近年一些用于农业采摘的复合机器人


REF:棚架葡萄高速切接采收机器人设计与试验
01
国外葡萄采收机器人
- 1995 年,日本冈山大学研制,通过机器视觉识别和精细运动控制,夹剪一体末端执行器(刀刃剪断葡萄果梗、底部夹块捏紧剪下的果梗)实现对准葡萄果梗采摘

- 2016 年,不列颠哥伦比亚大学研发,机器人的 5 自由度机械臂,通过高精度视觉伺服牵引夹剪一体末端执行器定位、采摘葡萄,验证了基于高精度视觉伺服控制的手 -臂采收方案可行性

- 2020 年,米兰理工大学和法国 Vitirover 公司 合作研制,采用 7 自由度机械臂,同样通过视觉伺服,但夹剪一体末端执行器由一对柔性夹指以及平行于夹指上方的刀刃组成,通过控制夹指捏合力度与时序精准地剪断并夹捏果梗

- 2021 年,希腊大学 研制,机器人配备 7 自由度机械臂,通过视觉伺服控制夹指夹捏并剪断果梗,然后机械臂牵引夹捏住果梗的末端执行器转运至果箱

02
国内葡萄采收机器人
- 江苏大学团队研制,6 自由度机械臂搭载末端固定夹剪一体末端执行器,通过葡萄的“梗 - 果”综合力学模型来准确预测葡萄果穗在采摘时的振动行为和果梗应力分布,解决葡萄果穗在夹剪采摘过程中的振动和果粒脱落问题

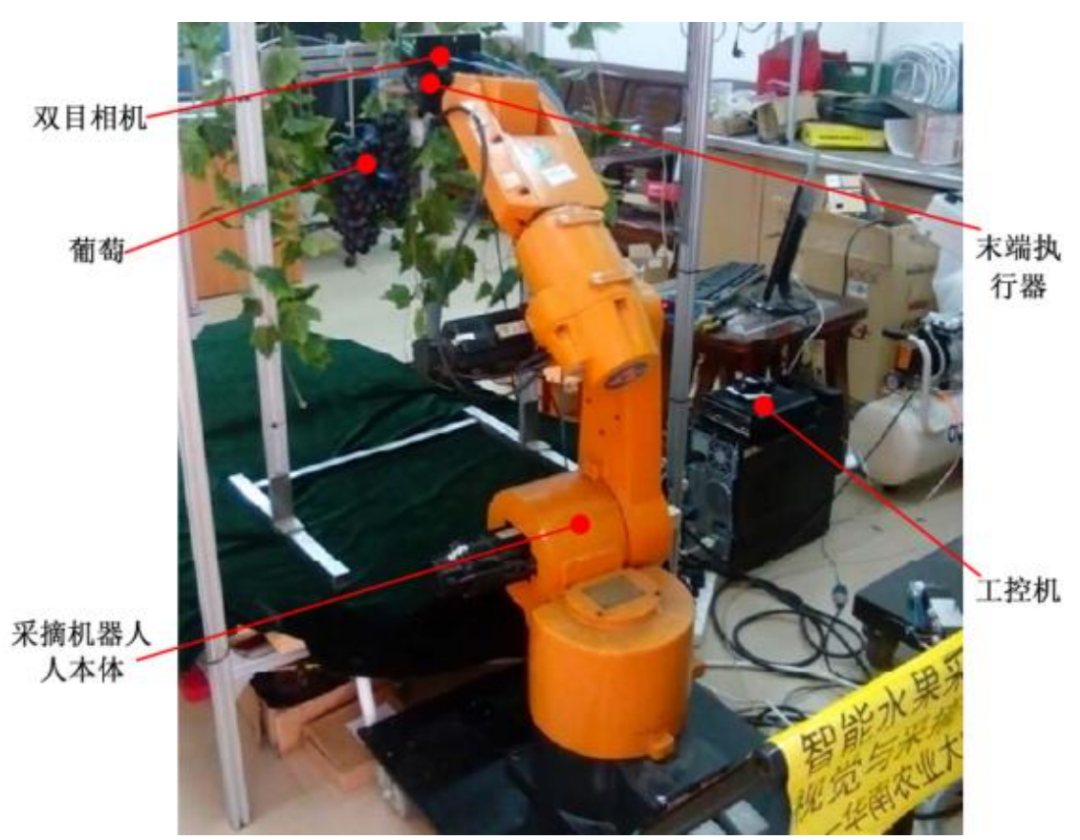
- 2017 年,华南农业大学研发,配备一组末端固定夹剪一体末端执行器的 6 自由度机械臂,采用基于人工蜂群优化模糊聚类的图像分割方法和 Adaboost-MutipleColor 集成学习算法,通过机器视觉识别、定位葡萄的果梗,相比早期的视觉检测方案大幅提高了视觉识别葡萄的速度和准确性
- 2022 年,长三角智慧农业研究院 研发,6 自由度机械臂配备一组末端固定夹剪一体末端执行器

- 2022 年,浙江圣炫农业科技有限公司 研制,6 自由度机械臂配备末端夹剪一体末端执行器 ,深度相机以眼在手上配置模式固定在末端执行器上方。机械臂根据设定采摘路线自动绕行避障,并识别目标葡萄是否成熟,当机器视觉检测到葡萄成熟再定位葡萄果梗采摘

- 2023 年,深圳越疆机器人有限公司 研制,6 自由度机械臂配备末端固定夹剪一体执行器

- 2023 年,江苏大学研制,使用两组 6 自由度机械臂作为双臂机械手,牵引夹剪一体末端执行器并行采收作业,各末端执行器均配有柔性夹指和剪刃

03
草莓采摘机器人
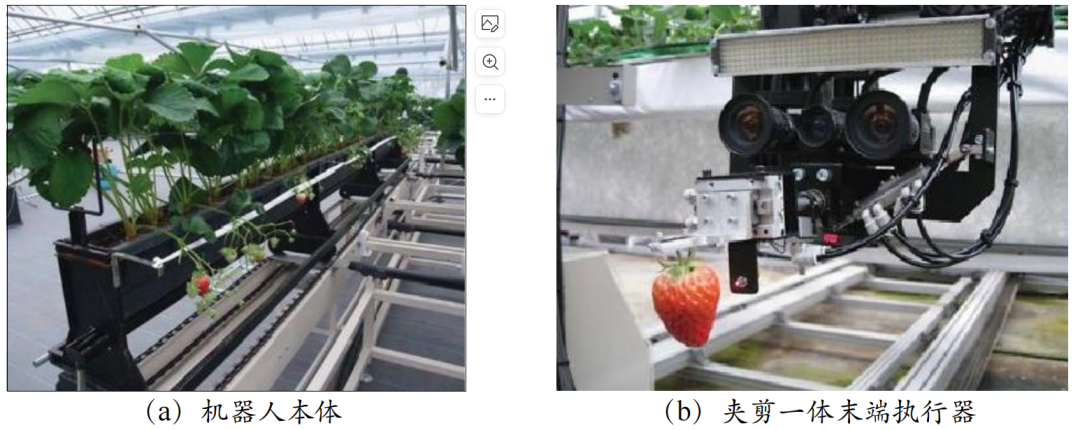
- 2012年韩国农科院研制,3 自由度直角坐标机械臂配备一组末端固定夹剪一体末端执行器 ,通过双目立体视觉判断草莓与末端执行器之间的距离
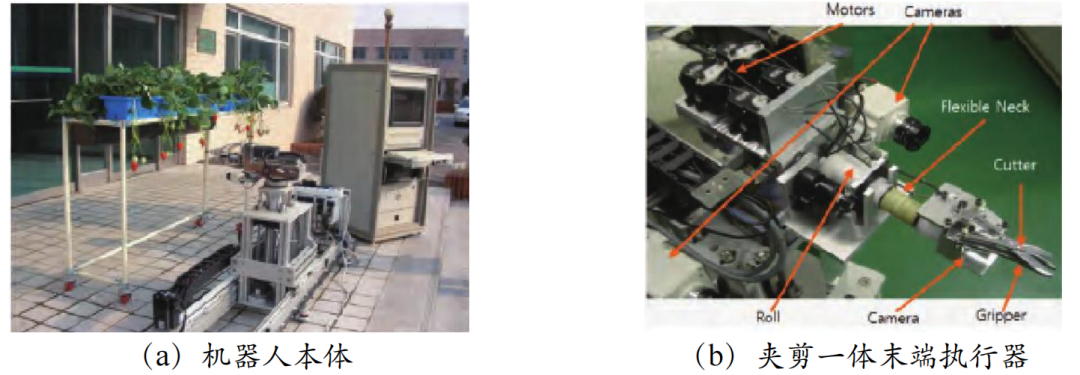
- 2014 年, Shigehiko Hayashi 与 Satoshi Yamamoto研制 ,通过眼在手上的 RGB-D 相机对高架草莓进行实时检测定位,由安装在滑轨上方的直角坐标机械臂牵引夹剪一体末端执行器沿着滑轨移动并采收高架草莓
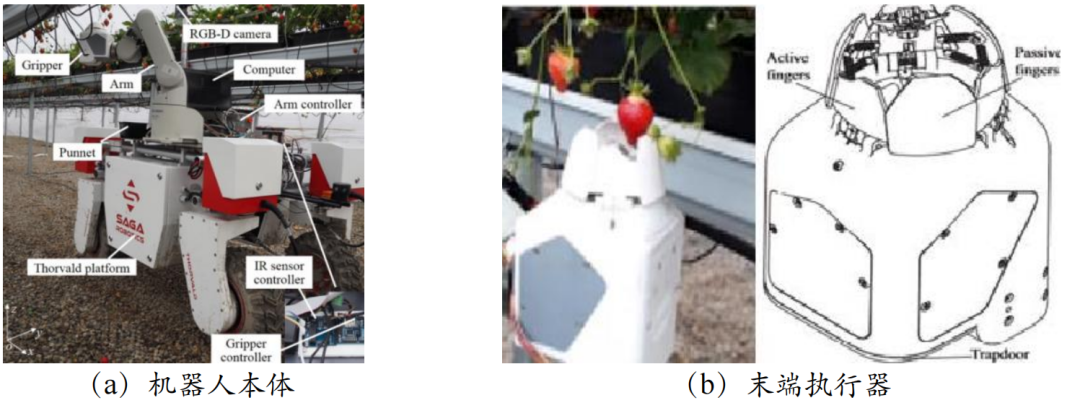
- 2019 年,挪威生命科学大学 与美国明尼苏达大学 研制,其末端执行器分别由三个主动盖指、三个被动盖指和内部切割刀头组成,采摘时三个主动盖指和三个被动盖指同时张开并包裹住草莓,手指闭合吞咽草莓的同时刀头切断草莓果柄,采摘的草莓落入末端夹持器内部的收集器中
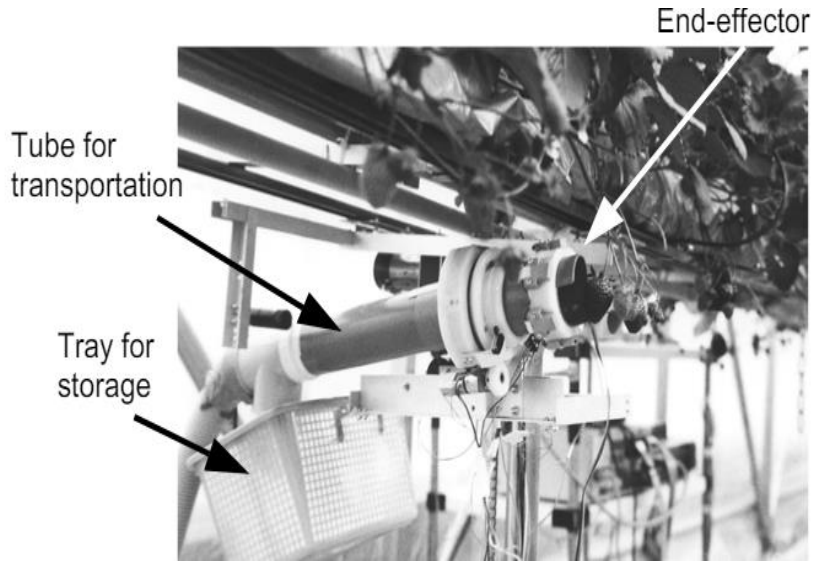
- 2005 年,日本冈山大学研制,由直角坐标机械臂牵引吸入 - 旋切式末端执行器采收,末端执行器前端的管状吸头首先通过真空装置产生的负压吸附住草莓果实,然后通过末端执行器旋转调整草莓果实角度将果柄引导至圆盘刀切割位置将果柄割断,采下的草莓顺着末端执行器底部的管道滚落至收集容器
04
番茄采摘机器人
- 2015 年,东京大学开发,仿人型双臂番茄采摘机器人,两组7 自由度机械臂配备末端装配夹剪一体末端执行器 ,并在头部和腕部分别安装 Xtion 和 Carmine 体感摄像头,模拟人工采收农艺要求进行采收作业

- 2015 年,日本松下公司开发,两组自研 6 关节机械臂配备装配夹剪一体末端执行器,由头部的 RGB-D 相机识别番茄果梗,通过视觉伺服控制两组机械臂并行采收作业,夹剪番茄果梗收获。

- 2024 年,南京农业大学研制,6 关节机械臂配备一组装配夹剪一体末端执行器 ,工作时机器人通过机器视觉识别每一颗草莓的成熟度并定位采摘点

- 2023 年,苏州博田机器人公司 开发,6 关节机械臂配备一组装配夹剪一体末端执行器,通过深度学习算法控制机械臂实现对果实的定位和夹剪

05
其它农产品采摘机器人
- 浙江工业大学开发,一种篱壁黄瓜采摘机器人,4 自由度机械臂配备一组装配夹剪一体末端执行器 ,基于 LMBP 神经网络对采摘机械手进行运动学和动力学分析,以解决机械臂采摘定位精度低的问题

- 2022 年,佛山市中科农业机器人与智慧农业创新研究院开发,一种果园荔枝采摘机器人,6 自由度机械臂配备一组装配夹剪一体末端执行器 ,模拟人手臂,利用视觉和人工智能算法自主规划采收路径,并对阻挡的果树枝干自主避障

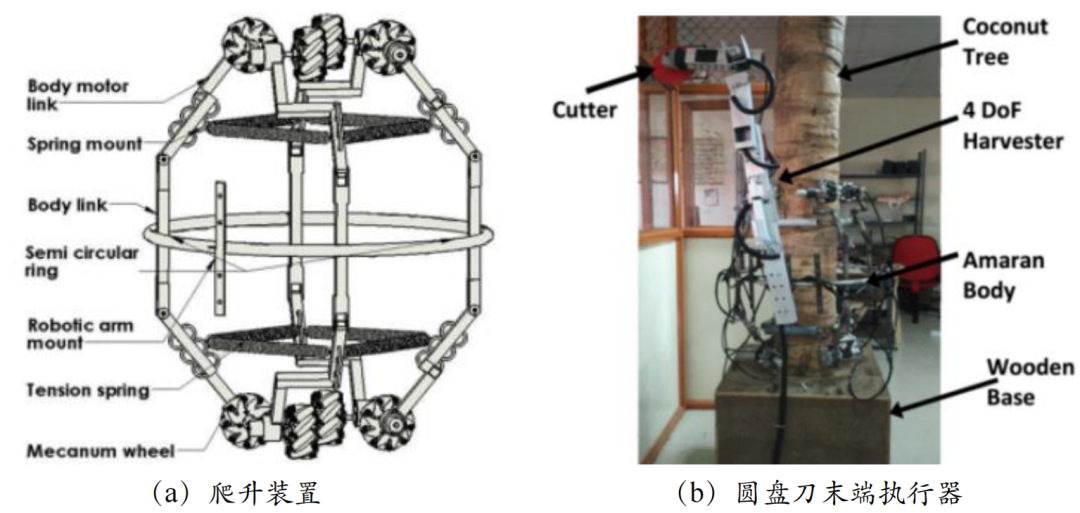
- 2020 年 , 人道主义技术( HuT )实验室研制,一种椰子树自主攀爬收割机器人,针对成熟椰子树的树干笔直、没有额外树枝且椰子采下后摔落地面不会损伤的生长特征,该机器人采用环形框架结构的轮式机身沿椰子树树干向上攀爬至椰子树树冠,由固定在圆盘刀末端执行器上方的 RGB-D 相机检测生长在树冠的椰子,然后控制圆盘刀末端执行器连续割断多个椰子的果梗采摘,采下的椰子自然掉落并堆积在椰子树下方
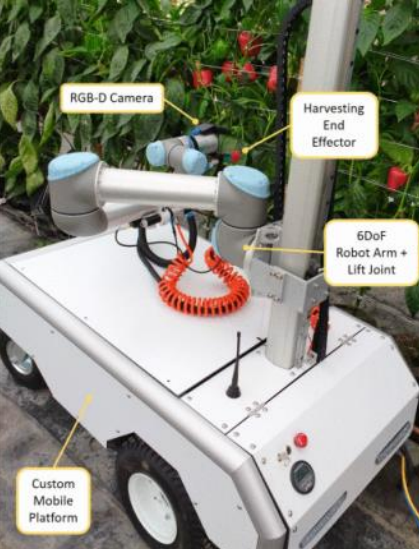
- 2017 年,昆士兰科技大学研制,一种温室甜椒自主收获机器人,末端执行器由真空吸盘和顶部电机驱动的圆盘刀组成,采摘时通过真空吸盘产生的负压在稳固甜椒光滑表面同时将甜椒的根茎牵引至圆盘刀的切割区域,然后由旋转的圆盘刀摆动至甜椒根茎处割断根茎,采摘下的甜椒直接通过末端执行器下方收集软管滑落至底部收集容器完成收获
- 2020 年,奥克兰大学研制,一款四臂猕猴桃采摘机器人,采用非对称四连杆机械臂牵引柔性夹指末端执行器,四组深度相机以仰拍姿态分别从不同区域连续检测、定位棚架网面下方的猕猴桃,机械臂基于视觉伺服驱动末端执行器定位果实后,末端执行器的四根夹指从棚架猕猴桃正下方抓握并绕根茎旋转果实拧断果梗采摘,采下的猕猴桃落入输送软管

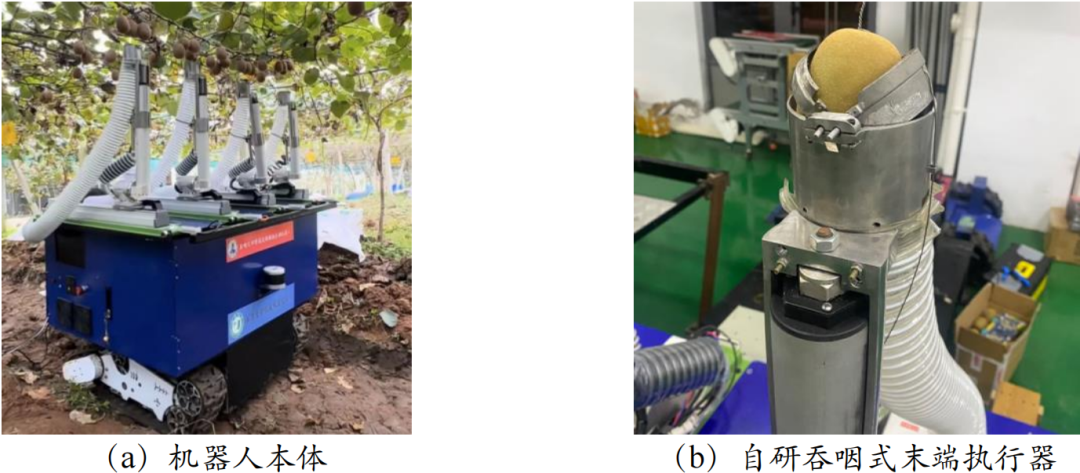
- 江苏大学研制,一种面向水平棚架的四臂猕猴桃采摘机器人,配备四组 3 自由度机械臂牵引自研吞咽式末端执行器并行采收作业,吞咽式末端执行器将猕猴桃果实完全吞咽后通过快速闭合顶部的一对半弧形切割刃,割断猕猴桃果柄采摘,采下的猕猴桃随即落入输送软管
- 2008 年, BAETEN 研制,一种苹果自动采摘机器人,机械臂末端固定有硅胶漏斗状真空气吸末端执行器,呈苹果轮廓造型的硅胶漏斗柔性约束苹果果实,并将深度相机安置于末端执行器中心,减少了图像畸变和标定问题

- 2024 年,浙江理工大学研制,一种名优茶采摘机器人,采摘作业时机械臂的末端的夹剪基于机器视觉获得的定位信息找准芽叶的叶柄,从枝头剪断芽叶实现分离,同时附在机械臂末端的负压吸管会把剪下来的芽叶通过管道吸入机械手的收集容器中

本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-02-16,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号