
在python中旋转一组三维坐标
在python中旋转一组三维坐标
提问于 2021-12-31 15:25:20
我有一组分子的三维坐标和一个通过它的质心的矢量。我想旋转分子坐标和矢量使矢量与z轴对齐。
我在下面的链接中使用一个脚本来计算从向量到z轴的旋转矩阵,然后将相同的旋转矩阵应用到其他3d坐标:计算旋转矩阵来对齐三维空间中的两个矢量?。
但这种方法使我的分子“扁平”(旋转前的分子和旋转后的黄色):分子前视镜和分子侧视。
{kind=link}
{kind=link}
有人知道为什么这种方法不起作用吗?在数学上是正确的吗?谢谢!
回答 1
Stack Overflow用户
回答已采纳
发布于 2021-12-31 16:22:21
在这个答案中,您所链接的问题的方法在我看来是正确的,并生成一个旋转矩阵(从无限个旋转矩阵集合中将vec1与vec2对齐):
def rotation_matrix_from_vectors(vec1, vec2):
""" Find the rotation matrix that aligns vec1 to vec2
:param vec1: A 3d "source" vector
:param vec2: A 3d "destination" vector
:return mat: A transform matrix (3x3) which when applied to vec1, aligns it with vec2.
"""
a, b = (vec1 / np.linalg.norm(vec1)).reshape(3), (vec2 / np.linalg.norm(vec2)).reshape(3)
v = np.cross(a, b)
c = np.dot(a, b)
s = np.linalg.norm(v)
kmat = np.array([[0, -v[2], v[1]], [v[2], 0, -v[0]], [-v[1], v[0], 0]])
rotation_matrix = np.eye(3) + kmat + kmat.dot(kmat) * ((1 - c) / (s ** 2))
return rotation_matrix这个旋转矩阵应该是正交的。
--可能是(也就是猜测)--您的数据发生了什么变化:不同的轴有相当大的差异(可能是不同的单位?)在这种情况下,首先应该在旋转之前对数据进行规范化。例如,假设您的原始数据是一个带有x.shape == (n, 3)的数组x.shape == (n, 3),而您的向量是带有形状(3,)的v
u, s = x.mean(0), x.std(0)
x2 = (x - u) / s
v2 = (v - u) / s现在,尝试在x2上应用您的旋转,将v2与[0,0,1]对齐。
下面是一个用于说明的玩具示例:
n = 100
x = np.c_[
np.random.normal(0, 100, n),
np.random.normal(0, 1, n),
np.random.normal(4, 3, n),
]
v = np.array([1,2,3])
x = np.r_[x, v[None, :]] # adding v into x so we can visualize it easily无归一化的
A = rotation_matrix_from_vectors(np.array(v), np.array((0,0,1)))
y = x @ A.T
fig, axes = plt.subplots(nrows=2, ncols=2)
for ax, (a, b) in zip(np.ravel(axes), combinations(range(3), 2)):
ax.plot(y[:, a], y[:, b], '.')
ax.plot(y[-1, a], y[-1, b], 'ro')
ax.set_xlabel(a)
ax.set_ylabel(b)
axes[1][1].set_visible(False)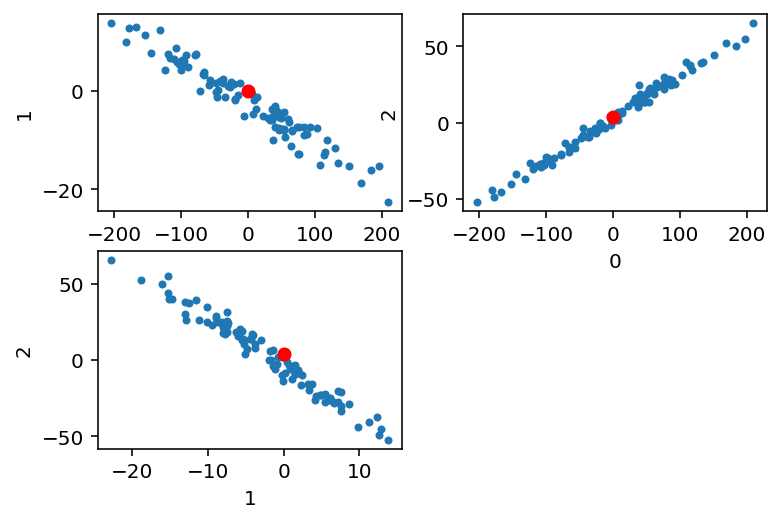
具有先验归一化的
u, s = x.mean(0), x.std(0)
x2 = (x - u) / s
v2 = (v - u) / s
A = rotation_matrix_from_vectors(np.array(v2), np.array((0,0,1)))
y = x2 @ A.T
fig, axes = plt.subplots(nrows=2, ncols=2)
for ax, (a, b) in zip(np.ravel(axes), combinations(range(3), 2)):
ax.plot(y[:, a], y[:, b], '.')
ax.plot(y[-1, a], y[-1, b], 'ro')
ax.set_xlabel(a)
ax.set_ylabel(b)
axes[1][1].set_visible(False)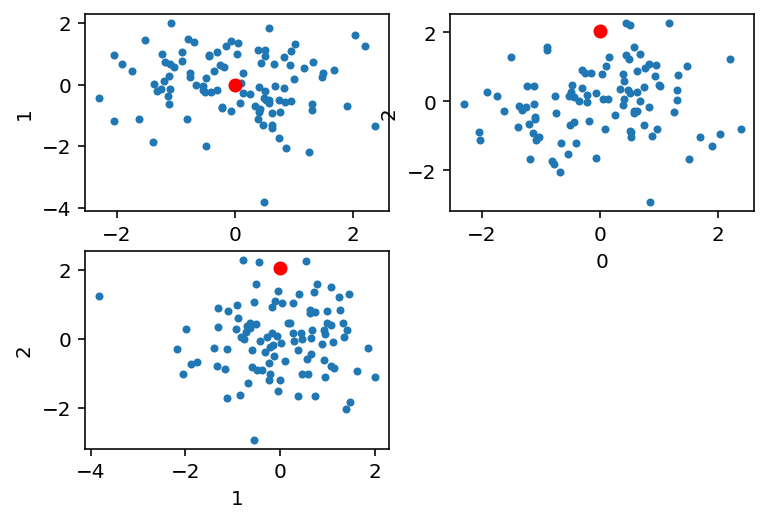
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/70543639
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号