
是否可以为GEKKO地平线不同区域的简历指定不同的SPHI或SPLO限制?
我想为系统的动态调度优化建立一个GEKKO模型。我正在探索一个玩具问题的GEKKO功能(下面的代码)。我预见到,它将被要求为某些CV为地平线的不同部分指定不同的目标,如下所示。
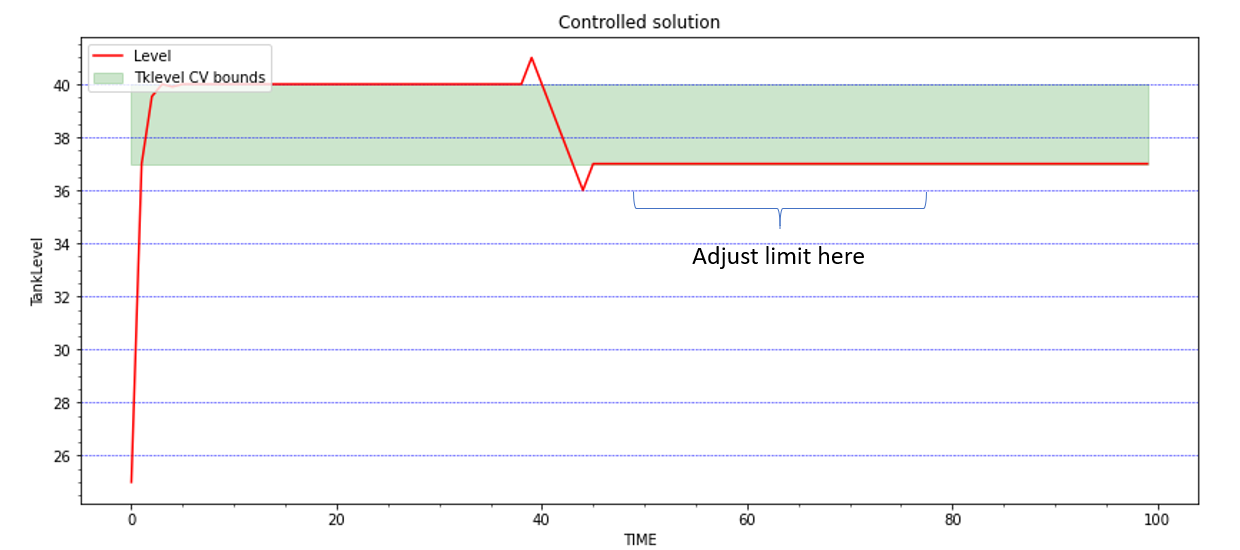
我尝试为级别SPLO的CV参数分配一个数组,但它只是将SPHI和SPLO折叠为CV的起始值。
我喜欢使用目标函数来驱动解决方案的灵活性,而不是“硬”约束。这能在一个非迭代的实现中实现吗?如果是的话,如何实现?
from gekko import GEKKO
import numpy as np
import json
import pandas as pd
from matplotlib import pyplot as plt
def G1_offline(timespace=100):
tk_lowlimit=[37]*100 #init low limit
tk_lowlimit[40:70]=[38]*30 #increase low limit for portion of horizon
m=GEKKO(remote=False)
#tk_lowlimit_hard=m.Param(tk_lowlimit)
rundown_schedule=[100]*timespace #init rundown schedule
rundown_schedule[40:45]=[95]*5 #adjust schedile for few points
m.time=np.linspace(0,timespace-1,timespace)
m.Unit1_Feed=m.MV(value=25,lb=0,ub=60,name='Unit1 Feed')
m.Unit2_Feed=m.MV(value=27,lb=0,ub=60,name='Unit2 Feed')
m.Fuel=m.MV(value=10,lb=0,ub=100,name='Fuel')
m.Rundown=m.MV(name='Rundown') #This is a DV
m.Efficiency=m.FV(value=0.99,lb=0.95,ub=1,name='Efficiency')
m.Rundown.value=rundown_schedule
m.Flare=m.SV(value=30,lb=0,ub=100,name='Flare')
m.TankLevel=m.CV(value=25, lb=0,ub=300,name='tklevel')
m.Consumers=m.MV(value=30,lb=0,ub=130,name='Consumers')
m.Product=m.Intermediate((m.Unit1_Feed+m.Unit2_Feed)*m.Efficiency,name='Product')
m.Balance=m.Intermediate(m.Product-m.Consumers,name='Balance')
m.Equation(m.TankLevel.dt()==m.Balance)
m.Equation(m.Flare==m.Rundown-(m.Unit1_Feed+m.Unit2_Feed+m.Fuel))
#m.Equation(m.Flare>=1)
#GLOBAL OPTIONS
m.options.IMODE=6 #control mode,dynamic control, simultaneous
m.options.NODES=2 #collocation nodes
m.options.SOLVER=1 # 1=APOPT, 2=BPOPT, 3=IPOPT
m.options.CV_TYPE=1 #2 = squared error from reference trajectory
m.options.CTRL_UNITS=3 #control time steps units (3= HOURS)
m.options.CTRL_TIME=1 #1=1 hour per time step
m.options.REQCTRLMODE=3 #3= CONTROL
#m.options.SCALING=2
m.options.RTOL=1e-6
m.options.OTOL=1e-6
#m.options.CV_WGT_START=5
m.options.CSV_WRITE=2
#MV/DV modes
m.Unit1_Feed.STATUS=1 #1 = can change
m.Unit2_Feed.STATUS=1 #1 = can change
m.Fuel.STATUS=1 #1 = can change
m.Consumers.STATUS=1 #1 = can change
m.Rundown.STATUS=0 #0 = cannot change, this is a DV
m.Efficiency.STATUS=0
m.Efficiency.FSTATUS=1
#CV Modes
m.TankLevel.STATUS=1 #1 = Control this CV
#m.Flare.STATUS=0 #0 = Do Not Control this CV
m.TankLevel.FSTATUS=1 #Allow Feedback
m.TankLevel.STATUS=1 #Control this CV
m.TankLevel.TAU=12 #Time constant for trajectory
m.TankLevel.SPHI=40 #Upper limit for trajectory
m.TankLevel.SPLO=37 #Lower limit for trajectory
m.TankLevel.WSPLO=20 #Penalty for crossing LO limit
m.TankLevel.WSPHI=20 #Penalty for crossing HI limit
m.TankLevel.TR_INIT=0 #0 -Do not re-center.
m.TankLevel.TR_OPEN=1 #Openi#ng shape of trajectory
m.Consumers.COST=-40
m.Unit1_Feed.COST=5
m.Unit2_Feed.COST=4
m.Fuel.COST=-2
#m.Flare.COST=0
m.Consumers.DCOST=15
m.Unit1_Feed.DCOST=5
m.Unit2_Feed.DCOST=5
m.Fuel.DCOST=1
m.Consumers.DMAX=10
m.Unit1_Feed.DMAX=10
m.Unit2_Feed.DMAX=8
m.Fuel.DMAX=10
m.Consumers.MV_STEP_HOR=1
m.Unit1_Feed.MV_STEP_HOR=1
m.Unit2_Feed.MV_STEP_HOR=1
m.Fuel.MV_STEP_HOR=1
m.solve(GUI=False)
with open(m.path+'//results.json') as f:
results = json.load(f)
#print(results)
results_df=pd.DataFrame(results)
print(results_df)
#results_df.to_excel(r'c:\data\toyproblem.xlsx')
fig = plt.figure(figsize=(14,6))
plt.plot(results_df['time'],results_df['tklevel'],color='red',label='Level')
plt.fill_between(x=results_df['time'],y1=results_df['tklevel.tr_lo'], y2=results_df['tklevel.tr_hi'],color='green',alpha=0.2, label='Tklevel CV bounds')
plt.xlabel('TIME')
plt.title('Controlled solution')
plt.ylabel('TankLevel')
plt.legend(bbox_to_anchor=(0.0, 1), loc='upper left', borderaxespad=0.5)
plt.minorticks_on()
plt.grid(color = 'b', linestyle = '--', linewidth = 0.5, axis='y')
plt.show()
fig = plt.figure(figsize=(14,6))
plt.plot(results_df['time'],results_df['unit1_feed'],color='red',label='Unit1')
plt.plot(results_df['time'],results_df['unit2_feed'],color='green',label='Unit2')
plt.plot(results_df['time'],results_df['consumers'],color='black',label='Consumers')
plt.plot(results_df['time'],results_df['flare'],color='orange',label='Flare')
plt.plot(results_df['time'],results_df['fuel'],color='blue',label='Fuel')
plt.plot(results_df['time'],results_df['rundown'],color='purple',label='Rundown')
plt.xlabel('TIME'), plt.ylabel('knm3/h'), plt.title('Independent variables'),
plt.legend(bbox_to_anchor=(0.0, 1), loc='upper left', borderaxespad=0.5)
plt.minorticks_on()
plt.grid(color = 'b', linestyle = '--', linewidth = 0.5, axis='y')
trj_hi=results_df['tklevel.tr_hi']
trj_lo=results_df['tklevel.tr_lo']
return m,results_df
#----main----
c1,results_df=G1_offline(100)回答 1
Stack Overflow用户
发布于 2022-10-07 12:37:04
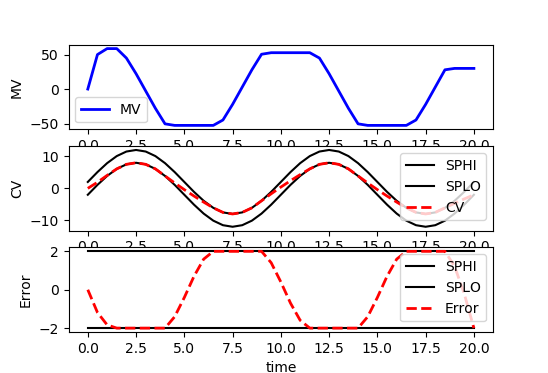
可以定制SPHI和SPLO,而不是固定的目标值。这是通过将CV重新定义为当前值和目标值之间的差异来实现的。目标值可以是前馈traj=m.Param(),并且控制器的每个周期的值都更新为类似于traj.value = [custom_setpoint]的值。在动态优化过程中有一个这种方法的例子(参见页面底部)。
# Error
e = m.CV(value=0,name='e')
m.Equation(e==v-traj)
# CV tuning
e.STATUS = 1 #add the CV to the objective
m.options.CV_TYPE = 1 #Dead-band
db = 2
e.SPHI = db #set point
e.SPLO = -db #set point
e.TR_INIT = 0 #dead-band有些应用程序需要一个不符合标准格式的自定义参考轨迹。自定义参考轨迹是通过创建一个新的误差(e)变量来指定的,即指定轨迹(正弦、锯齿、随机等)与模型输出之间的差异。此误差被指定为受控变量(CV),其上、下死区表示为SPHI和SPLO。CV值也可以是带平方误差目标(e.SP=0,m.options.CV_TYPE=2)的零值,以驱动目标,而不是死区范围。
import numpy as np
from random import random
from gekko import GEKKO
import matplotlib.pyplot as plt
# initialize GEKKO model
m = GEKKO()
# time
m.time = np.linspace(0,20,41)
# constants
mass = 500
# Parameters
b = m.Param(value=50)
K = m.Param(value=0.8)
# Manipulated variable
p = m.MV(value=0, lb=-100, ub=100)
# Reference trajectory
sine = 10*np.sin(m.time/20*4*np.pi)
traj = m.Param(value=sine)
# Controlled Variable
v = m.SV(value=0,name='v')
# Error
e = m.CV(value=0,name='e')
# Equations
m.Equation(mass*v.dt() == -v*b + K*b*p)
m.Equation(e==v-traj)
m.options.IMODE = 6 # control
# MV tuning
p.STATUS = 1 #allow optimizer to change
p.DCOST = 0.1 #smooth out MV
p.DMAX = 50 #slow down change of MV
# CV tuning
e.STATUS = 1 #add the CV to the objective
m.options.CV_TYPE = 1 #Dead-band
db = 2
e.SPHI = db #set point
e.SPLO = -db #set point
e.TR_INIT = 0 #dead-band
# Solve
m.solve()
# get additional solution information
import json
with open(m.path+'//results.json') as f:
results = json.load(f)
# Plot solution
plt.figure()
plt.subplot(3,1,1)
plt.plot(m.time,p.value,'b-',lw=2,label='MV')
plt.legend(loc='best')
plt.ylabel('MV')
plt.subplot(3,1,2)
plt.plot(m.time,sine+db,'k-',label='SPHI')
plt.plot(m.time,sine-db,'k-',label='SPLO')
plt.plot(m.time,v.value,'r--',lw=2,label='CV')
plt.legend(loc='best')
plt.ylabel('CV')
plt.subplot(3,1,3)
plt.plot(m.time,results['e.tr_hi'],'k-',label='SPHI')
plt.plot(m.time,results['e.tr_lo'],'k-',label='SPLO')
plt.plot(m.time,e.value,'r--',lw=2,label='Error')
plt.legend(loc='best')
plt.ylabel('Error')
plt.xlabel('time')
plt.show()https://stackoverflow.com/questions/73984382
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号