Aligning Agents via Planning: A Benchmark for Trajectory-Level Reward
原创
Aligning Agents via Planning: A Benchmark for Trajectory-Level Reward
原创
大模型实验室Lab4AI
发布于 2026-04-21 11:28:03
发布于 2026-04-21 11:28:03
作者信息
南京大学新型软件技术国家重点实验室、南京大学智能科学技术学院、阿里巴巴高德地图
研究背景
- 大语言模型正从被动对话系统演进为可自主调用工具、完成复杂推理的智能体系统,模型行为从单轮回复转变为包含用户输入、推理、工具执行与环境反馈的轨迹序列。
- 传统基于人类反馈的强化学习(RLHF)中,奖励模型(RM)是模型对齐的核心信号源,但现有奖励模型评估基准存在明显缺陷:
- 主流基准仅聚焦短上下文场景下的单轮回复偏好评估,缺乏对复杂推理过程与多轮交互的覆盖;
- 长上下文奖励模型研究多依赖人工扩展上下文,无法刻画智能体工作流的自然复杂度与动态依赖关系;
- 专用工具使用基准仅验证单轮原子动作正确性,忽略连贯的长时序规划行为评估;
- 现有方案无法在工具集成环境中,对奖励模型区分优质与劣质智能体轨迹的能力进行严谨测评。
- 智能体奖励建模需同时评估最终结果与中间步骤的合理性、一致性与安全性,现有评估体系无法满足该需求。
研究目的
- 填补工具集成环境下轨迹级奖励模型专用评估基准的空白,解决现有基准无法测评长时序、多步骤智能体轨迹奖励建模能力的问题。
- 构建覆盖复杂工具使用场景的轨迹级偏好基准,精准测评奖励模型在智能体规划逻辑、工具使用保真度、安全拒绝、错误恢复等维度的判别能力。
- 提供可复用的智能体偏好数据构建方案,为判别式奖励模型(DRM)、生成式奖励模型(GRM)与智能体强化学习提供高质量训练信号。
- 诊断现有奖励模型在轨迹级评估中的失效模式,为下一代规划中心型智能体的对齐研究提供方向。
本文核心贡献
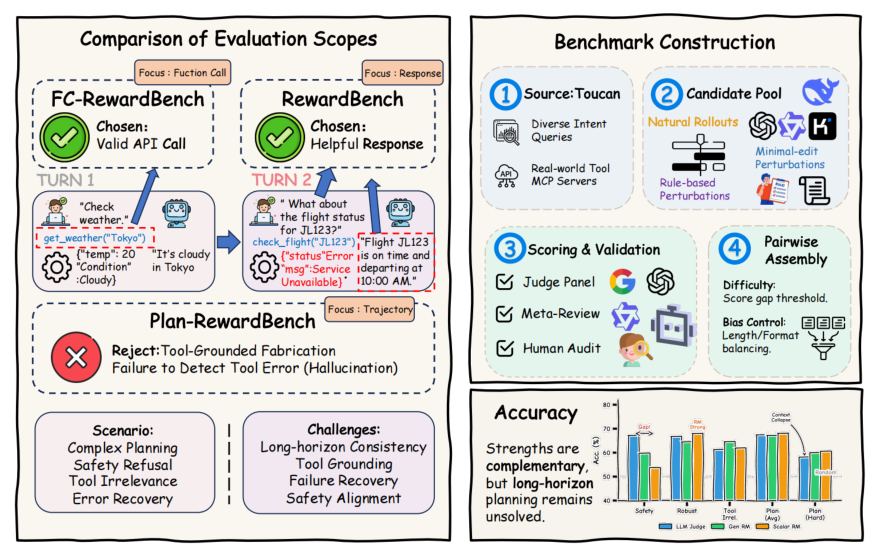
image
- 提出首个面向复杂工具智能体的轨迹级偏好基准Plan-RewardBench,覆盖安全拒绝、工具无关/不可用、复杂规划、鲁棒错误恢复四大任务家族,可高分辨率测评奖励模型的轨迹判别能力。
- 设计可复用的多源智能体偏好数据构建流程,融合多模型自然推演、规则扰动、最小编辑扰动三种方式,为轨迹级奖励模型训练提供标准化数据方案。
- 构建包含高质量标注与高难度负样本的数据集,通过多LLM评审团+元评审过滤+人工审核保证标签可靠性,严格控制长度、格式偏差以隔离语义失效问题。
- 完成主流奖励模型(判别式、生成式、LLM评判器)的统一测评,揭示不同模型在长时序轨迹下的性能退化规律与典型失效模式,验证专用轨迹级奖励建模训练的必要性。
研究方法
1. 任务设定
将基准定义为轨迹成对偏好任务,每个样本包含工具环境、多轮用户交互、两条候选轨迹,依据规划质量、工具接地性、恢复行为、拒绝质量等标准给出金标准偏好标签,支持成对比较与单点打分两种评估模式。
2. 数据来源与构建
- 种子数据:基于Toucan项目的真实MCP工具注册信息与工具执行结果;
- 候选轨迹生成:使用Qwen-Agent、OpenAIAgent运行多模型、多采样参数推演,获取自然成功与失败轨迹(占比70%);
- 高难度负样本构建:
- 规则扰动:注入约束丢失、参数错误、盲目重试等可控失效;
- 最小编辑扰动:对高分轨迹小幅修改,保留风格同时引入特定缺陷;
- 轨迹过滤:剔除格式错误、执行失败等异常样本,统计长度、轮数等特征用于分层分析。
3. 场景家族与标注
- 四大场景:安全拒绝、工具无关/不可用、复杂规划、鲁棒错误恢复,各场景设计专属评判规则与负样本类型;
- 标注流程:多LLM评审团1-5分打分→元评审处理分歧→人工分层审核→成对组装(控制难度与偏差)→独立成对校验确认标签。
4. 评估方案
- 测评模型:判别式奖励模型(DRM)、生成式奖励模型(GRM)、通用LLM评判器;
- 输入表示:统一提供工具环境、对话历史、完整轨迹,固定环境与用户意图,仅对比智能体轨迹差异;
- 指标与偏差控制:核心指标为成对准确率,采用A/B交换缓解位置偏差,按轨迹长度、轮数、场景难度分层分析。
研究结果
- 整体性能:Plan-RewardBench是严苛测评基准,无模型在所有维度占优,最优模型Qwen-Plus整体准确率69.96%,长时序复杂规划任务上模型普遍难以突破70%。
- 模型类型差异:
- 通用LLM评判器整体表现最优,但长上下文退化最明显;
- 大参数量判别式奖励模型(Inf-ORM-Llama3.1-70B)竞争力强,准确率69.21%,在错误恢复场景表现突出;
- 开源判别式奖励模型在安全拒绝场景接近随机水平。
- 场景表现:
- 安全拒绝场景极化最严重,模型准确率跨度40.69%–84.80%;
- 工具无关场景易受“努力偏差”影响,偏好冗余工具调用;
- 复杂规划场景随轨迹长度增加,模型难以跟踪动态约束更新;
- 错误恢复场景模型难区分盲目重试与智能修复。
- 长度敏感性:轨迹长度小于4k tokens时性能稳定,超过32k tokens后准确率急剧下降,部分模型低于随机水平;成对LLM评判器退化比单点判别式模型更剧烈。
- 下游验证:在BFCL v4工具调用任务的best-of-N重排序中,Plan-RewardBench上表现更好的评判器,下游任务提升更显著。
总结与展望
本研究提出Plan-RewardBench轨迹级奖励建模基准,填补了工具型智能体长时序轨迹奖励模型评估的空白,通过严谨的数据集构建与统一测评,证实现有奖励模型在轨迹级判别上存在显著缺陷,长时序规划、动态约束跟踪、安全拒绝等能力亟待提升,为智能体对齐研究提供了关键测评与数据支撑。
局限性
- 复杂规划的金标准标签存在一定主观性;
- 工具注册库未覆盖所有专有API;
- 场景分布非均匀,安全拒绝样本量较小;
- 当前仅支持英文、纯文本工具轨迹。
未来展望
- 拓展至多模态、多智能体场景的轨迹级奖励建模;
- 基于本基准训练专用轨迹级奖励模型,提升长时序智能体对齐效果;
- 完善更多工具环境与任务家族,扩展基准覆盖范围;
- 结合本基准的难度分级,设计课程学习式奖励模型训练方案。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号