
用经济成本函数求最优控制收敛
我一直在使用gekko来优化一个生物反应器,以示例12 (https://apmonitor.com/wiki/index.php/Main/GekkoPythonOptimization)为基础。
我的模型稍微复杂一些,包括6个状态、7个状态和2个操纵变量。当我运行它的时间小值(t ~20),模拟是能够收敛(虽然需要一个良好的时间分辨率(dt < 0.1)。但是,当我试图延长时间(例如,t= 30)时,它的失败与以下错误相当一致:
EXIT: Converged to a point of local infeasibility. Problem may be infeasible我尝试了以下几点:
- 使用不同的m.options.SOLVER = 1,2,3的求解器
- 将m.options.MAX_ITER提高到10000
- 将m.options.NODES降至1(低阶解似有助于收敛)
- 通过在声明
D = m.MV(value=0.1,lb=0.0,ub=0.1)中指定一个值,向MVs提供一个合理的初始猜测。从一些不同的帖子来看,这似乎是有帮助的。
我不太清楚该如何解决这个问题。对于一个简化的模型(3个状态、5个参数和2个MVs),即使简化模型的速率常数是整个模型的子集,gekko仍然能够很好地优化它(虽然当我尝试大t时它失败了)。
我的代码如下:
from gekko import GEKKO
import numpy as np
import matplotlib.pyplot as plt
#Parameters and IC
full_params = [0.027,2.12e-9,7.13e-3,168,168,0.035,1e-3]
full_x0 = [5e6,0.0,0.0,0.0,1.25e5,0.0]
mu,k1,k2,k3,k33,k4, f= full_params
#Initialize model
m = GEKKO()
#Time discretization
n_steps = 201
m.time = np.linspace(0,20,n_steps)
#Define MVs
D = m.MV(value=0.1,lb=0.0,ub=0.1)
D.STATUS = 1
D.DCOST = 0.0
Tin = m.MV(value=1e7,lb=0.0,ub=1e7)
Tin.STATUS = 1
Tin.DCOST = 0.0
#Define States
T = m.Var(value=full_x0[0])
Id = m.Var(value=full_x0[1])
Is = m.Var(value=full_x0[2])
Ic = m.Var(value=full_x0[3])
Vs = m.Var(value=full_x0[4])
Vd = m.Var(value=full_x0[5])
#Define equations
m.Equation(T.dt() == mu*T -k1*(Vs+Vd)*T + D*(Tin-T))
m.Equation(Id.dt() == k1*Vd*T -(k1*Vs -mu)*Id -D*Id)
m.Equation(Is.dt() == k1*Vs*T -(k1*Vd + k2)*Is -D*Is)
m.Equation(Ic.dt() == k1*(Vs*Id + Vd*Is) -k2*Ic -D*Ic)
m.Equation(Vs.dt() == k3*Is - (k1*(T+Id+Is+Ic) + k4 + D)*Vs)
m.Equation(Vd.dt() == k33*Ic + f*k3*Is - (k1*(T+Id+Is+Ic) + k4 + D)*Vd)
#Define objective function
J = m.Var(value=0) # objective (profit)
Jf = m.FV() # final objective
Jf.STATUS = 1
m.Connection(Jf,J,pos2="end")
m.Equation(J.dt() == D*(Vs + Vd))
m.Obj(-Jf)
m.options.IMODE = 6 # optimal control
m.options.NODES = 1 # collocation nodes
m.options.SOLVER = 3
m.options.MAX_ITER = 10000
#Solve
m.solve()为了清楚起见,模型方程如下:
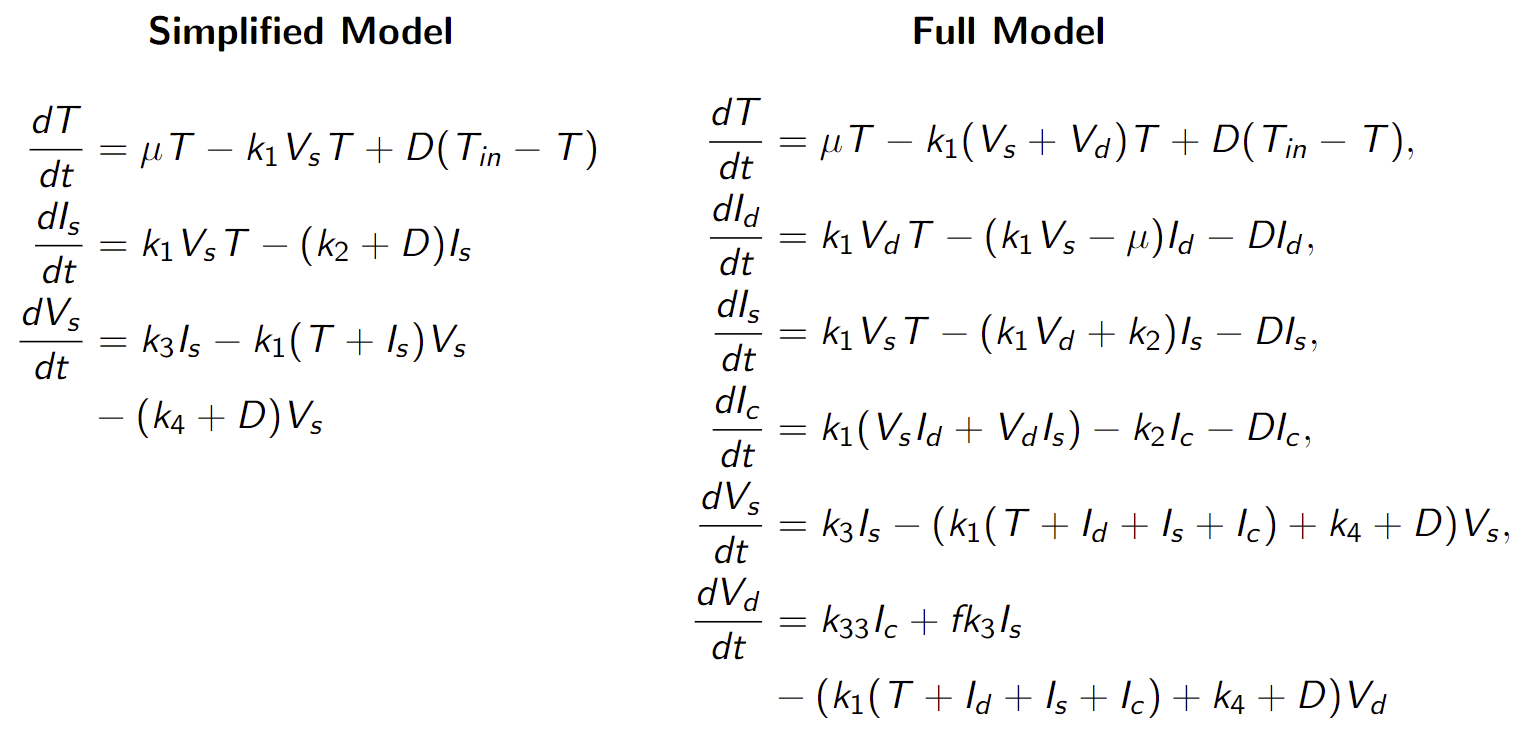
如果能提供任何帮助,我将不胜感激,例如,如何实现每个https://apmonitor.com/do/index.php/Main/ModelInitialization参数的缩放。谢谢!
回答 1
Stack Overflow用户
发布于 2022-10-06 23:13:46
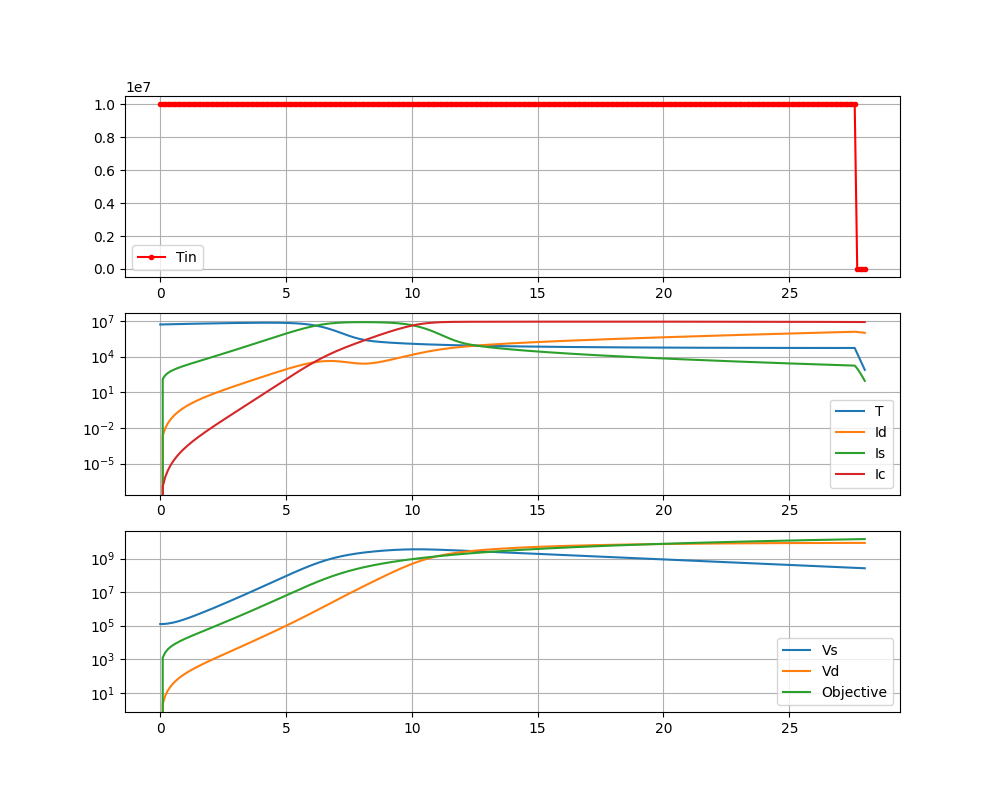
尝试增加最后一次的值,直到求解者无法再找到解决方案,比如使用tf=28 (成功)。解的图显示,在解几乎无法收敛的时候,Tin被调整为零。我添加了几个额外的目标形式,它们无助于收敛(请参阅客观方法#1和#2)。J、Vs、Vd的值很高,但求解器并不是无法管理的。考虑缩放的一种方法是将单元(如从kg/day转换为kg/s )作为基础。Gekko通过初始条件自动缩放变量。
from gekko import GEKKO
import numpy as np
import matplotlib.pyplot as plt
#Parameters and IC
full_params = [0.027,2.12e-9,7.13e-3,168,168,0.035,1e-3]
full_x0 = [5e6,0.0,0.0,0.0,1.25e5,0.0]
mu,k1,k2,k3,k33,k4, f= full_params
#Initialize model
m = GEKKO()
#Time discretization
tf = 28
n_steps = tf*10+1
m.time = np.linspace(0,tf,n_steps)
#Define MVs
D = m.MV(value=0.1,lb=0.0,ub=0.1)
D.STATUS = 1
D.DCOST = 0.0
Tin = m.MV(value=1e7,lb=0,ub=1e7)
Tin.STATUS = 1
Tin.DCOST = 0.0
#Define States
T = m.Var(value=full_x0[0])
Id = m.Var(value=full_x0[1])
Is = m.Var(value=full_x0[2])
Ic = m.Var(value=full_x0[3])
Vs = m.Var(value=full_x0[4])
Vd = m.Var(value=full_x0[5])
#Define equations
m.Equation(T.dt() == mu*T -k1*(Vs+Vd)*T + D*(Tin-T))
m.Equation(Id.dt() == k1*Vd*T -(k1*Vs -mu)*Id -D*Id)
m.Equation(Is.dt() == k1*Vs*T -(k1*Vd + k2)*Is -D*Is)
m.Equation(Ic.dt() == k1*(Vs*Id + Vd*Is) -k2*Ic -D*Ic)
m.Equation(Vs.dt() == k3*Is - (k1*(T+Id+Is+Ic) + k4 + D)*Vs)
m.Equation(Vd.dt() == k33*Ic + f*k3*Is - (k1*(T+Id+Is+Ic) + k4 + D)*Vd)
# Original Objective
if True:
J = m.Var(value=0) # objective (profit)
Jf = m.FV() # final objective
Jf.STATUS = 1
m.Connection(Jf,J,pos2="end")
m.Equation(J.dt() == D*(Vs + Vd))
m.Obj(-Jf)
# Objective Method 1
if False:
p=np.zeros_like(m.time); p[-1]=1
final = m.Param(p)
J = m.Var(value=0) # objective (profit)
m.Equation(J.dt() == D*(Vs + Vd))
m.Maximize(J*final)
# Objective Method 2
if False:
m.Maximize(D*(Vs + Vd))
m.options.IMODE = 6 # optimal control
m.options.NODES = 2 # collocation nodes
m.options.SOLVER = 3
m.options.MAX_ITER = 10000
#Solve
m.solve()
plt.figure(figsize=(10,8))
plt.subplot(3,1,1)
plt.plot(m.time,Tin.value,'r.-',label='Tin')
plt.legend(); plt.grid()
plt.subplot(3,1,2)
plt.semilogy(m.time,T.value,label='T')
plt.semilogy(m.time,Id.value,label='Id')
plt.semilogy(m.time,Is.value,label='Is')
plt.semilogy(m.time,Ic.value,label='Ic')
plt.legend(); plt.grid()
plt.subplot(3,1,3)
plt.semilogy(m.time,Vs.value,label='Vs')
plt.semilogy(m.time,Vd.value,label='Vd')
plt.semilogy(m.time,J.value,label='Objective')
plt.legend(); plt.grid()
plt.show()问题中是否存在某种类型的约束,最终有利于减少?这可能是tf=30不可行的原因。获得可行解的另一种方法是用m.options.TIME_STEP=20求解,并在时间步骤20的先验解等于值的前提下解决问题。
#Solve
m.solve()
m.options.TIME_SHIFT=20
m.solve()这样,解决方案就会及时前进,在各个部分进行优化。这种策略被用来优化一个高空长耐力(HALE)无人机,并被称为后退地平线控制。
马丁,R.A.,盖茨,N.,宁,A.,赫登仁,J.D.,“在站台约束下高空太阳能飞机飞行轨迹的动态优化”,“制导、控制和动力学杂志”,2018年,doi: 10.2514/1.G003737。
https://stackoverflow.com/questions/73957616
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号