
当尝试使用lidR包在R中生成DSM (数字表面模型)时,我得到了错误:没有找到第一次返回。操作中止
基本上就是标题上说的。我有一个.las三维点云文件,我试图把它转换成R.
我使用这段代码来实现DSM
dsm_2L<- grid_canopy(las = pc, res = 0.1, algorithm = dsmtin())
Error: No first returns found. Operation aborted.我怎么能费劲拍这个来找出它为什么不返回任何价值呢?
回答 1
Stack Overflow用户
发布于 2022-10-23 17:17:40
这些数据是非常可怕的,但是可以用它来做一些事情,我在lidR -这本书中有更多的东西要复习,但是我可以在RGB的地块上四处寻找,
pc_las <- readLAS('~/Downloads/pc.las')
Warning messages:
1: Invalid data: 2266197 points with a return number equal to 0 found.
2: Invalid data: 2266197 points with a number of returns equal to 0 found.
> canopy_p2r <- rasterize_canopy(pc_las, res = 0.1, algorithm = p2r(0.2))
# p2r(0.2) enlarges point to disc, improves result image
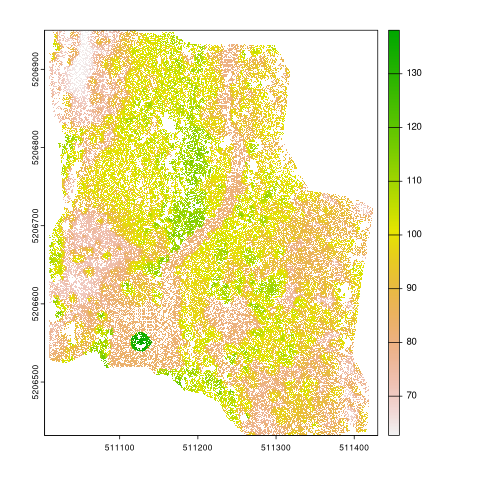
在看plot(pc_las, color= RGB)的时候有个线索。你可以看到一个‘水塔’,但范围说,你不可能看到的。注意研究区域的一个dem的左下角的红色区域。
在这里,点击/挑出canopy_p2r周围的点,形成一个多边形来进行裁剪。
plot(canopy_p2r)
pts <- click(canopy_p2r, n=30, xy = TRUE)
pts_mtx <- as.matrix(pts[, 1:2])
can_poly <- vect(pts_mtx, type= 'polygons', crs = 'EPSG:32610')
can_poly_4326 <- project(can_poly, 'EPSG:4326')
ext(can_poly_4326)
SpatExtent : -122.855230404662, -122.849695629639, 47.0111456525597, 47.0158802976408 (xmin, xmax, ymin, ymax)使用SpatExtent at NASA-EarthData获得一个Aster。注意:键入,不要在‘按矩形选择’中复制/粘贴xmin& etc,因为它们(合理吗?)期待SQL注入,它将反复执行fail...sigh。
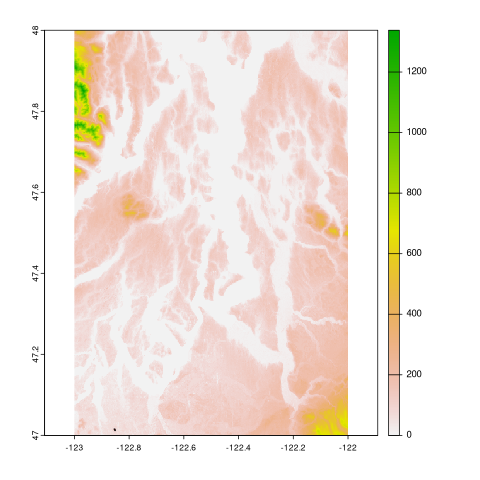
ast_dem <- rast('~/Downloads/ASTGTMV003_N47W123_dem.tif')
# crop ast_dem by can_poly_4326
ast_crop_4326 <- crop(ast_dem, can_poly_4326)
# project this to EPSG:32610
ast_crop_32610 <- project(ast_crop_4326, 'EPSG:32610')
ext(ast_crop_32610)
SpatExtent : 511009.866154932, 511420.434414284, 5206436.81511609, 5206950.02544028 (xmin, xmax, ymin, ymax)看看?lidR::clip_rectangle,我们看到它想要一个与out SpatExtent返回的顺序不同的顺序,但是我们希望尽可能地去除多余的NA。
clip_pc <- clip_rectangle(pc_las, xleft=unname(ext(ast_crop_32610)[c(1,3,2,4)][1]), ybottom = unname(ext(ast_crop_32610)[c(1,3,2,4)][2]), xright=unname(ext(ast_crop_32610)[c(1,3,2,4)][3]), ytop=unname(ext(ast_crop_32610)[c(1,3,2,4)][4]))
library(rgl)
x = plot(clip_pc, bg = 'white', size = 3)
add_dtm3d(x, ast_crop_32610)
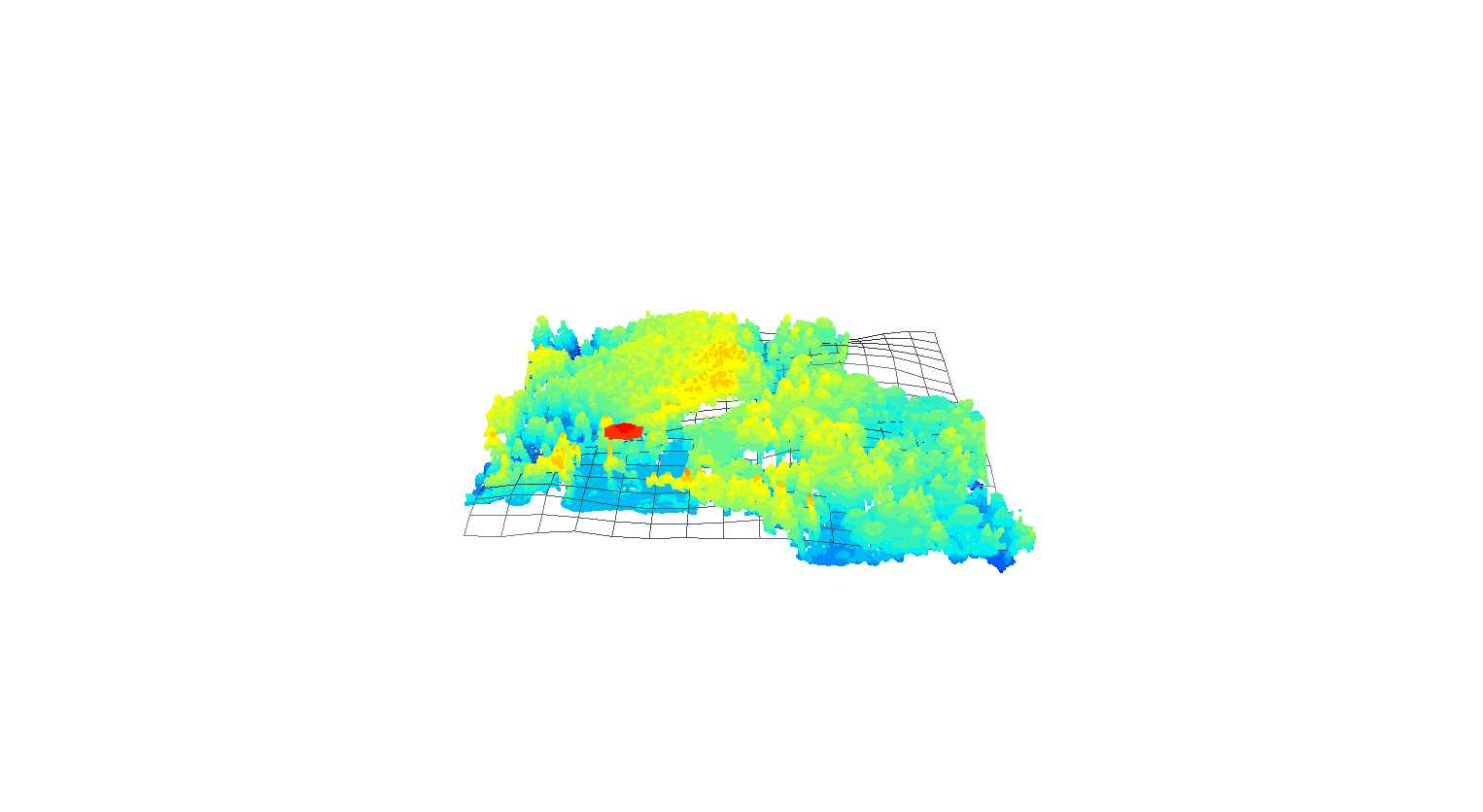
现在,(假设这一切不是不必要的)我们可以继续讨论分类问题.
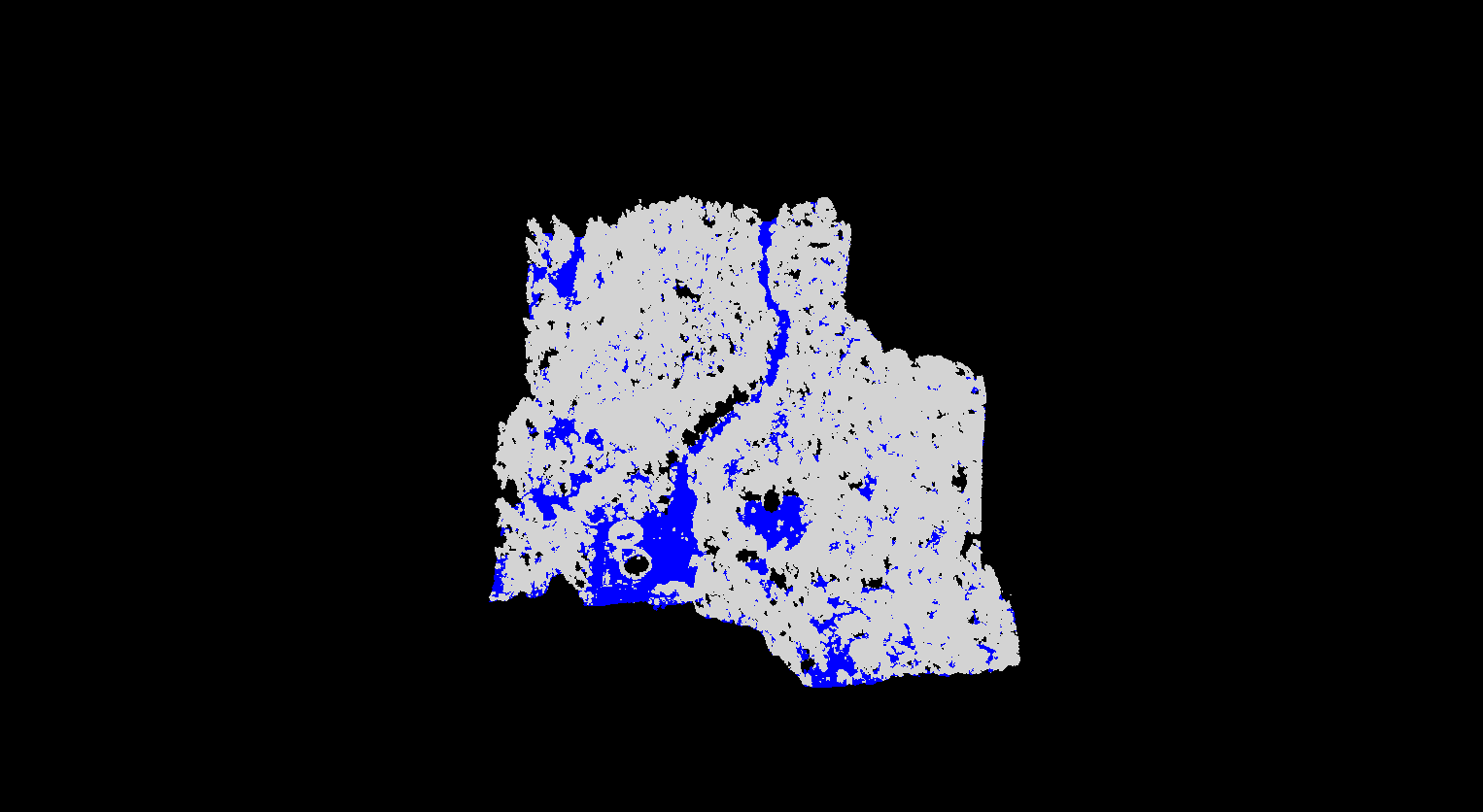
# install.packages('RCSF', dependencies = TRUE) uncomment if needed
mycsf <- csf(TRUE, 1, 1, time_step = 1)
clip_pc <- classify_ground(clip_pc, mycsf)
plot(clip_pc, color = 'Classification')我们似乎要有所进展..。蓝色是地面,灰色/黑色不是地面。现在,如何把塔转到“2”。
#returning to the click approach for 'water tower'
plot(canopy_p2r)
pts_tower <- click(canopy_p2r, n = 6, xy = TRUE)
pts_tower[7, ] <- pts_tower[1, ]
tower_roi <- st_polygon(list(as.matrix(pts_tower[, 1:2])))
# classify tower
clip_pc <- classify_poi(clip_pc, LASBUILDING, roi = st_sfc(tower_roi, crs = 32610), inverse = FALSE)
poi <- ~Classification !=LASGROUND
clip_pc <- classify_poi(clip_pc, LASHIGHVEGETATION, poi = poi, roi = st_sfc(tower_roi, crs = 32610), inverse = TRUE)在这一点上,事情是‘批量’分类,但仍然存在‘回报’的问题。但是我想我们要做的第一件事是normalization,同时我们进一步研究是否可以在事后评估returns。留到这里
writeLAS(clip_pc, file = 'semi_processed.las', index = TRUE)期待在first_returns上取得一些进展。更有可能不是。任何返回都需要时间戳。
summary(clip_pc@data)
X Y Z gpstime Intensity
Min. :511010 Min. :5206432 Min. : 62.66 Min. :0 Min. :0
1st Qu.:511113 1st Qu.:5206581 1st Qu.: 84.13 1st Qu.:0 1st Qu.:0
Median :511206 Median :5206675 Median : 94.45 Median :0 Median :0
Mean :511204 Mean :5206684 Mean : 92.93 Mean :0 Mean :0
3rd Qu.:511289 3rd Qu.:5206784 3rd Qu.:100.75 3rd Qu.:0 3rd Qu.:0
Max. :511424 Max. :5206950 Max. :138.43 Max. :0 Max. :0
ReturnNumber NumberOfReturns ScanDirectionFlag EdgeOfFlightline
Min. :0 Min. :0 Min. :0 Min. :0
1st Qu.:0 1st Qu.:0 1st Qu.:0 1st Qu.:0
Median :0 Median :0 Median :0 Median :0
Mean :0 Mean :0 Mean :0 Mean :0
3rd Qu.:0 3rd Qu.:0 3rd Qu.:0 3rd Qu.:0
Max. :0 Max. :0 Max. :0 Max. :0
Classification Synthetic_flag Keypoint_flag Withheld_flag ScanAngleRank
Min. :2.00 Mode :logical Mode :logical Mode :logical Min. :0
1st Qu.:5.00 FALSE:2232003 FALSE:2232003 FALSE:2232003 1st Qu.:0
Median :5.00 Median :0
Mean :4.34 Mean :0
3rd Qu.:5.00 3rd Qu.:0
Max. :6.00 Max. :0
UserData PointSourceID R G B
Min. :0 Min. :0 Min. : 0 Min. : 3328 Min. : 256
1st Qu.:0 1st Qu.:0 1st Qu.:16384 1st Qu.:24832 1st Qu.:17408
Median :0 Median :0 Median :28672 Median :36096 Median :24832
Mean :0 Mean :0 Mean :28732 Mean :35534 Mean :25653
3rd Qu.:0 3rd Qu.:0 3rd Qu.:40192 3rd Qu.:46336 3rd Qu.:32512
Max. :0 Max. :0 Max. :65280 Max. :65280 Max. :65280
length(which(clip_pc@data$Classification == 0))
[1] 0好吧,一切都是保密的,如果不恰当的话。如果没有时间戳,就像上面所缺少的那样,很难“填充”/创建返回等等。但不是一场彻底的失败。给定这些当前对象,仍然可以执行normalization:这是用户的练习。最好问问,是谁发的这些数据,你从哪里得到的?
https://stackoverflow.com/questions/74156129
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号