
GEKKO多相优化:无解,-1自由度
我现在正在学习GEKKO,并尝试编写一个简单的一维控制示例,其中有一个具有动态特性的块。
dx/dt =v
dv/dt =u
电话:-5 <= u <= 5
其中x是位置,v是速度,u是施加的驱动,在初始和最终速度为0的情况下,从位置0移动到1倍的时间单位。目标是:
分钟abs(u)
它工作在一个单一的阶段,结果是这 Bang Bang控件.
{kind=link}

现在,我想尝试将其作为一个多阶段的轨道来实现,其中包括三个相互关联的阶段:
- U=5
- U=0
- U= -5
每个阶段的时间是控制变量。
问题是求解者找不到解决办法。自由度为-1,理论上为-1(总最后一次)与给定目标对应;如果目标被平等约束所取代,则为0(结果导致求解者表示的自由度更少,约为-100)。
这是我的代码:
import numpy as np
import matplotlib.pyplot as plt
from gekko import GEKKO
m = GEKKO(remote=True) # Model
n = 3 # Number of phases: Bang-Off-Bang
max_u = 5.0 # Control can either be max_u, 0 or -max_u
# Options
m.options.NODES = 4 # Two intermediate nodes between collocation points
m.options.SOLVER = 1 # APOPT
m.options.IMODE = 6 # MPC Direct Collocation
m.options.MAX_ITER = 500 # To prevent endless loops
m.options.MV_TYPE = 0 # MVs are constant between endpoints
m.options.DIAGLEVEL = 1 # Show some diagnostics
# Time from 0 to 1 in 31 collocation points for every phase each
m.time = np.linspace(0, 1, 31)
tf = [m.FV(value=0.3) for i in range(n)]
for i in range(n):
tf[i].STATUS = 1 # make final time controllable
# Collocation variables x and v
x = [m.Var(value=0, fixed_initial=False) for i in range(n)]
v = [m.Var(value=0, fixed_initial=False) for i in range(n)]
u = [max_u, 0, -max_u] # For the three phases
# Fix start- and endpoint (Inbetween points can be fixed with m.fix())
m.fix_initial(x[0], val=0)
m.fix_initial(v[0], val=0)
m.fix_final(x[n-1], val=1)
m.fix_final(v[n-1], val=0)
# Differential equations describing the system scaled by tf
for i in range(n):
m.Equation(x[i].dt() == v[i]*tf[i])
m.Equation(v[i].dt() == u[i]*tf[i])
# Connect phases at endpoints
for i in range(n-1):
m.Connection(x[i+1], x[i], 1, 'end', 1, 'end')
m.Connection(x[i+1],'calculated', pos1=1, node1=1)
m.Connection(v[i+1], v[i], 1, 'end', 1, 'end')
m.Connection(v[i+1],'calculated', pos1=1, node1=1)
# Make final time equal to 1
m.Minimize((m.sum(tf)-1)**2)
#m.Equation(m.sum(tf) == 1) # Could be used instead of objective
m.open_folder()
# Run optimization with Diagnostics
m.solve(disp=True)我希望有人能帮我,谢谢你提前!
回答 1
Stack Overflow用户
发布于 2022-05-30 04:39:43
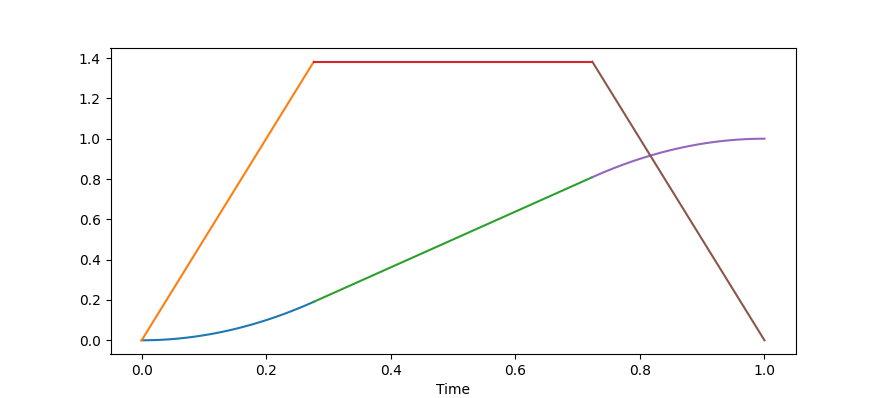
软终端约束通常用于收敛到解决方案。下面是对硬终端约束的替换:
f = np.zeros(31); f[-1]=1; final=m.Param(f)
m.Minimize(final*(x[n-1]-1)**2)
m.Minimize(final*v[n-1]**2)
#m.fix_final(x[n-1], val=1)
#m.fix_final(v[n-1], val=0)这给出了三个连接相的最优解。
import numpy as np
import matplotlib.pyplot as plt
from gekko import GEKKO
m = GEKKO(remote=True) # Model
n = 3 # Number of phases: Bang-Off-Bang
max_u = 5.0 # Control can either be max_u, 0 or -max_u
# Options
m.options.NODES = 4 # Two intermediate nodes between collocation points
m.options.SOLVER = 1 # APOPT
m.options.IMODE = 6 # MPC Direct Collocation
m.options.MAX_ITER = 500 # To prevent endless loops
m.options.MV_TYPE = 0 # MVs are constant between endpoints
m.options.DIAGLEVEL = 0 # Show some diagnostics
# Time from 0 to 1 in 31 collocation points for every phase each
m.time = np.linspace(0, 1, 31)
tf = [m.FV(value=0.3) for i in range(n)]
for i in range(n):
tf[i].STATUS = 1 # make final time controllable
# Collocation variables x and v
x = [m.Var(value=0, fixed_initial=False) for i in range(n)]
v = [m.Var(value=0, fixed_initial=False) for i in range(n)]
u = [max_u, 0, -max_u] # For the three phases
# Fix start- and endpoint (Inbetween points can be fixed with m.fix())
m.fix_initial(x[0], val=0)
m.fix_initial(v[0], val=0)
f = np.zeros(31); f[-1]=1; final=m.Param(f)
m.Minimize(final*(x[n-1]-1)**2)
m.Minimize(final*v[n-1]**2)
#m.fix_final(x[n-1], val=1)
#m.fix_final(v[n-1], val=0)
# Differential equations describing the system scaled by tf
for i in range(n):
m.Equation(x[i].dt() == v[i]*tf[i])
m.Equation(v[i].dt() == u[i]*tf[i])
# Connect phases at endpoints
for i in range(n-1):
m.Connection(x[i+1], x[i], 1, 'end', 1, 'end')
m.Connection(x[i+1],'calculated', pos1=1, node1=1)
m.Connection(v[i+1], v[i], 1, 'end', 1, 'end')
m.Connection(v[i+1],'calculated', pos1=1, node1=1)
# Make final time equal to 1
m.Minimize((m.sum(tf)-1)**2)
#m.Equation(m.sum(tf) == 1) # Could be used instead of objective
#m.open_folder()
# Run optimization with Diagnostics
m.solve(disp=True)
# Generate plot
t = [m.time*tf[i].value[0] for i in range(3)]
t[1] += t[0][-1]
t[2] += t[1][-1]
for i in range(3):
plt.plot(t[i],x[i].value)
plt.plot(t[i],v[i].value)
plt.xlabel('Time')
plt.show() 缺少2自由度(-1自由度)是因为当使用m.fix_final(x[n-1], val=1)和m.fix_final(v[n-1], val=0)时,端点处的导数也是固定的。这是关于Gekko和如何定义变量的一个已知问题。如果您确实需要一个硬约束,还有另一种方法(创建一个连接到端点的固定FV )。
https://stackoverflow.com/questions/72250534
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号