基于DH进行机械臂运动学分析示例


REF:SCARA机器人运动学建模与仿真分析
01
scara机械臂介绍
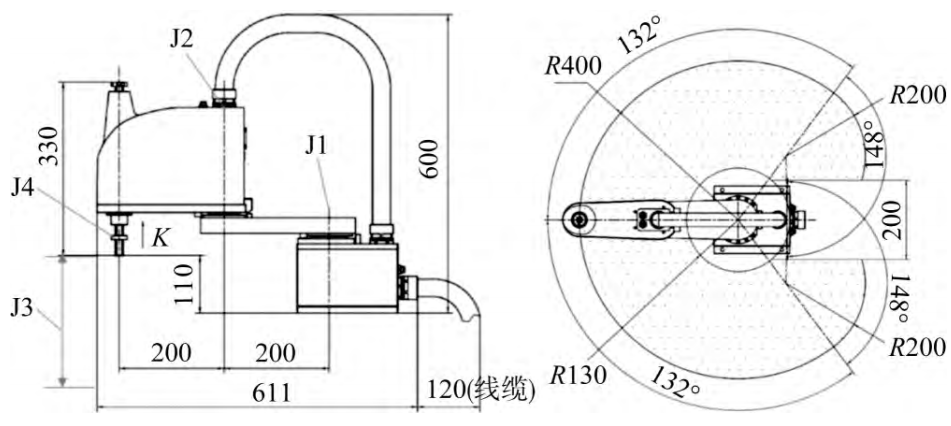
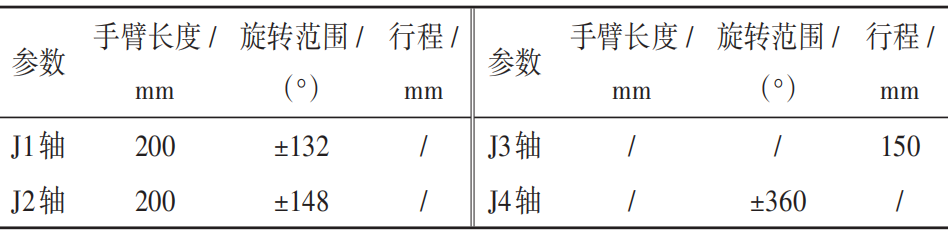
当前选择的scara臂为众为兴 AR4215 SCARA 机器人,首先采用 MDH 法建立了机器人的运动学模型,通过齐次坐标变换的方法获得了 SCARA 机器人的运动学方程,其中机器人的工作空间和参数如下:
02
DH矩阵
对于给定的机器人,已知几何参数和关节变量,确定其末端位姿的过程成为机器人正运动学分析。
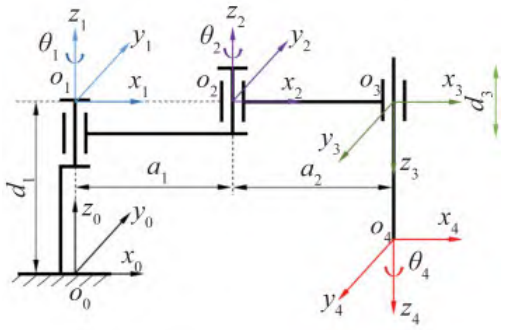
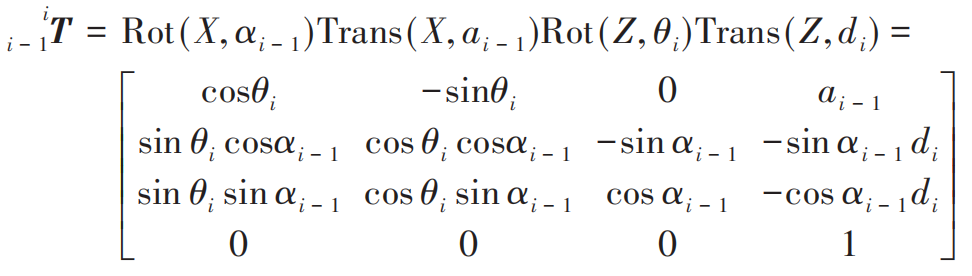
坐标系{i-1}相对于自身的坐标轴做旋转或者平移变换到坐标系{i},根据齐次坐标变换可知,坐标系{i}相对于坐标系{i-1}的转换矩阵T,即D-H矩阵通式为:
03
运动学建模
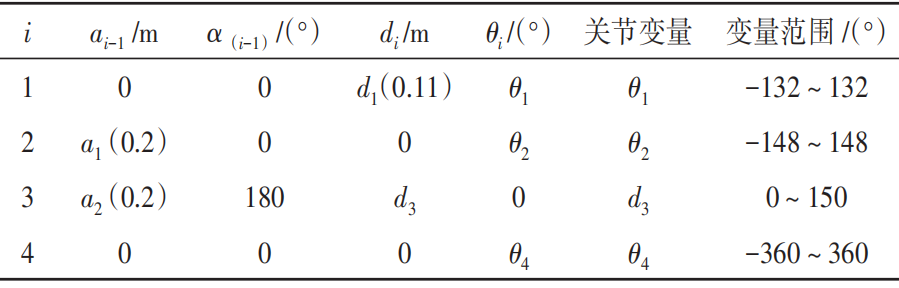
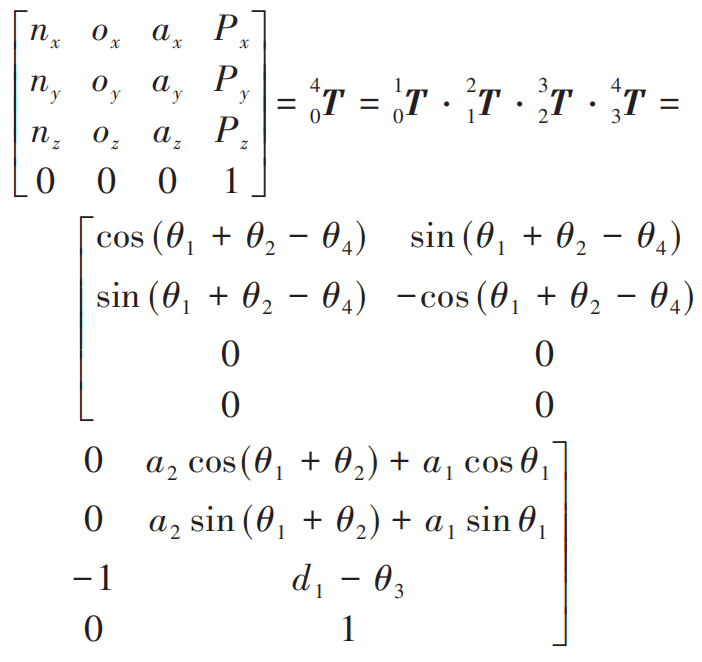
基于scara机械臂确定 D-H 参数,将 n 个 D-H 矩阵按顺序相乘,即可获得其运动学模型,因此 SCARA 机器人的运动学齐次方程的模型如下:

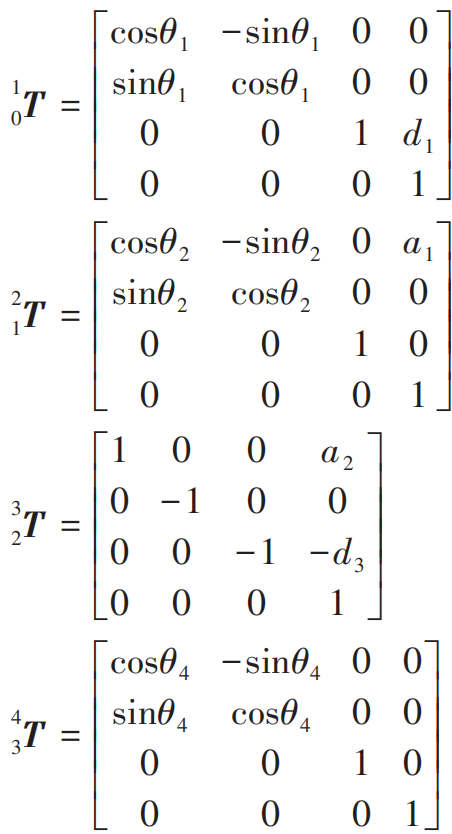
运动学方程中,a1,a2,d1 为其几何参数,通过机器人关节变量[θ1 θ2 d3 θ4],可以计算出机器人末端位姿
04
Matlab 运动学仿真
Matlab robotics Toolbox 中的 Link 函数构建 SCARA 机器人连杆仿真模型。
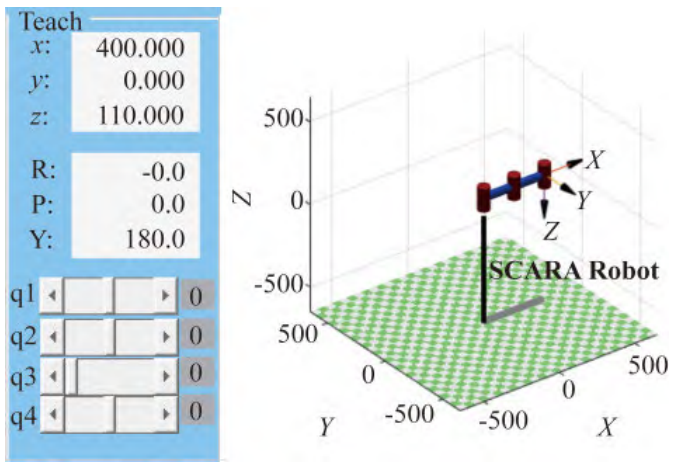
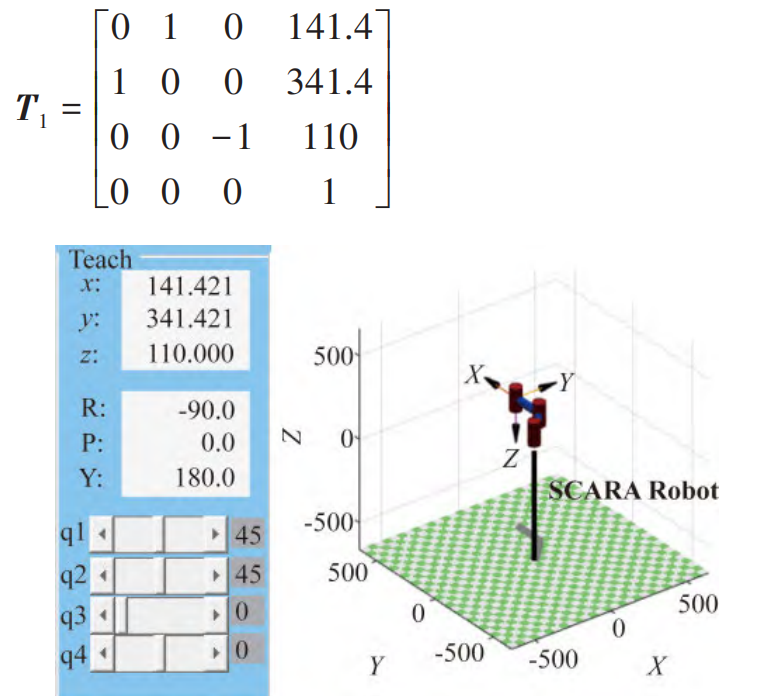
设 SCARA 各关节位置为 Q = [ θ1 θ2 d3 θ4 ],运用函数 fkine 进行运动学仿真计算 Q1 = [π/4 π/4 0 0] 状态下 SCARA机器人末端位姿 T1,DH矩阵计算结果跟仿真一致,证明所建立的 SCARA 机器人 D-H坐标系是正确的,正运动学模型也是正确的
Matlab robotics Toolbox 中 ikine函数可以进行运动学逆解,不过,默认只有其中一组解,不能处理机器人多重解的问题,由于scara臂本身的构型,默认情况,在奇异点外都有两组逆解,可以使用Solidworks建模,并导入 Process Simulate后,在仿真环境设置运动学参数后,可以看到特定末端坐标情况下的多组关节逆解。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-02-26,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号