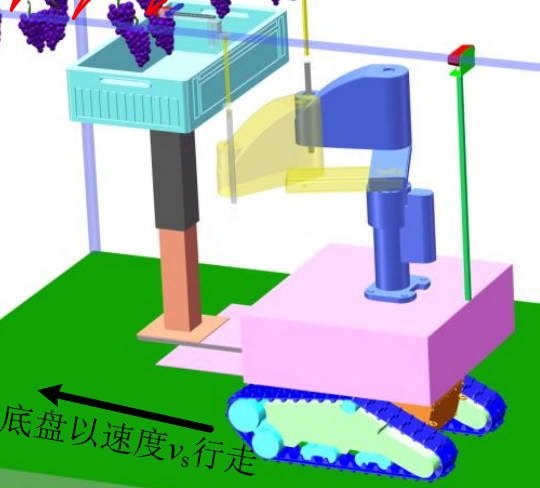
一种SCARA复合机器人系统方案


REF:棚架葡萄高速切接采收机器人设计与试验
01
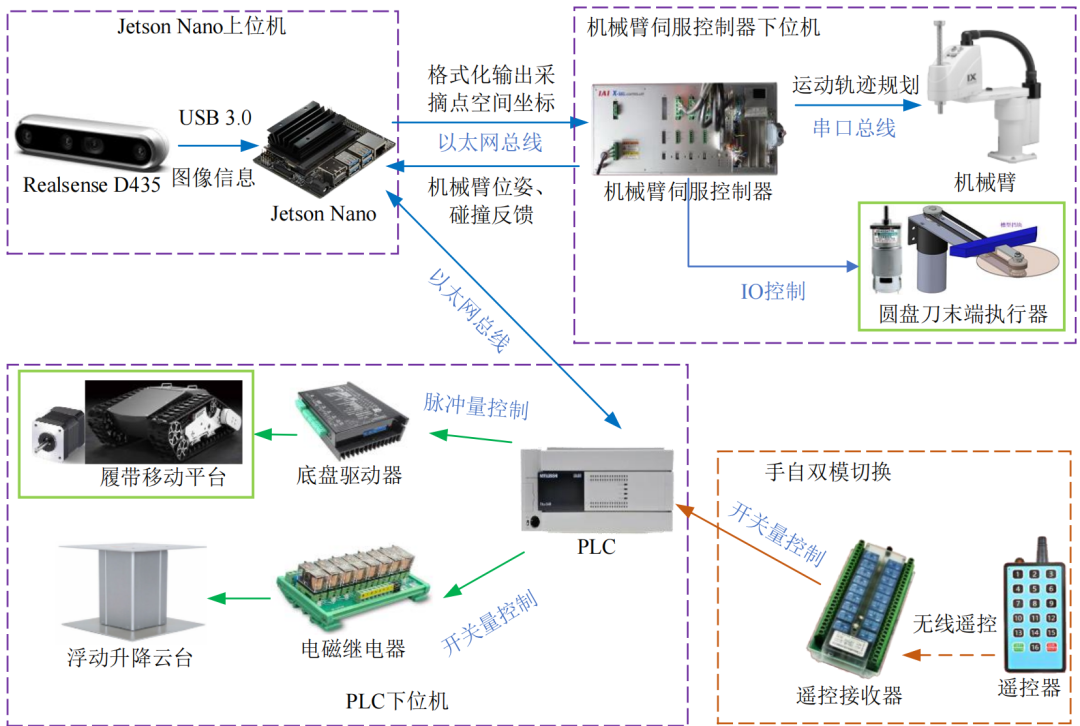
系统架构
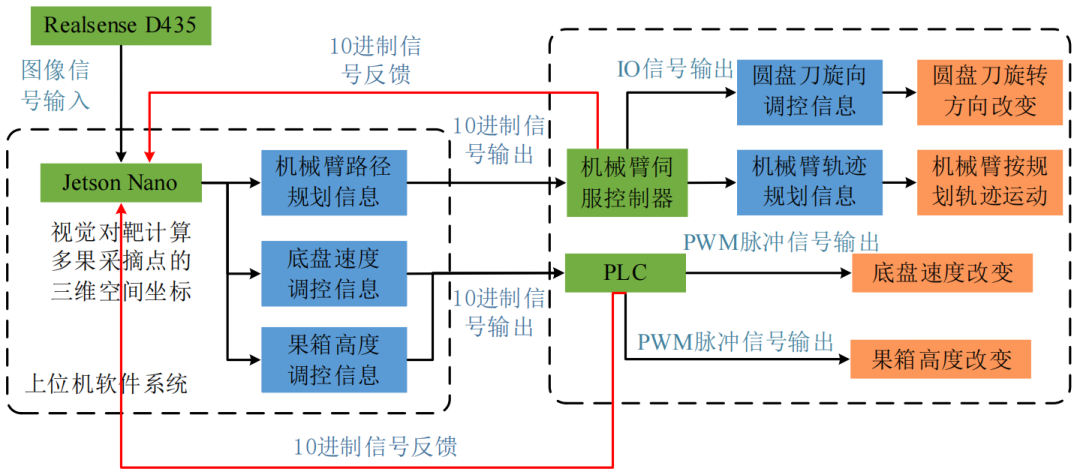
机器人的控制系统采用上位机 + 下位机的一主双从架构,上位机使用 深度相机通过 USB3.0 将图像信息传输至 Jetson Nano ,由 Jetson Nano 进行复杂任务规划计算处理,控制参数通过以太网总线输出至机械臂伺服控制器和 PLC;下位机包括 PLC 和机械臂伺服控制器,二者均通过以太网总线与上位机通信,同步执行指令并反馈工况信息。
02
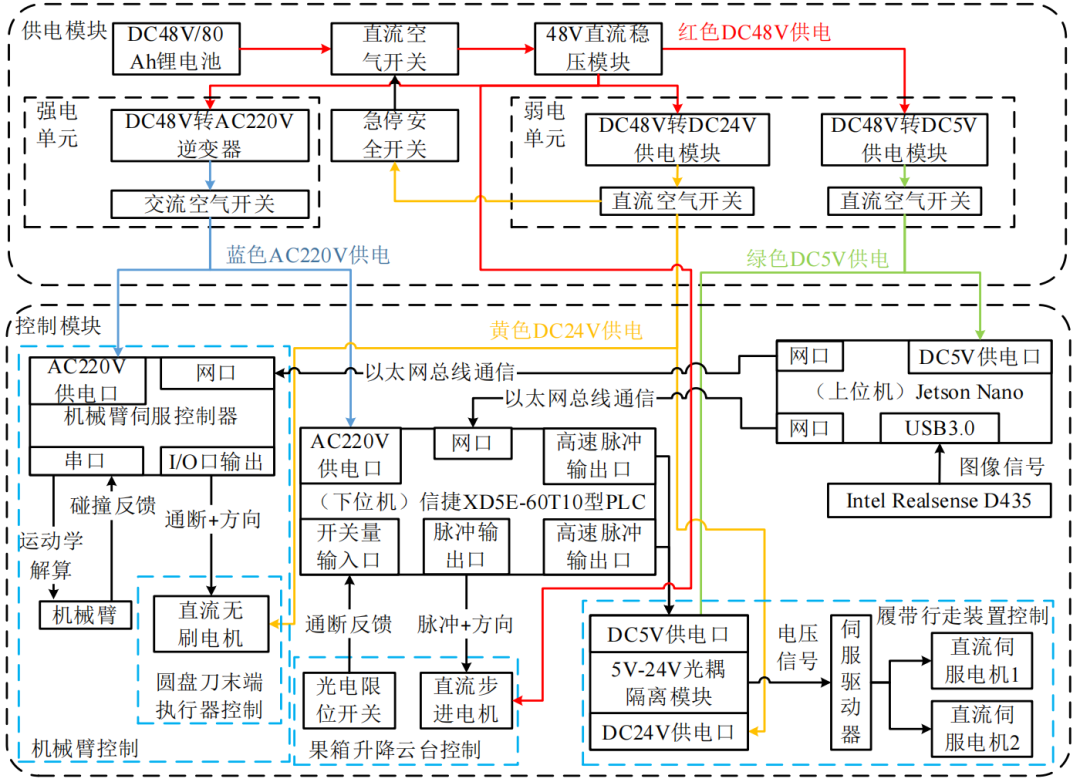
硬件架构
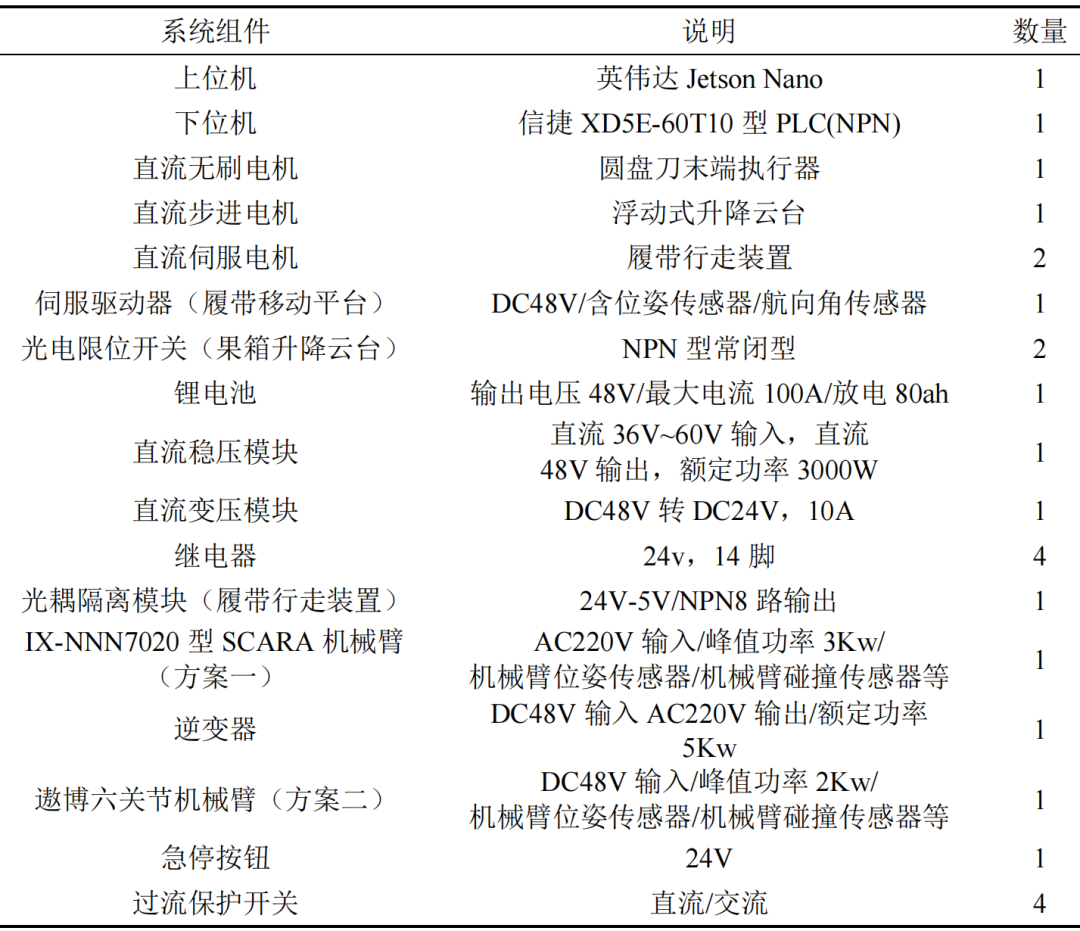
机器人硬件系统采用上、下位机二级分布式控制,上位机使用英伟达 Jetson Nano 开发板,下位机包括信捷 XD5E-60T10 型 PLC 和机械臂伺服控制器。
03
软件方案
机器人控制软件主要包括上位机软件和下位机软件,上位机软件主要负责 Jetson nano 和 realsenseD435 的信号处理,进行目标识别、任务规划、采摘运动规划、浮动接果模块高度调控和自主行走底盘速度调控
04
控制算法
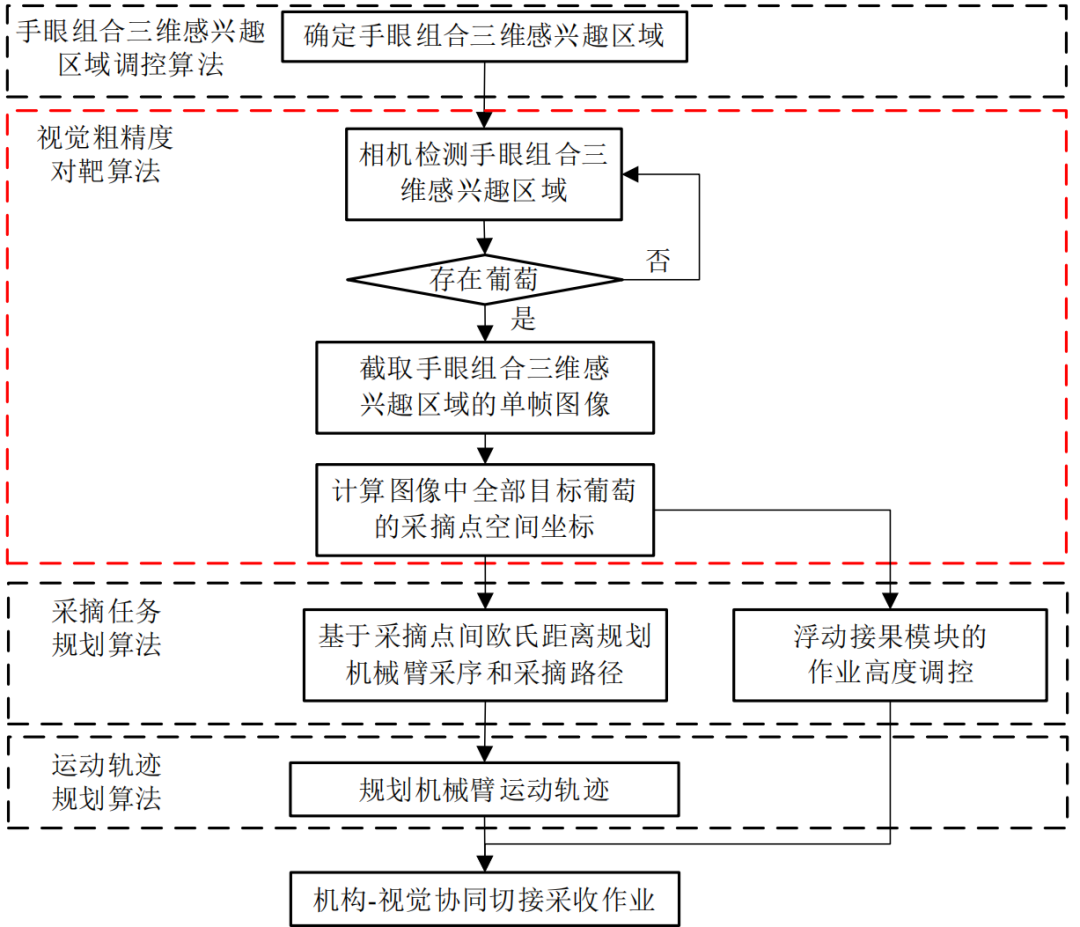
配置采摘任务规划和运动规划算法,根据目标位置相对机械臂基坐标系原点的欧氏距离,由近及远对手眼组合三维感兴趣区域内的葡萄进行采摘任务规划,当控制系统确认区域内所有任务都完成后,机器人移动至下个区域继续作业。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-02-16,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号