
如何获得四面同步的鸟瞰图像?(获取AVM:环视监控)
如何获得四面同步的鸟瞰图像?(获取AVM:环视监控)
提问于 2020-12-16 14:14:11
嗨,我是做avm(周围的视图监控)图像,从四个鱼眼相机获得四个侧面图像。这是AVM的示例图像。
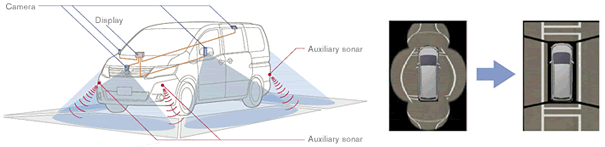
这一过程分为三个部分:
- 校准鱼眼图像/视频/流
- 获取顶部视图(鸟视图)图像
- 通过合成四边图像获得avm图像
我已经完成了1和2部分,但是我在做第三部分时遇到了麻烦。我对它进行了研究,发现它可能与‘缝纫’或'numpy阵列‘有关。但是我不知道怎么做,尽管我读了文档。
4个角重叠存在(脚趾,右上,左下角,右下角).4摄像机固定。我不知道如何合成四个图像,现在的结果图像如下:
{kind=link}
我用np.hstack来制作三视图(左视图、中视图、右视图)(参见birdView)
如果你知道这方面的任何事情,请评论并分享你的想法。
谢谢你的阅读。(我用的是opencv,python,raspberrypi 4B)
代码:
import cv2
import numpy as np
import imutils
from Camera.Undistortion import UndistortFisheye
from Camera.PerspectiveTransformation import EagleView
# from Camera.Stitcher import stitchTwoImages
import time
class avm:
def __init__(self):
self.__leftCamera = UndistortFisheye("left_Camera")
self.__rightCamera = UndistortFisheye("right_Camera")
self.__leftEagle = EagleView()
self.__rightEagle = EagleView()
# self.__frontEagle.setDimensions((149, 195), (439, 207), (528, 380), (37, 374))
# self.__backEagle.setDimensions((164, 229), (469, 229), (588, 430), (45, 435))
#reset left/right setDimensions
self.__leftEagle.setDimensions((186, 195), (484, 207), (588, 402), (97, 363))
self.__rightEagle.setDimensions((171, 240), (469, 240), (603, 452), (52, 441))
# self.__leftEagle.setDimensions((186, 195), (484, 207), (588, 402), (97, 363))
# self.__rightEagle.setDimensions((171, 240), (469, 240), (603, 452), (52, 441))
self.__middleView = None
self.__counter = 0
# self.stitcher = stitchTwoImages("Bottom2Upper")
# self.upper = None
# self.bottom = None
def runAVM(self, leftFrame, rightFrame):
leftView = self.__leftCamera.undistort(leftFrame)
topDown_left = self.__leftEagle.transfrom(leftView)
rightView = self.__rightCamera.undistort(rightFrame)
topDown_right = self.__rightEagle.transfrom(rightView)
# topDown_Back = cv2.flip(topDown_Back, 1) #flip left/right
topDown_left , topDown_right = self.__reScale(topDown_left, topDown_right)
# stitchingResult = self.__startStitching(topDown_Front)
middleView = self.__getMiddleView(topDown_left)
birdView = np.hstack((topDown_left, middleView, topDown_right))
return birdView
def __reScale(self, topDown_left, topDown_right):
width_leftView = topDown_left.shape[1]
width_rightView = topDown_right.shape[1]
height_leftView = topDown_left.shape[0]
height_rightView = topDown_right.shape[0]
if height_leftView > height_rightView:
newHeight = height_rightView
ratio = height_rightView/height_leftView
newWidth = int(ratio * width_leftView)
topDown_left = cv2.resize(topDown_left, (newWidth, newHeight))
else:
newHeight = height_leftView
ratio = height_leftView/height_rightView
newWidth = int(ratio * width_rightView)
topDown_right = cv2.resize(topDown_right, (newWidth, newHeight))
return topDown_left, topDown_right
def __getMiddleView(self, topDown_left):
# the length of the image represents the distance in front or back of the car
width_leftView = topDown_left.shape[1]
if self.__middleView is None:
realWidth_leftView = 13 # unit is cm
realWidth_MiddleView = 29.5 # unit is cm
ratio = int(width_leftView/realWidth_leftView)
width_MiddleView = int(realWidth_MiddleView * ratio)
height_MiddleView = int(topDown_left.shape[0])
self.__middleView = np.zeros((height_MiddleView, width_MiddleView//2, 3), np.uint8)
# print(ratio)
# else:
# # self.__middleView[0:stitchingResult.shape[0], :]
return self.__middleView
# def __startStitching(self, accView):
# if self.bottom is None:
# self.bottom = accView
# return None
# else:
# # time.sleep(0.5)
# self.upper = accView
# self.bottom = self.stitcher.stitch(self.bottom, self.upper)
# cv2.imshow("Result", self.bottom)
# height = accView.shape[0]
# return self.bottom[height:self.bottom.shape[0], :]回答 1
Stack Overflow用户
发布于 2020-12-18 22:01:38
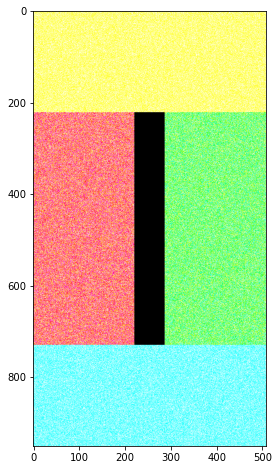
您可以使用hstack和vstack获取正在寻找的awm视图。只需确保个人图像是定向的,以下是我正在创建的随机图像。(必要时使用np.rot90 )
#Assume you have 4 views
leftview = np.random.random((508, 221, 3)) #tall image
rightview = np.random.random((508, 221, 3)) #tall image
frontview = np.random.random((221, 508, 3)) #wide image
backview = np.random.random((221, 508, 3)) #wide image
#Creating color differences to view better.
#IGNORE THIS PART OF CODE
leftview[:,:,0]=1
rightview[:,:,1]=1
frontview[:,:,0:2]=1
backview[:,:,1:3]=1
#Calculate centerview size
width = frontview.shape[1]-(leftview.shape[1]*2)
height = leftview.shape[0]
centerview = np.zeros((height,width,3))
#Hstack the l,c,r views and then Vstack it between the f, b views
lr = np.hstack([leftview,centerview,rightview])
ud = np.vstack([frontview, lr, backview])
#Plot the new image
fig = plt.figure(figsize=(5,8))
plt.imshow(ud)
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/65324957
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号