【Matlab 六自由度机器人】运动学正解(附MATLAB机器人正解完整代码)

【Matlab 六自由度机器人】运动学正解(附MATLAB机器人正解完整代码)

用户9613193
发布于 2026-06-16 20:26:52
发布于 2026-06-16 20:26:52
【Matlab 六自由度机器人】求运动学正解
- 往期回顾
- 前言
- 正文
- 一、运动学正解
- 1. 齐次变换矩阵
- 2. 总变换
- 二、代码实现
- 1. 定义各连杆参数
- 2. 齐次变换矩阵及总变换
- 3. 代码运行结果
- 总结
- 参考文献
往期回顾
【汇总】
相关资源:
【主线】
【补充说明】
- 关于灵活工作空间与可达工作空间的理解
- 关于改进型D-H参数(modified Denavit-Hartenberg)的详细建立步骤
- 关于旋转的参数化(欧拉角、姿态角、四元数)的相关问题
- 关于双变量函数atan2(x,y)的解释
- 关于机器人运动学反解的有关问题
前言
本篇介绍机器人运动学正解的有关问题,介绍了如何理解正向运动学,并利用D-H参数求解机器人运动学正解。
以下是本篇文章正文内容,包含对正解的含义的理解和代码的分步解析。
正文
一、运动学正解
定义:已知各关节的运动参数,求末端执行器的相对参考坐标系的位姿。
求解步骤:
- 各连杆首尾相连;
- 确定各连杆间的齐次变换矩阵;
- 得到最后的总变换矩阵。
且该总变换矩阵内的未知数只有各轴的旋转角度,因此得到旋转角度即可得到六自由度机器人的末端笛卡尔空间坐标。
1. 齐次变换矩阵
在上一篇的Matlab建立六自由度机器人模型中详细解释了如何定义机器人的DH参数、如何设置
轴等等,在此只叙述部分内容。 对DH参数的符号约定
DH约定参数 | 符号约定 |
|---|---|
θ θ θ | joint angle 关节转角 |
d d d | link offset 连杆偏移 |
a a a | link length 连杆长度 |
α ( a l p h a ) α(alpha) α(alpha) | link twist 连杆扭角 |
制定DH参数的程序规则 |
joint angle 关节转角
link offset 连杆偏移
link length 连杆长度
link twist 连杆扭角制定DH参数的程序规则
- 参数
是轴
和轴
之间沿轴线
测得的距离;
- 角度
是在垂直于
平面内测得的轴线
和
之间的夹角。角度
的正向取值定义为从
到
,由右手规则来确定;
- 参数
为从原点
到轴线
与
交点之间的距离,该距离沿
轴线进行测量得到;
是在垂直于
的平面内测得的从
到
的角度。
理解了上述的符号约定及程序规则后,在此基础上,每个齐次变换矩阵
都可以表示为是个基本矩阵的乘积,
对于标准型D-H参数其乘积顺序如下:
通用齐次变换矩阵如下:
对于改进型D-H参数其乘积顺序如下:
通用齐次变换矩阵如下:
2. 总变换
确定好DH参数建立方式并构建出各关节的DH参数后,代入各自的通用齐次变换矩阵,得到
、
、
、
、
、
共六个矩阵。在此作者选择的是改进型的D-H参数,因此各矩阵分别如下所示:
对该六个齐次变换矩阵按顺序相乘后得到六自由度机器人的总变换:
二、代码实现
1. 定义各连杆参数
对连杆参数进行符号变量的定义有两种方式,代码如下:
第一种方式 是将所有参数定义为未知量
syms theta1 d1 a1 alpha1;
syms theta2 d2 a2 alpha2;
syms theta3 d3 a3 alpha3;
syms theta4 d4 a4 alpha4;
syms theta5 d5 a5 alpha5;
syms theta6 d6 a6 alpha6;但由于设置太多的未知量会导致总变换的结果过于冗长,因此在此设置 第二种方式 来规避复杂的结果,以下参数请参考上一篇的Matlab建立六自由度机器人模型
%连杆偏移
d1 = 398;
d2 = -0.299;
d3 = 0;
d4 = 556.925;
d5 = 0;
d6 = 165;
%连杆长度
a1 = 0;
a2 = 168.3;
a3 = 650.979;
a4 = 156.240;
a5 = 0;
a6 = 0;
%连杆扭角
alpha1 = 0;
alpha2 = pi/2;
alpha3 = 0;
alpha4 = pi/2;
alpha5 = -pi/2;
alpha6 = pi/2;
%由于我们需要分析各轴θi所对应的机器人末端位置
%因此theta1 theta2 theta3 theta4 theta5 theta6仍设为未知量
syms theta1 theta2 theta3 theta4 theta5 theta6有了以上参数的设置,接下来对参数进行齐次变换矩阵的设置。
2. 齐次变换矩阵及总变换
首先对各参数归纳到一个统一的矩阵中,方便后续对参数的引用
% 参数矩阵取名为MDH
MDH = [theta1 d1 a1 alpha1;
theta2+pi/2 d2 a2 alpha2;
theta3 d3 a3 alpha3;
theta4 d4 a4 alpha4;
theta5 d5 a5 alpha5;
theta6 d6 a6 alpha6];注意!!! 由于作者的六自由度机器人在第二个关节中有一个关节变量偏移量,该偏移量是导致MDH中的theta2需要加pi/2的的关键。
接下来在齐次变换矩阵中引用参数矩阵的数值,对各关节的齐次变换矩阵进行一个定义,代码如下:
T01=[cos(MDH(1,1)) -sin(MDH(1,1)) 0 MDH(1,3);
sin(MDH(1,1))*cos(MDH(1,4)) cos(MDH(1,1))*cos(MDH(1,4)) -sin(MDH(1,4)) -sin(MDH(1,4))*MDH(1,2);
sin(MDH(1,1))*sin(MDH(1,4)) cos(MDH(1,1))*sin(MDH(1,4)) cos(MDH(1,4)) cos(MDH(1,4))*MDH(1,2);
0 0 0 1];
T12=[cos(MDH(2,1)) -sin(MDH(2,1)) 0 MDH(2,3);
sin(MDH(2,1))*cos(MDH(2,4)) cos(MDH(2,1))*cos(MDH(2,4)) -sin(MDH(2,4)) -sin(MDH(2,4))*MDH(2,2);
sin(MDH(2,1))*sin(MDH(2,4)) cos(MDH(2,1))*sin(MDH(2,4)) cos(MDH(2,4)) cos(MDH(2,4))*MDH(2,2);
0 0 0 1];
T23=[cos(MDH(3,1)) -sin(MDH(3,1)) 0 MDH(3,3);
sin(MDH(3,1))*cos(MDH(3,4)) cos(MDH(3,1))*cos(MDH(3,4)) -sin(MDH(3,4)) -sin(MDH(3,4))*MDH(3,2);
sin(MDH(3,1))*sin(MDH(3,4)) cos(MDH(3,1))*sin(MDH(3,4)) cos(MDH(3,4)) cos(MDH(3,4))*MDH(3,2);
0 0 0 1];
T34=[cos(MDH(4,1)) -sin(MDH(4,1)) 0 MDH(4,3);
sin(MDH(4,1))*cos(MDH(4,4)) cos(MDH(4,1))*cos(MDH(4,4)) -sin(MDH(4,4)) -sin(MDH(4,4))*MDH(4,2);
sin(MDH(4,1))*sin(MDH(4,4)) cos(MDH(4,1))*sin(MDH(4,4)) cos(MDH(4,4)) cos(MDH(4,4))*MDH(4,2);
0 0 0 1];
T45=[cos(MDH(5,1)) -sin(MDH(5,1)) 0 MDH(5,3);
sin(MDH(5,1))*cos(MDH(5,4)) cos(MDH(5,1))*cos(MDH(5,4)) -sin(MDH(5,4)) -sin(MDH(5,4))*MDH(5,2);
sin(MDH(5,1))*sin(MDH(5,4)) cos(MDH(5,1))*sin(MDH(5,4)) cos(MDH(5,4)) cos(MDH(5,4))*MDH(5,2);
0 0 0 1];
T56=[cos(MDH(6,1)) -sin(MDH(6,1)) 0 MDH(6,3);
sin(MDH(6,1))*cos(MDH(6,4)) cos(MDH(6,1))*cos(MDH(6,4)) -sin(MDH(6,4)) -sin(MDH(6,4))*MDH(6,2);
sin(MDH(6,1))*sin(MDH(6,4)) cos(MDH(6,1))*sin(MDH(6,4)) cos(MDH(6,4)) cos(MDH(6,4))*MDH(6,2);
0 0 0 1];通过上述,可知总变换代码如下:
T06 = T01*T12*T23*T34*T45*T56;3. 代码运行结果
在代码实例中,我们将对
进行如下赋值
theta1 = pi/3;
theta2 = pi/4;
theta3 = pi/5;
theta4 = pi/3;
theta5 = pi/4;
theta6 = pi/5;运行程序后如下图所示

T06的结果
通过上篇文章的robot.teach() 进行仿真后,其结果如下图所示
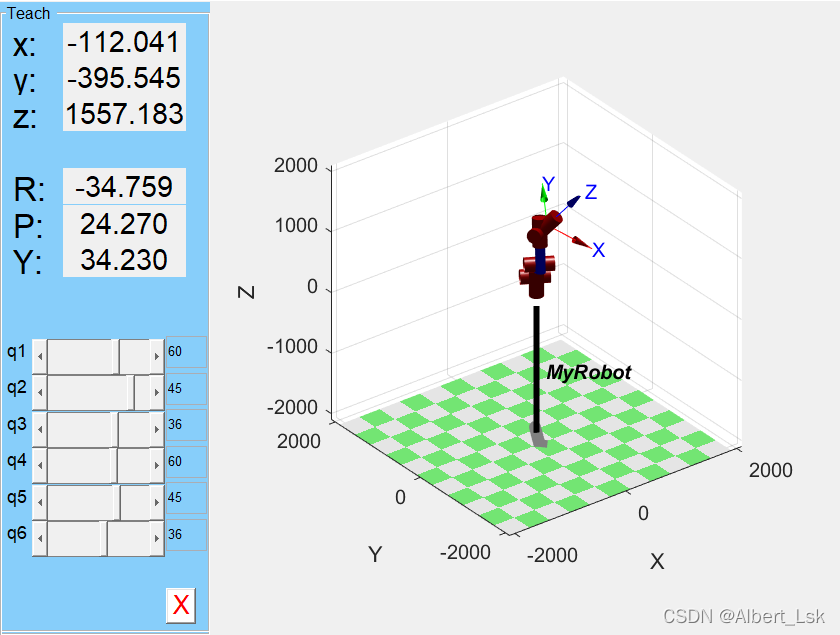
仿真结果
总结
以上就是正向运动学的内容,本文详细介绍了如何理解正向运动学及代码的实现,机器人工具箱提供了如何处理连杆长度、连杆扭曲等函数和方法。
参考文献
本文参与 腾讯云自媒体同步曝光计划,分享自作者个人站点/博客。
原始发表:2022-05-19,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号