
如何订阅"/scan“主题,修改消息并将其再次发布到"/scan”主题?
如何订阅"/scan“主题,修改消息并将其再次发布到"/scan”主题?
提问于 2021-09-06 19:42:22
我想通过在传感器上应用一些算法来改进turtlebot3 LDS-01传感器.因此,我的策略是通过订阅“Laserscan.ranges”主题,将该算法应用于Laserscan.ranges,并将其再次发布到“/scan”主题,从而改进和修改Laserscan.ranges的值(即传感器到障碍物之间的距离)。我怎么能做到呢?我脑子里有个想法:
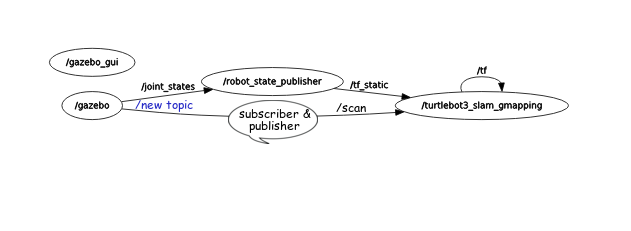
- 创建新主题,将传感器值发布到新主题,订阅新主题并应用算法,最后将其发布到“/scan”主题。但是第一个想法,我找不到发布到“/scan”主题的cpp或python文件。我在哪能找到那份文件?这样我就可以更改代码,将Laserscan.ranges发布到新主题.
。
- 通过将该算法应用于float32范围来修改传感器_msgs/LaserScan。但第二个想法,我不知道它的信息是否可以修改?如果可以,如何修改传感器_msgs/LaserScan应用算法?
最后,如果有任何建议,教程或在线课程,我可以采取与这个问题,我将非常高兴听到。
这张图片是想法1的摘要。
回答 1
Stack Overflow用户
回答已采纳
发布于 2021-09-07 12:59:34
在修改消息之后,您不应该在传感器主题上发布。如果这样做,其他订阅者只会看到修改消息和未修改消息的混合。相反,将其发布到一个单独的主题上,如下所示:
scan_msg_pub = rospy.Publisher('/scan/edited', LaserScan, queue_size=10)
def scan_msg_cb(msg):
#Edit message here
msg.header.frame_id = "new_frame_id" #You can change msg fields like this
scan_msg_pub.publish(msg)
def main():
rospy.Subscriber('/scan', LaserScan, scan_msg_cb)
rospy.spin()
if __name__ == '__main__':
rospy.init_node('scan_edit')
main()页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/69079603
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号