6轴机械臂避撞固定障碍物的关节逆结算


REF:基于 A* 算法的空间机械臂避障路径规划
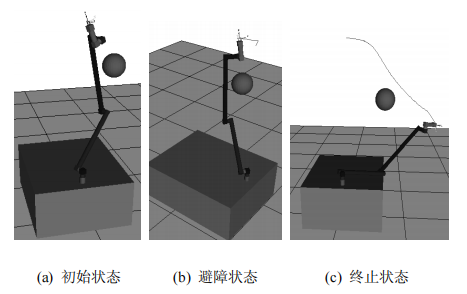
避障路径规划是指在给定的障碍条件以及起始和目标的位姿,选择一条从起始点到达目标点的路径,使运动物体能安全、无碰撞地通过所有的障碍,经典方法包括自由空间法和人工势场法。
1. 简化模型
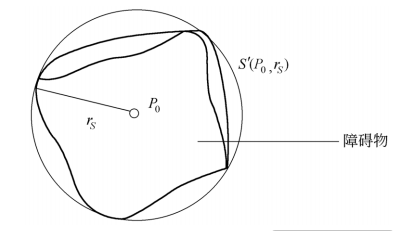
- 障碍物模型:三维障碍物一般具有不规则的几何形状,基于相同中心的最小内接球作为障碍物的替代描述
092552a68929b61e336d4065cbf0ec3e.png
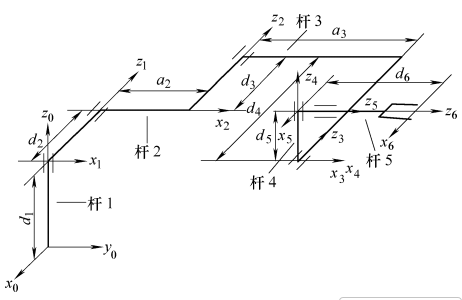
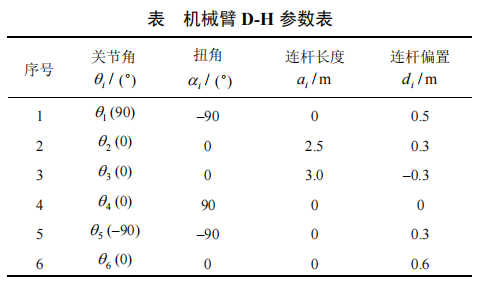
- 机械臂模型:机械臂杆件均为圆柱体,机械臂杆件碰撞模型也采用圆柱模型,构型 D-H 坐标系如下:
df8547242c64068a29d876cee1250d6e.png
14ddac00be7d3382aa6877867191e41e.png
2. 关节逆结算
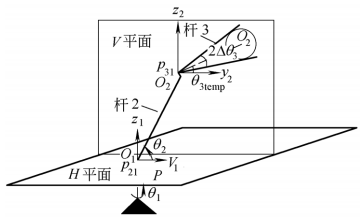
利用机械臂的几何关系,将空间障碍向关节空间的转化,求解出机械臂的自由运动空间,主要基于杆件和障碍物的几何关系,通过计算分析得出了杆件和障碍物发生碰撞条件的解析表达式,因此利用该方法求解机械臂的无碰撞路径。
b7a68ff361fefb3b7606ee033c674303.png
每个关节角的旋转均可以引起机械臂与障碍物之间碰撞的发生,采用分级讨论的方法来求解障碍物与各杆件碰撞的条件。总体思路,先求解关节 1 可能导致机械臂连杆与障碍发生碰撞的运动范围,后续各关节导致碰撞发生的情况均在该范围内讨论;在此范围之内可以推导出连杆 2 与障碍发生碰撞的条件;在连杆2与障碍不发生碰撞所对应的关节角2的范围内,讨论连杆 3 与障碍发生碰撞的条件;同理能够求得连杆 4,连杆 5 与障碍发生碰撞的条件。
b8e28894a67b1c05427ec020a7516eb5.png
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2025-12-31,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号