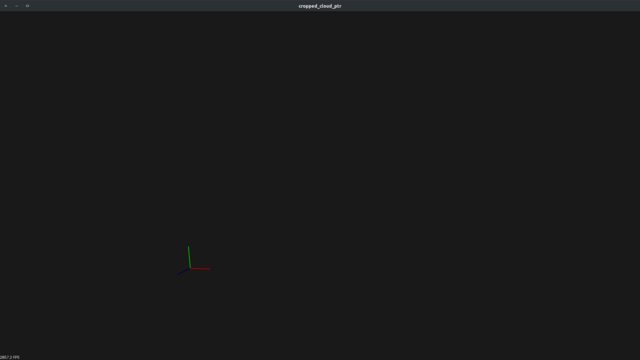
你能告诉我,我在哪里犯了错误,为什么我要得到一个空白输出的裁剪点云?据我所知,maximum和x、y和z轴在pcl::CropBox过滤器的setMin和setMax方法中的值是正确的。
回答 1
Stack Overflow用户
回答已采纳
发布于 2020-08-12 15:31:39
似乎您已经设置了两次Min:
box_filter.setMin(Eigen::Vector4f(0.25, 0.5, 0.25, 1.0));
box_filter.setMin(Eigen::Vector4f(1.25, 2.0, 0.75, 1.0));页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/63367867
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号