
即使摄像机工作,ROS ORB_SLAM2 /orb_slam2 2_mono/orb_image也是空白的。
我想用Picamera来绘制地图。我有运行cv_camera_node的Raspberry Pi和运行roscore的Ubuntu20.04.1,以及slam和rviz。我有OpenCV 4.2.0,并安装了以下版本的orb 2:https://github.com/appliedAI-Initiative/orb_slam_2_ros。我在经营罗丝·诺西奇。我为slam编写了以下启动文件:
<launch>
<node name="orb_slam2_mono" pkg="orb_slam2_ros"
type="orb_slam2_ros_mono" output="screen">
<param name="publish_pointcloud" type="bool" value="true" />
<param name="publish_pose" type="bool" value="true" />
<param name="localize_only" type="bool" value="false" />
<param name="reset_map" type="bool" value="true" />
<!-- static parameters -->
<param name="load_map" type="bool" value="false" />
<param name="map_file" type="string" value="map.bin" />
<param name="voc_file" type="string" value="/home/dragonros/catkin_ws/src/orb_slam_2_ros/orb_slam2/Vocabulary/ORBvoc.txt" />
<param name="pointcloud_frame_id" type="string" value="map" />
<param name="camera_frame_id" type="string" value="camera_link" />
<param name="min_num_kf_in_map" type="int" value="5" />
<!-- ORB parameters -->
<param name="/ORBextractor/nFeatures" type="int" value="2000" />
<param name="/ORBextractor/scaleFactor" type="double" value="1.2" />
<param name="/ORBextractor/nLevels" type="int" value="8" />
<param name="/ORBextractor/iniThFAST" type="int" value="20" />
<param name="/ORBextractor/minThFAST" type="int" value="7" />
<!-- Camera parameters -->
<!-- Camera frames per second -->
<param name="camera_fps" type="int" value="30" />
<!-- Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale) -->
<param name="camera_rgb_encoding" type="bool" value="true" />
<!--If the node should wait for a camera_info topic to take the camera calibration data-->
<param name="load_calibration_from_cam" type="bool" value="false" />
<!-- Camera calibration and distortion parameters (OpenCV) -->
<param name="camera_fx" type="double" value="615.546" />
<param name="camera_fy" type="double" value="631.457" />
<param name="camera_cx" type="double" value="354.361" />
<param name="camera_cy" type="double" value="232.799" />
<!-- Camera calibration and distortion parameters (OpenCV) -->
<param name="camera_k1" type="double" value="0.0" />
<param name="camera_k2" type="double" value="0.0" />
<param name="camera_p1" type="double" value="0.0" />
<param name="camera_p2" type="double" value="1.0" />
</node>
</launch>然后运行另一个定制catkin包,它具有以下python脚本:
#!/usr/bin/env python
import rospy
import cv2
from cv_bridge import CvBridge
from sensor_msgs.msg import Image
bridge = CvBridge()
def callback(data):
frame = bridge.imgmsg_to_cv2(data, "bgr8")
cv2.imshow('Video Feed', frame)
cv2.waitKey(1)
rospy.loginfo('Image feed received!')
def listener():
rospy.init_node('vid_rec')
#first parameter is the topic you want to subcribe sensor_msgs/Image from
rospy.Subscriber('/orb_slam2_mono/debug_image', Image, callback)
rospy.spin()
if __name__ == '__main__':
listener()我应该看到一个摄像头的馈送与所有的点,slam检测。但是/orb_slam2_mono/debug_image没有数据。我通过运行rostopic echo /orb_slam2_mono/debug_image来确认这一点。我知道有一个摄像头馈送,因为rviz和rqt_image_viewer都可以显示来自/cv_camera/image_raw的图像。我已经完全遵循了这个指南:https://medium.com/@mhamdaan/implementing-orb-slam-on-ubuntu-18-04-ros-melodic-606e668deffa。有什么问题,我怎么解决呢?
回答 2
Stack Overflow用户
发布于 2021-02-10 19:02:30
也许你的相机没被拿起来。您使用的是cv_camera_node,这意味着默认的主题将是cv_camera,但是orb_slam2只需要摄像头。要解决这个问题,请进入cv_camera_node.cpp,它将如下所示:
// Copyright [2015] Takashi Ogura<t.ogura@gmail.com>
#include "cv_camera/driver.h"
int main(int argc, char **argv)
{
ros::init(argc, argv, "cv_camera");
ros::NodeHandle private_node("~");
cv_camera::Driver driver(private_node, private_node);
try
{
driver.setup();
while (ros::ok())
{
driver.proceed();
ros::spinOnce();
}
}
catch (cv_camera::DeviceError &e)
{
ROS_ERROR_STREAM("cv camera open failed: " << e.what());
return 1;
}
return 0;
}您必须将表示ros::init(argc, argv, "cv_camera");的行更改为这个ros::init(argc, argv, "camera");。重新运行所有的东西,它应该能工作。
Stack Overflow用户
发布于 2021-03-04 18:26:00
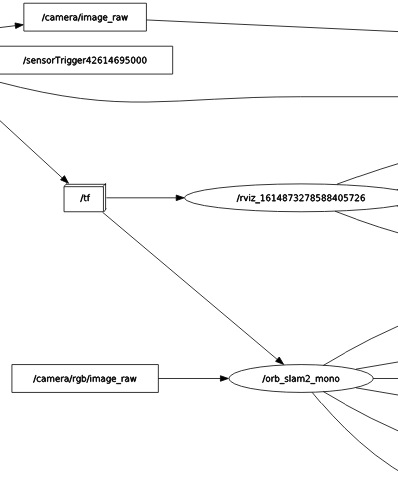
我也遇到了同样的问题,我发现问题发生在启动文件中,它正在将摄像机提要重新映射到错误的ros主题,如果您使用默认的启动文件并打开rqt节点图,您将看到有一个名为camera/rgb/image_raw的浮动主题,而且由于没有人发布该主题,所以轨道same没有读取您的相机提要。要解决这个问题,我所要做的就是从启动文件中删除这一行。
<!-- remove this -->
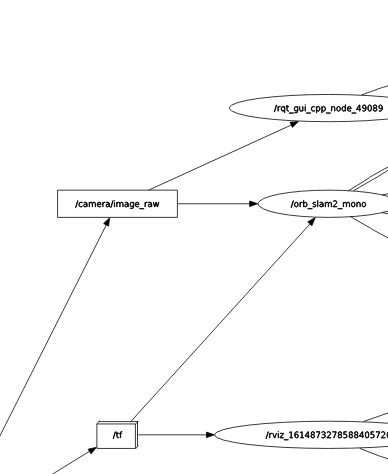
<remap from="/camera/image_raw" to="/camera/rgb/image_raw" />在修复问题之前,ros节点图显示,不是订阅了真正的摄像机镜头,而是订阅了那个/rgb主题,但是在修复之后,它订阅了正确的摄像机主题。
在修复之前
修复后
https://stackoverflow.com/questions/66123837
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号