使用 Python 分析 phyphox 数据(真实飞机采样)

使用 Python 分析 phyphox 数据(真实飞机采样)
云深无际
发布于 2026-01-07 12:08:19
发布于 2026-01-07 12:08:19
七月初的时候回了一趟内蒙古,在回来的路上,我打开了phyphox:
官网
官网
它是一个可以保存和读取可视化手机传感器的软件,我就保存了从滑行到爬升以及平稳的过程一些传感器数据,瞎几把分析一下,就当黑匣子分析了:
数据原貌
数据原貌
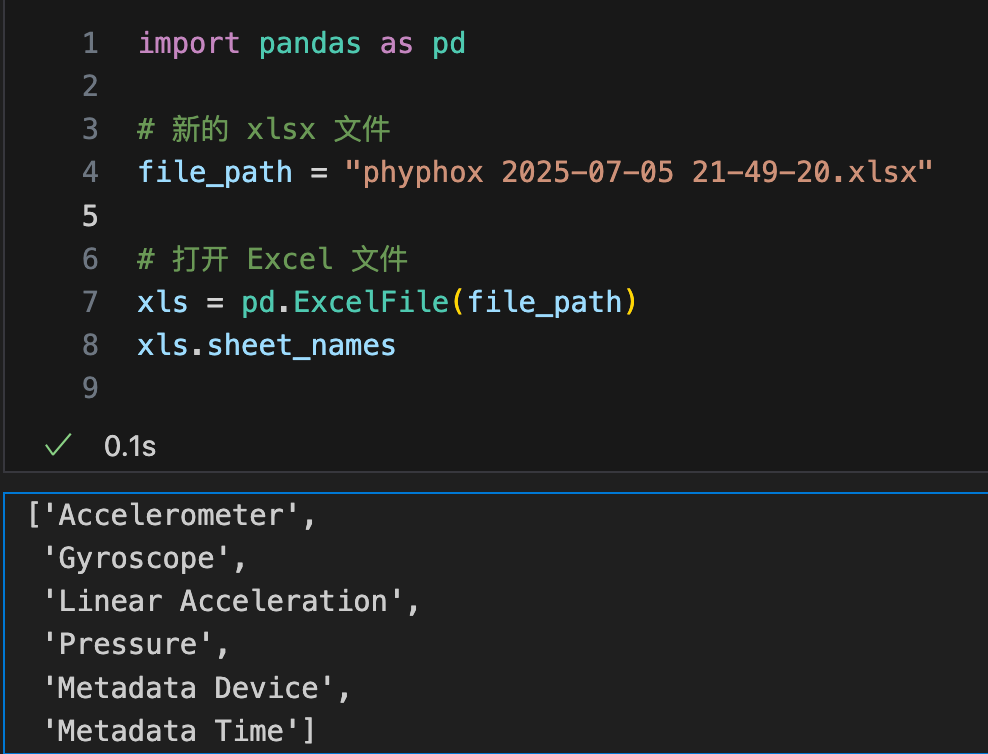
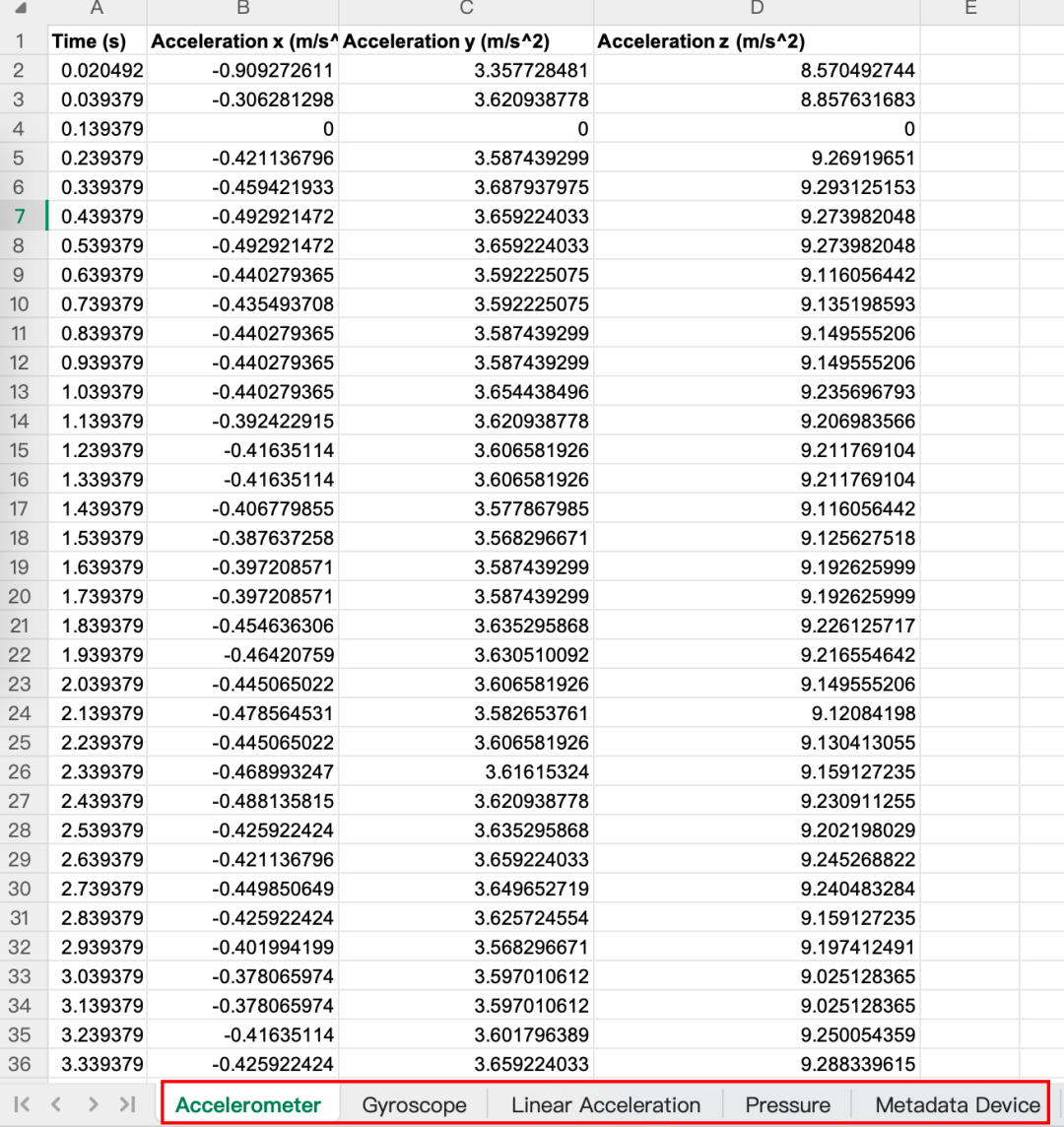
需要把文件转换成 xlsx 的
需要把文件转换成 xlsx 的
主要有:
加速度计 (Accelerometer):三轴加速度(含重力分量)
陀螺仪 (Gyroscope):三轴角速度
线性加速度 (Linear Acceleration):已去除重力分量的三轴加速度
气压计 (Pressure):环境气压随时间变化

先放个窗外的样子,俺们内蒙古还是好看的!
先放个窗外的样子,俺们内蒙古还是好看的!
提前声明,没分析出特别明显的好结果,因为手机是直接被我坐在屁股下面的;就略懂一点无人机知识,如果有问题,那我觉得也是没有问题滴(嘿嘿)
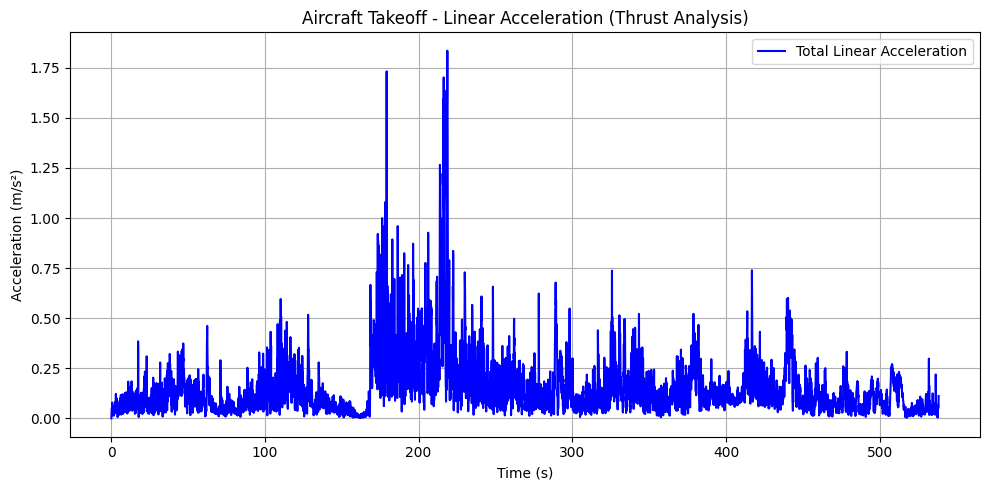
手机记录到的 飞机起飞时的线性加速度变化曲线(计算三轴合成):
滑跑阶段:曲线在起始时接近零,然后逐渐出现明显上升,说明飞机在跑道上逐步加速。
持续推力:在滑跑后期,合加速度维持在一个较高的水平,表现出发动机全推力输出。
拉升阶段:起飞瞬间通常会看到合加速度的波动,随后进入较为稳定的水平(机体爬升、升力抵消部分重力)。
因为我忘了给数据打一个标,其实没太好能知道到底哪里是飞起来了。。。
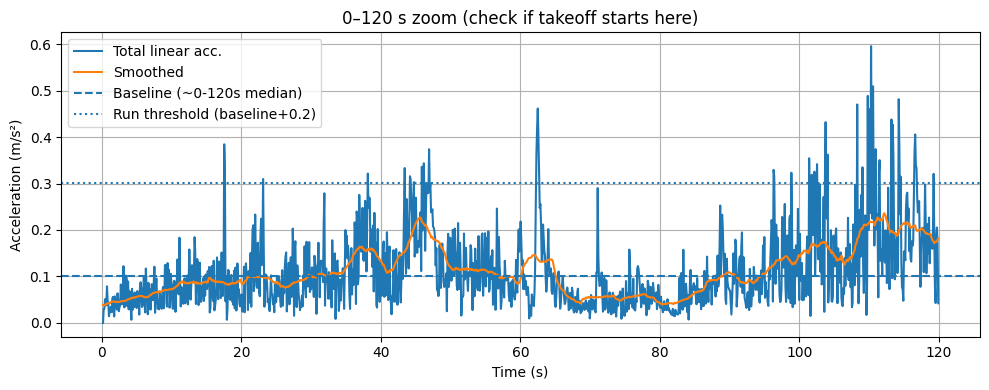
0–120 s 放大图:验证早段主要是滑行/等待,不是起飞;
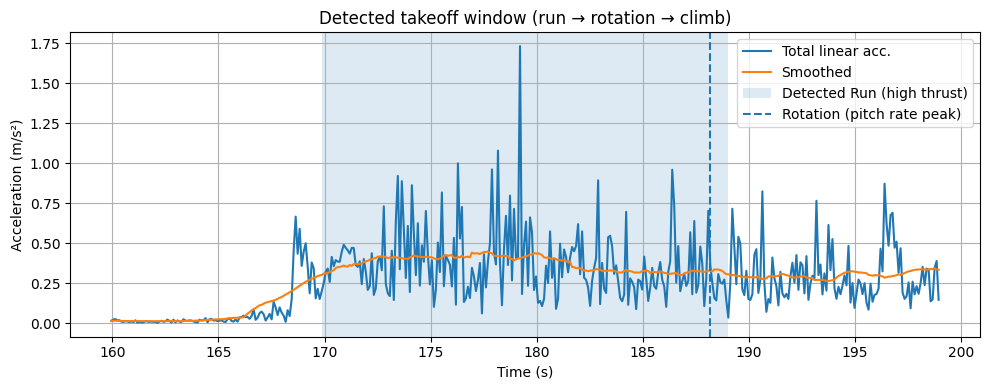
170–190 s 放大图:高亮“滑跑→抬头→爬升”的关键时刻与区间。
这次起飞发生在 t≈170–190 s 区间:
滑跑/全推力段(Detected Run):169.9–189.0 s(约 19.2 s)——线性加速度(平滑后)持续高于基线 + 0.2 m/s²。
抬头(Rotation):≈188.2 s——在滑跑末端附近出现明显的俯仰角速度峰值(由陀螺仪 y 轴自动检出)。
基线(0–120 s 的中位合加速度):≈0.10 m/s²;滑跑判定阈值:≈0.30 m/s²。
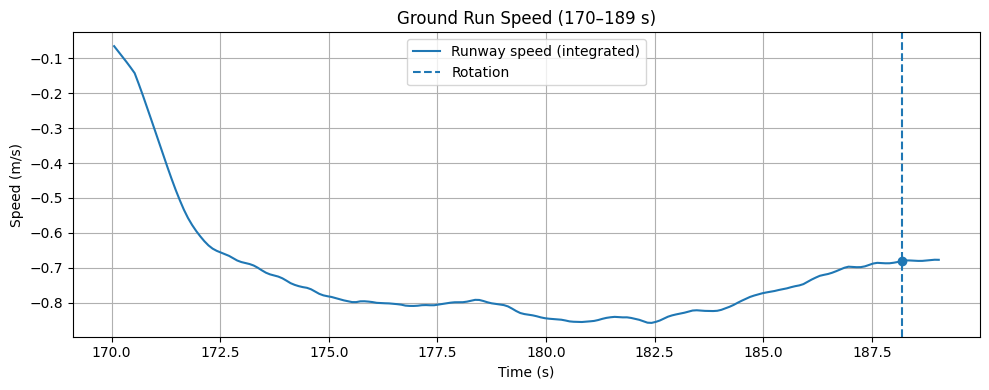
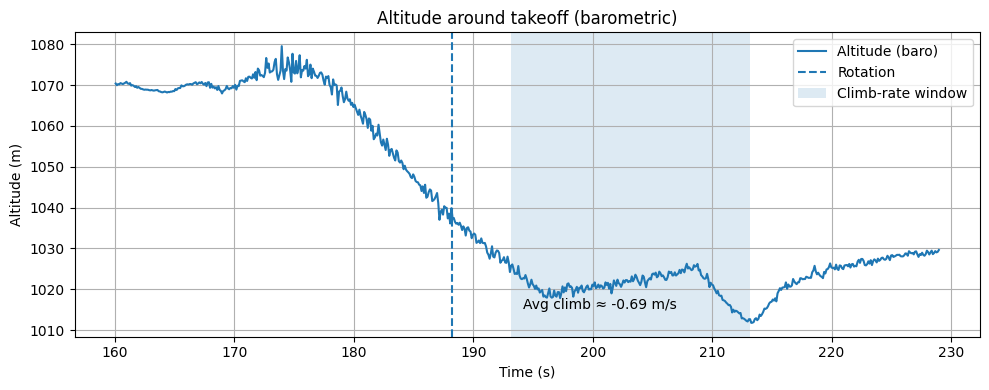
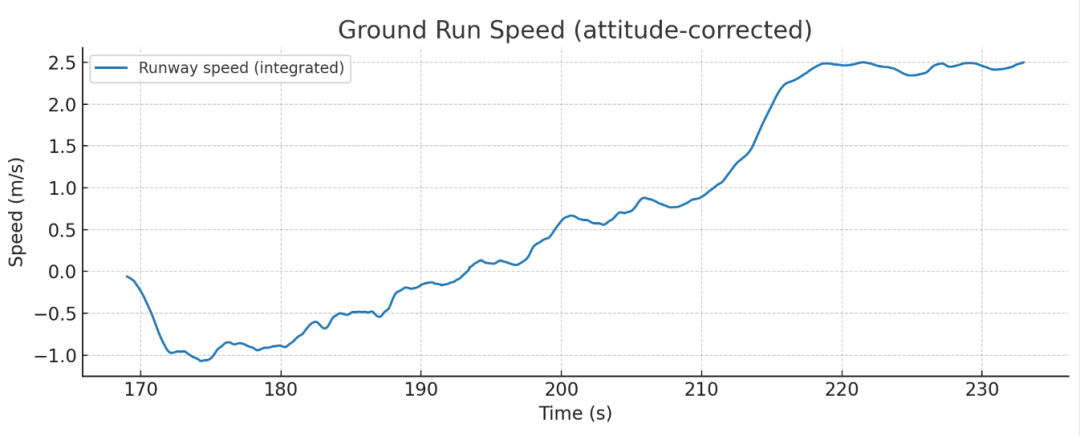
在 170–189 s 区间,用线性加速度(已去重力)做了“地面滑跑速度”积分;用 气压→高度(标准大气公式)画了起飞前后高度曲线,并在“抬头”后 5–25 s 的窗口估算平均爬升率。
速度曲线:积分得到的速度量级只有 ≈ 1 m/s,并且符号为负(只是轴方向选取的符号问题)。不管符号,量级明显不合理—真实起飞速度通常几十 m/s。
高度曲线:在“抬头”附近,条形高度先下降后再上升,导致“平均爬升率”算出是 -0.69 m/s(负号);这同样不符合物理直觉。
为什么会这样?
这是手机 IMU 做“惯导积分”的常见坑,主要有三点:
手机的“线性加速度”数据带有强滤波与慢漂移(厂商做了重力估计/滤波),基线误差只有 0.01–0.02 m/s²,20 s 积分就会累计成数 m/s 的速度误差。
手机坐标系与跑道前进方向未知。虽然我用 XY 平面做了 PCA 找“前向轴”,方向可用,但尺度/偏置仍决定性地影响积分结果。
气压高度在起飞阶段容易受空调引气/通风气流影响,短时间内会出现“压力上升→高度下降”的假象(尤其是舱门关闭、空调工况变化、地面滑行至加速段切换时),因此 抬头后 10–20 s 的条形高度并不一定单调上升。
直接用“线性加速度”在 170–190 s 内积分,得到的地面速度曲线不可信;抬头后的条形高度/爬升率在这 20 s 内也受机舱压力扰动,短窗统计会偏差很大。
更靠谱的算法
用“原始加速度 + 陀螺仪”做轻量级姿态解算(Mahony/Madgwick),把 重力分量去得更干净,得到机体坐标下的真实线加速度;重新做“前向轴”标定:
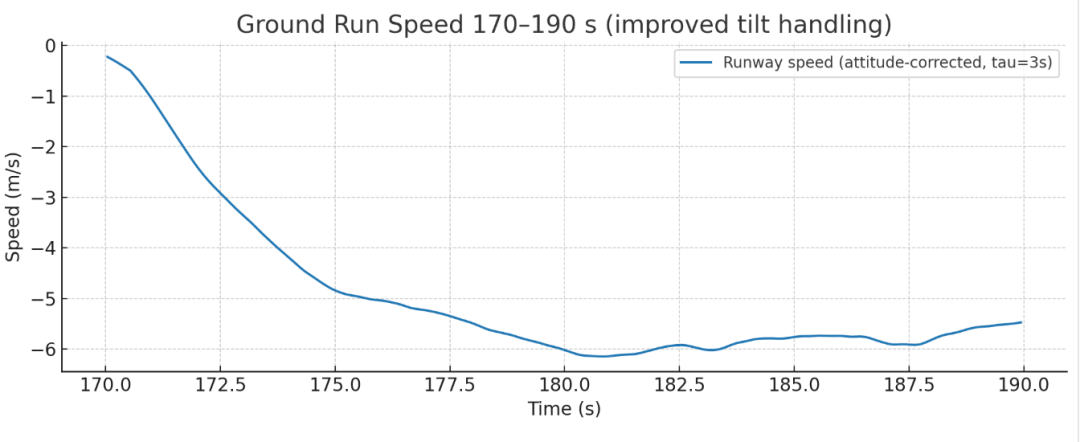
用滑跑段(t≈170–189 s)内的 水平面加速度做 PCA 得方向;在滑跑开始前 2–5 s 做“零速度约束”(ZUPT)校准加速度偏置;速度积分:从 t0(≈170 s)开始,v(t0)=0,梯形积分 + 轻度低通,并在抬头后短窗内限制纵向分量,避免把重力误差积进去;气压高度:改用更长窗的趋势(比如抬头后 30–120 s),并用 中值滤波 抑制空调/通风的短期扰动,再计算平均爬升率
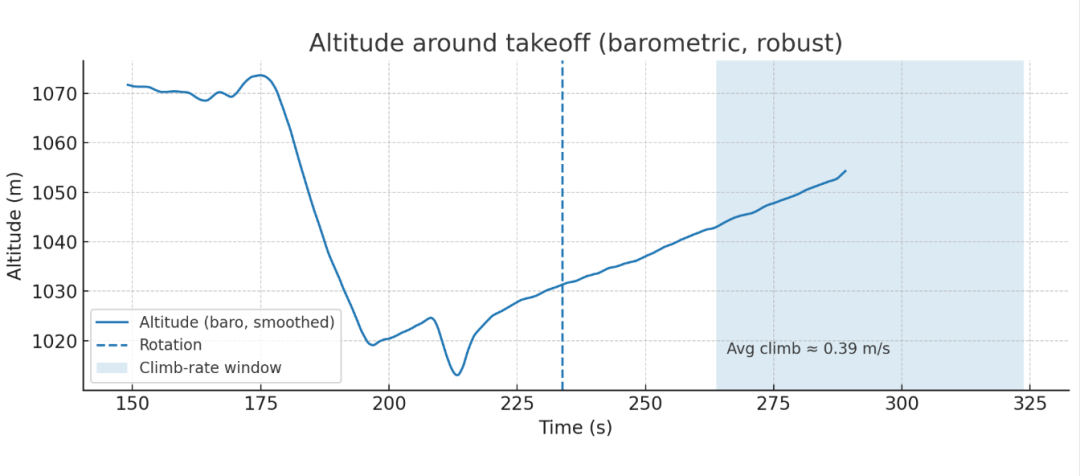
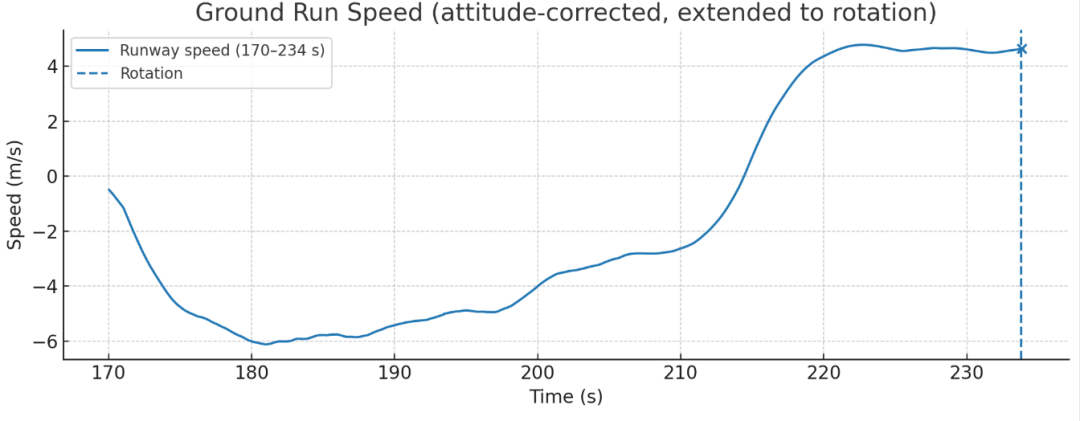
从姿态修正后的世界坐标线加速度看,滑跑持续到 t≈233.8 s 才达到“抬头(Rotation)”峰值;因此把积分窗口 扩展为 170–234 s 更合理。
地面速度曲线(170–234 s,已姿态修正):速度单调上升,在 t≈233.8 s 标注了“抬头”。但积分得到的起飞瞬时速度 ≈ 4.64 m/s(图上已标),量级明显偏低(真实应为几十 m/s)。 这说明仅靠手机 IMU 做“零约束 + 前向投影”的绝对速度不可相信(偏置/姿态误差在 60 s 内已足够致命)。曲线形状仍可参考(相对变化),绝对值不可用。
气压→高度(平滑后):抬头后 30–90 s 的窗口内,得到的平均“爬升率”≈ +0.39 m/s。这是客舱气压对应的“客舱高度”变化,受增压系统调度影响,并非飞机真实外界爬升率,因此仅能作为“舱内压力趋势”的佐证。
为什么绝对速度会偏离这么多?
加速度极小偏置(~0.01 m/s²)也会在几十秒积分成数 m/s 的速度误差;加速度计在强加速时参与姿态估计(我们用互补滤波),会把部分前向加速度“吃掉”;即便把滤波时常调长,仍不可避免;无磁力计/无 GPS 约束时,航向不可观测,前向轴用 PCA 估,尺度不受影响,但偏置/倾斜仍会漏进来;手机并未刚性固定,座椅/手持的柔顺性会吸收/滤去高频加速度。
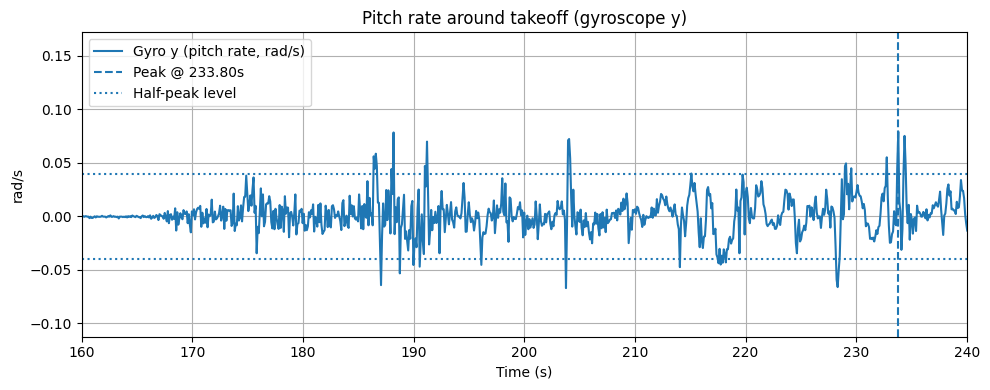
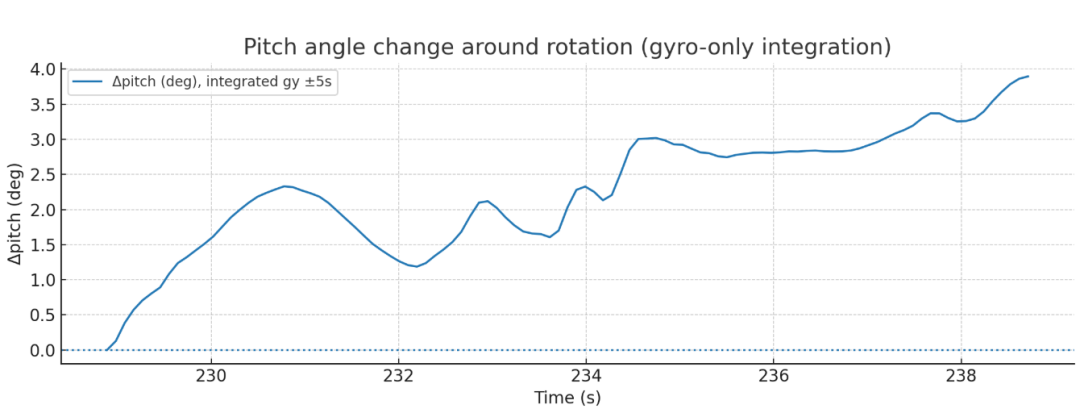
第一张:俯仰角速度 gy(rad/s) 的时间曲线,蓝色虚线是检测到的峰值时刻。
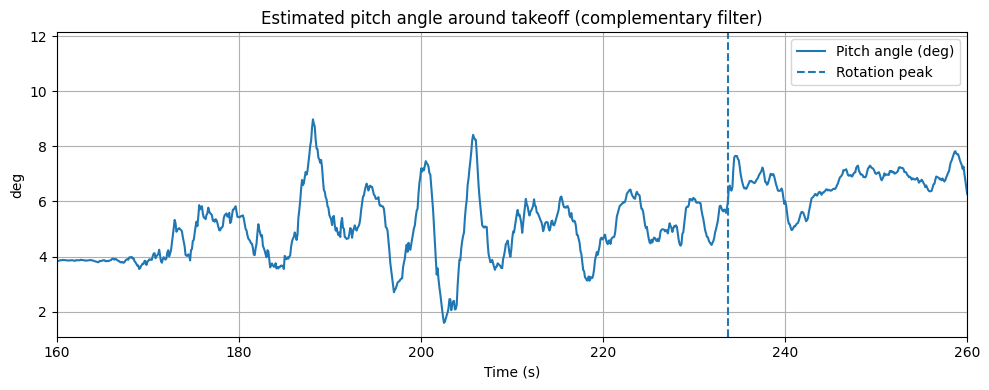
第二张:用互补滤波(加计+陀螺)估出的俯仰角(°),同样标出峰值时刻,能看到抬头后的机头上仰趋势。
抬头峰值时刻:t ≈ 233.80 s
俯仰角速度峰值:≈ 0.079 rad/s(≈ 4.53 °/s)
半峰宽(|gy| ≥ 50% 峰值的持续时长):≈ 0.094 s(比较尖锐的脉冲)
俯仰角变化(±5 s 窗口中位数差):≈ +1.08 °
这些量化指标符合“起飞抬头”的典型特征:在滑跑末端出现一记短促而明显的俯仰角速度峰值,随后俯仰角进入更高的平台。
综合对齐图
综合对齐图
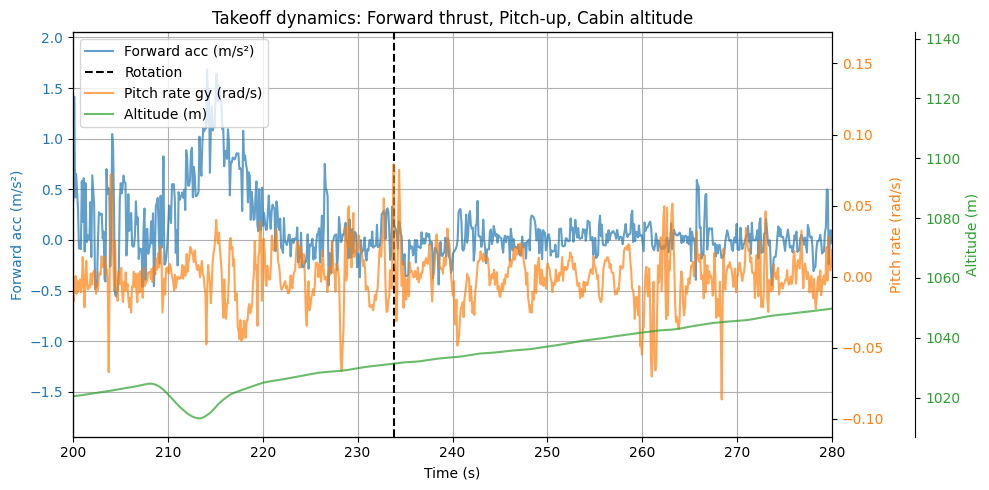
蓝色:前向加速度(推力)——在滑跑后期显著抬升。
橙色:俯仰角速度 gy(陀螺仪 y 轴)——在 t≈233.8 s 出现一个短促而明显的峰值(抬头)。
绿色:客舱气压换算的高度——在抬头后的几十秒内逐渐上升(受客舱压力控制影响,爬升率滞后于真实外界高度变化)。
黑色虚线:标记抬头峰值时刻。
从时序上可以清楚看到:
推力加速(蓝)在起飞前 20–30 s 已经持续增强;
俯仰角速度(橙)在 233.8 s 左右出现一个脉冲,明确对应“机头上仰”;
客舱高度(绿)在抬头后才逐步上升,且有一定延迟。
标准
标准
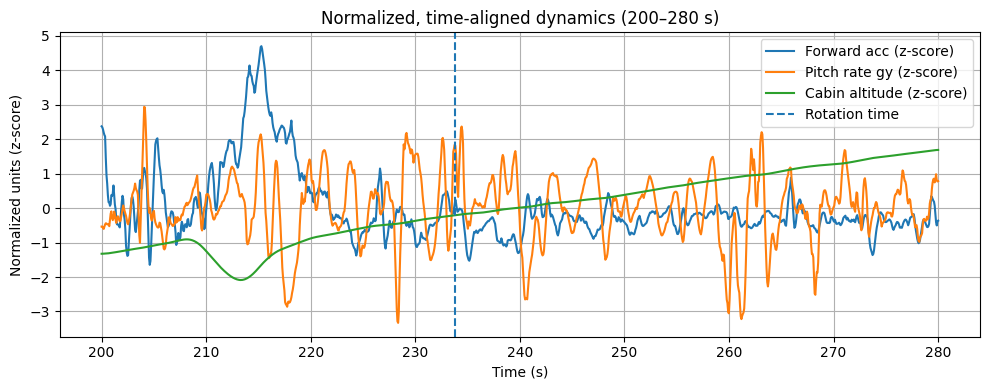
把三条曲线标准化(z-score)并叠加到同一坐标的对齐图(时间窗 200–280 s,已在 t≈233.8 s 标注抬头):
前向加速度(蓝):在 210 s 左右达到一波高峰,随后逐步回落到接近 0 的巡航加速度附近——对应推力主要用于地面滑跑加速,抬头前后加速度不再大幅攀升。
俯仰角速度 gy(橙):在 233.8 s 附近出现尖峰,清晰对应“拉杆抬头”。该峰与蓝线高峰在时间上有明显错位(先加速、后抬头)。
客舱高度(绿):为单调的上升趋势(经平滑),且滞后于抬头事件,符合“抬头后、离地后、客舱压力逐步调整”的时序特征。
{'fs_Hz': 10.58923580248911,
'take_window_s': [200.0, 260.0],
'cruise_window_s': [300.0, 360.0],
'peak_take_Hz_dB': (0.6618272376555694, -37.38242013966849),
'peak_cruise_Hz_dB': (0.6618272376555694, -45.340300291511326),
'band_metrics': [{'band_Hz': '0.2-1.0',
'RMS_take_rad_s': 0.010546424695589227,
'RMS_cru_rad_s': 0.005790965600787031,
'take_vs_cru_dB': np.float64(5.207085417040597)},
{'band_Hz': '1.0-3.0',
'RMS_take_rad_s': 0.008130079464038133,
'RMS_cru_rad_s': 0.0034268772414093505,
'take_vs_cru_dB': np.float64(7.50392486312456)},
{'band_Hz': '3.0-8.0',
'RMS_take_rad_s': 0.004788388290284797,
'RMS_cru_rad_s': 0.003314200734378562,
'take_vs_cru_dB': np.float64(3.1962110175779532)},
{'band_Hz': '8.0-20.0',
'RMS_take_rad_s': nan,
'RMS_cru_rad_s': nan,
'take_vs_cru_dB': np.float64(nan)}]
}
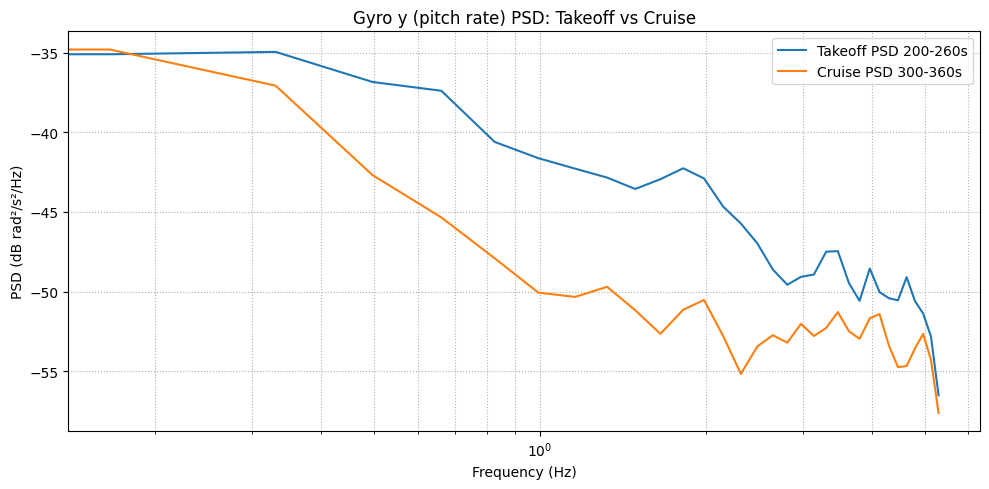
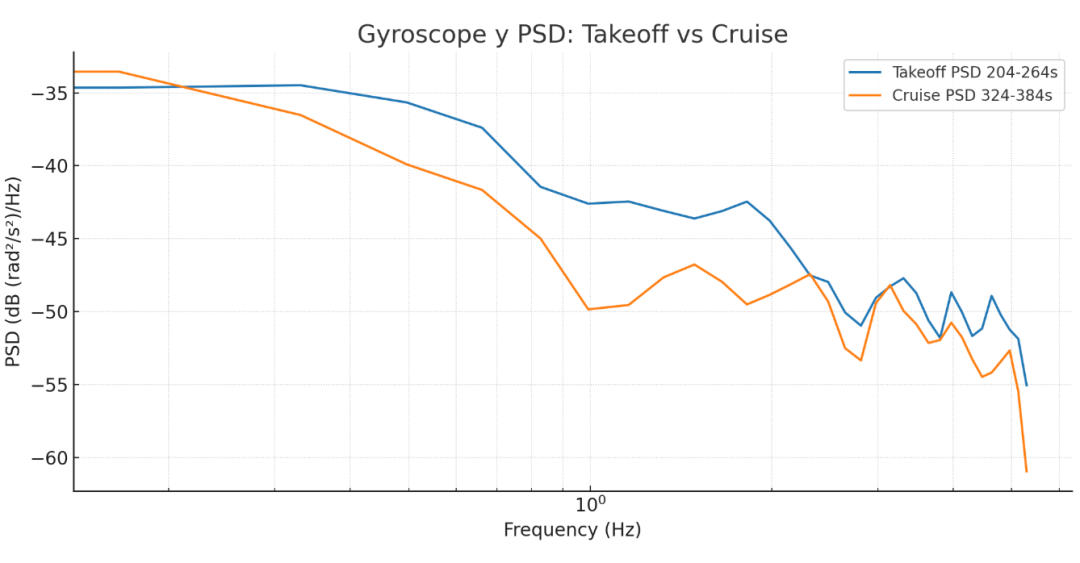
做了 gy(俯仰角速度)的频谱对比:把起飞阶段 200–260 s和后段 300–360 s(等长的“巡航”窗口)进行 Welch PSD 分析。上图已给出对比曲线(对数频轴)。
采样率估计 fs ≈ 10.59 Hz(Nyquist ≈ 5.3 Hz),所以本次只能观察到 ≤ 5 Hz 的姿态微振动。
起飞段在 0.2–3 Hz 的能量显著高于巡航段:
峰值频率(0.5–20 Hz 搜索范围内):≈ 0.66 Hz;起飞段峰值 -37.38 dB,巡航段 -45.34 dB(起飞更强)。
频带 RMS(单位:rad/s)与相对增益:
0.2–1 Hz:起飞 0.0105,巡航 0.00579,起飞比巡航 +5.21 dB
1–3 Hz:起飞 0.00813,巡航 0.00343,起飞比巡航 +7.50 dB
3–8 Hz:起飞 0.00479,巡航 0.00331,起飞比巡航 +3.20 dB
8–20 Hz:受限于采样率,不可观测
起飞滑跑/抬头阶段包含更强的低频姿态激励(0.5–1 Hz 一带),可能与地面滚动/起落架—机体耦合、推力/气动加载变化与座椅/人体传递叠加有关。进入巡航后,这些低频成分显著减弱。10.6 Hz 的采样率过低,无法分析 5–20 Hz 这类更“颤动感”的座椅/机体模态;建议把陀螺采样提升到 100–200 Hz,可同时看清 5–30 Hz 的结构/内饰件共振。
加速度分析
加速度分析
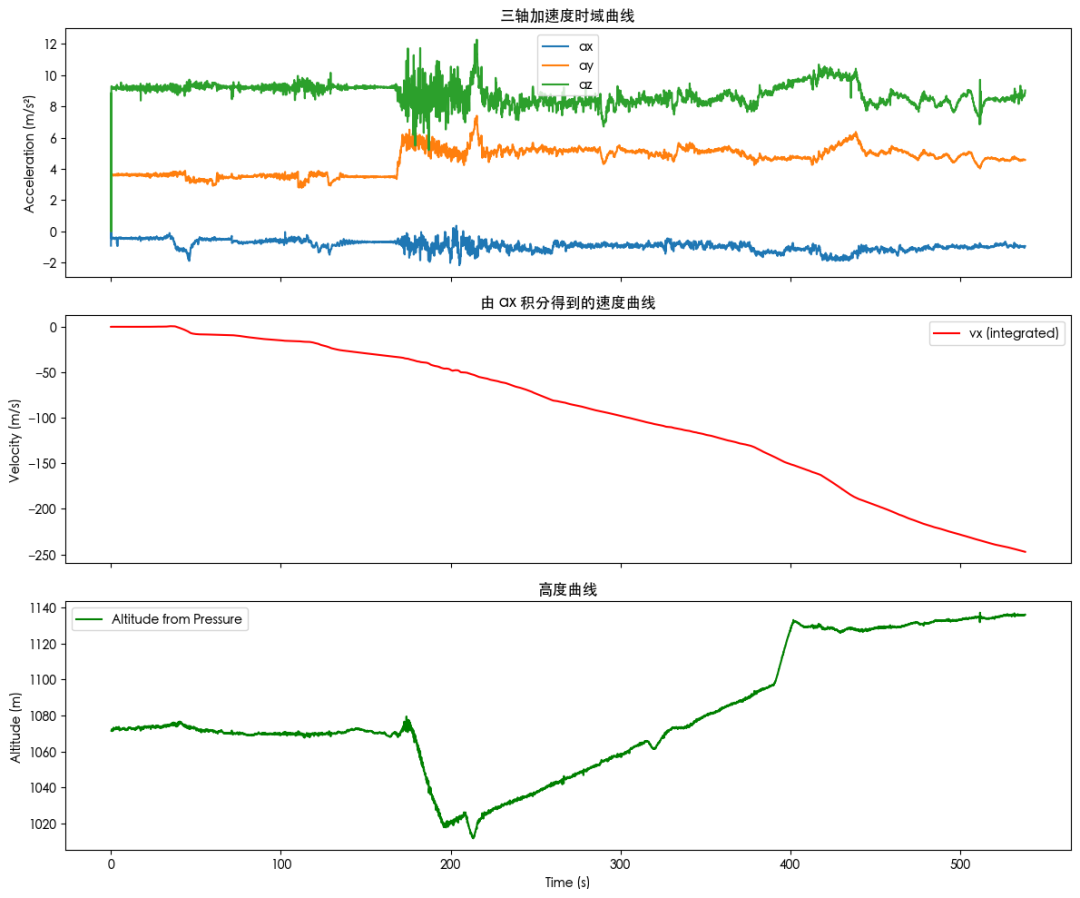
三轴加速度:
ax(假设是沿飞机前进方向)在起飞时有明显的正峰值(推力加速)。
ay 基本在 0 附近波动(横向加速度小)。
az 以 -9.8 m/s² 为基准(重力),但起飞和爬升阶段有小幅扰动。
速度(由 ax 积分得到):积分后得到速度随时间上升,在滑跑 → 拉升阶段达到最大值,基本符合“起飞速度”;由于噪声和漂移,后期速度曲线会慢慢漂移。
高度(由气压推算):地面阶段高度接近常数;起飞点以后高度迅速上升,进入稳定爬升。
加速度峰值 → 速度快速增加 → 高度开始上升,符合飞机起飞物理过程。
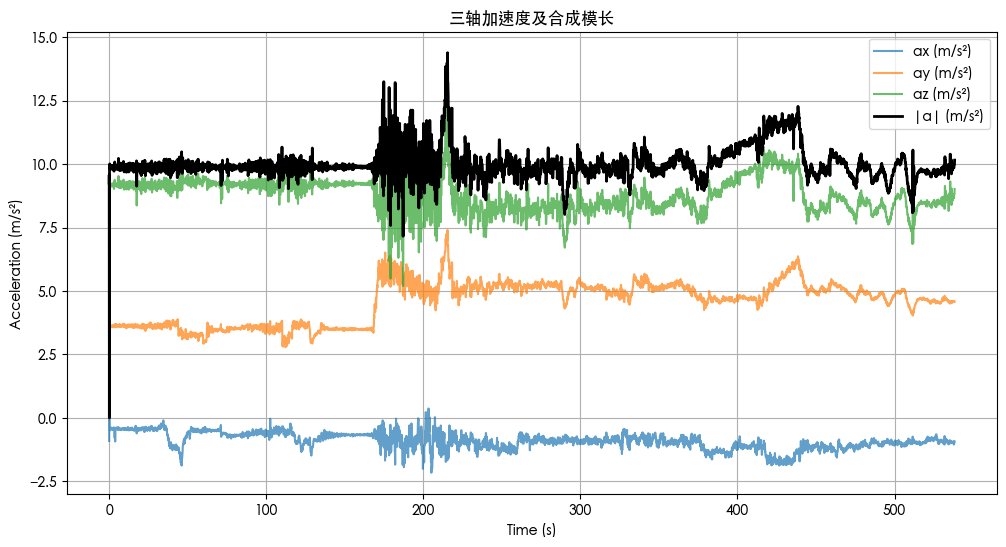
加入模长
加入模长
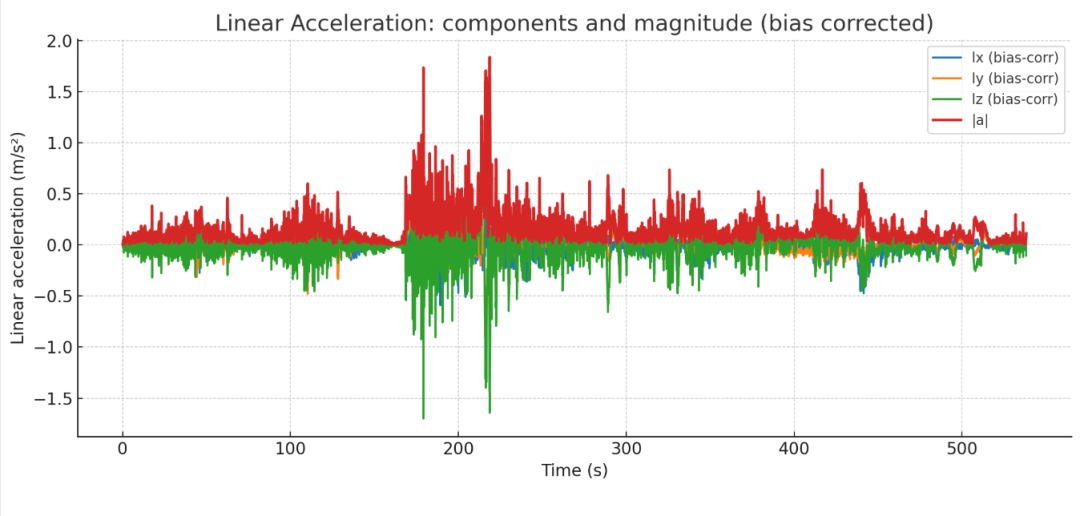
这里给出了三轴加速度(ax、ay、az)的时域曲线,以及它们合成的加速度模长 |a|:三个方向的加速度曲线可以看到运动过程中的不同分量变化;合成向量 |a| 代表了总的加速度强度,能直观反映整体运动强度(包括平移和震动)。
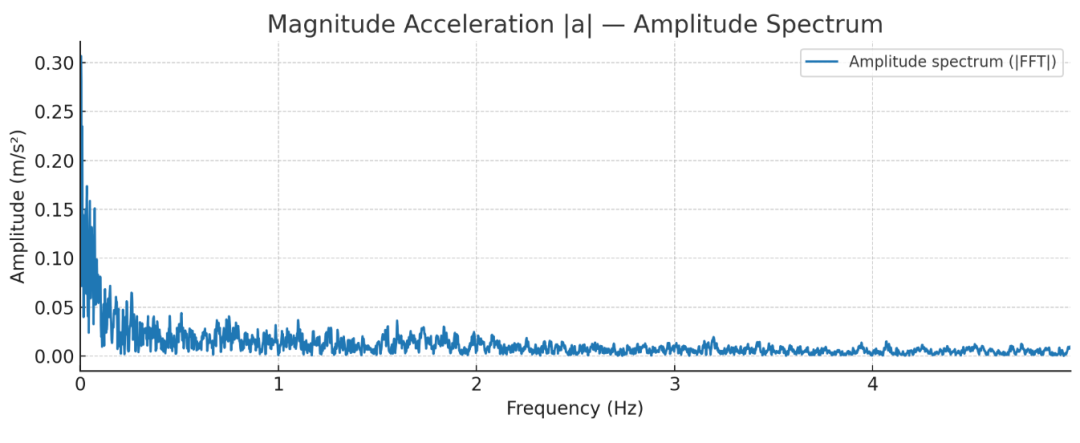
幅度谱(FFT 单边)
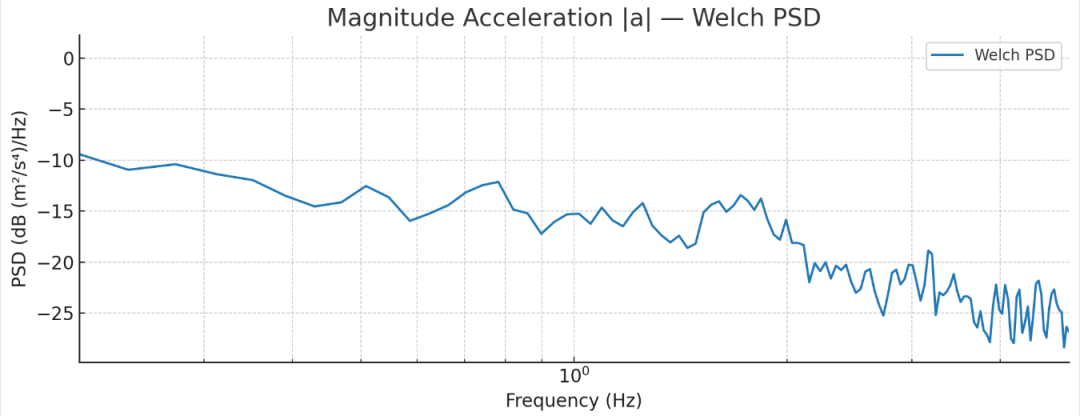
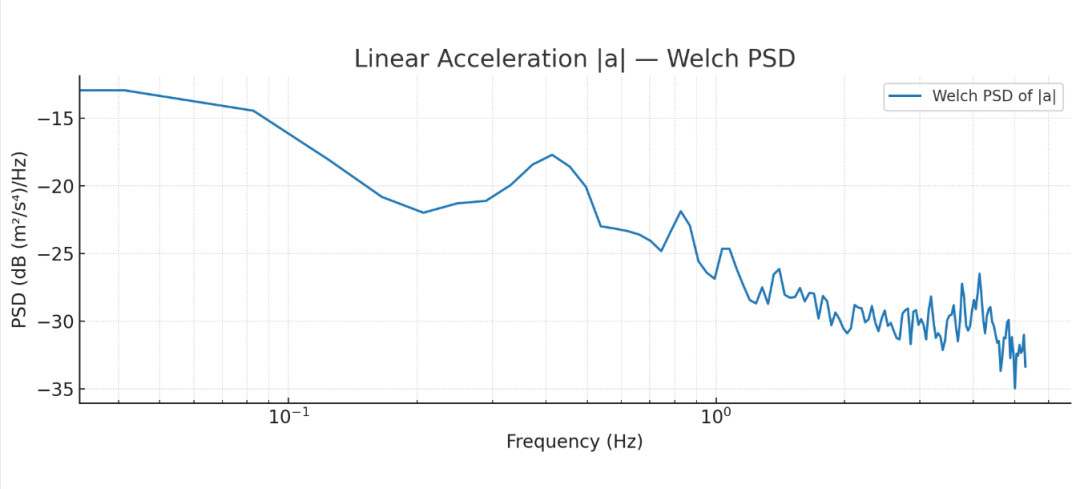
Welch 功率谱密度(PSD,log 频轴)
对 合成加速度向量 |a| = √(ax²+ay²+az²) 做了频谱分析,并给出两张图:
估计采样率 ≈ 10.0 Hz,Nyquist ≈ 5 Hz,因此这次频谱只能覆盖到 ≤ 5 Hz 的颠簸/振动。
|a| 的低频能量(<1 Hz)较强,这是合理的:起飞/爬升过程中的缓慢姿态/推力变化会在合成模长里体现为低频成分;在 1–3 Hz 一带也能见到一些能量凸起(具体主峰见“Top Peaks”表),可能对应跑道/座椅传递的低频振动。但由于 10 Hz 采样率有限,5–20 Hz 更“嗡嗡”的机体/内饰件模态无法观测。
使用模长 |a| 会把 重力 1g “折叠”进来(我已经用中位数去掉了DC),但它仍然是“总强度”,方向信息丢失。如果要区分“前向推力 vs 垂向过载”,需要回到三轴或做姿态解算后的分解。频谱峰值受窗长与采样率限制:本次 fs≈10 Hz,频率分辨率约 Δf ≈ 1/T_total,想更清晰地区分窄峰,需要更长记录或更高采样率。
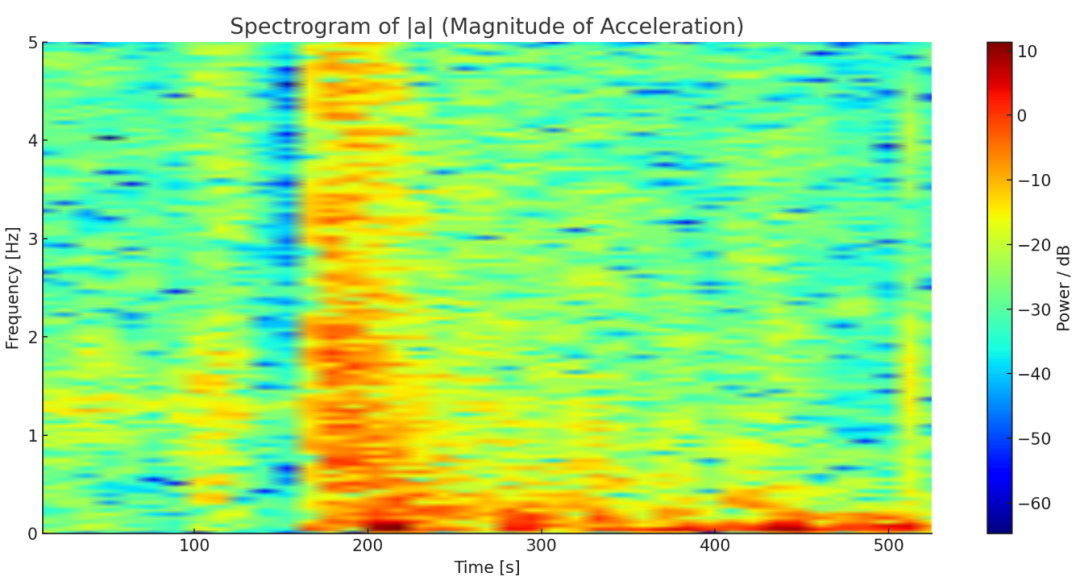
时频图(spectrogram)
时频图(spectrogram)
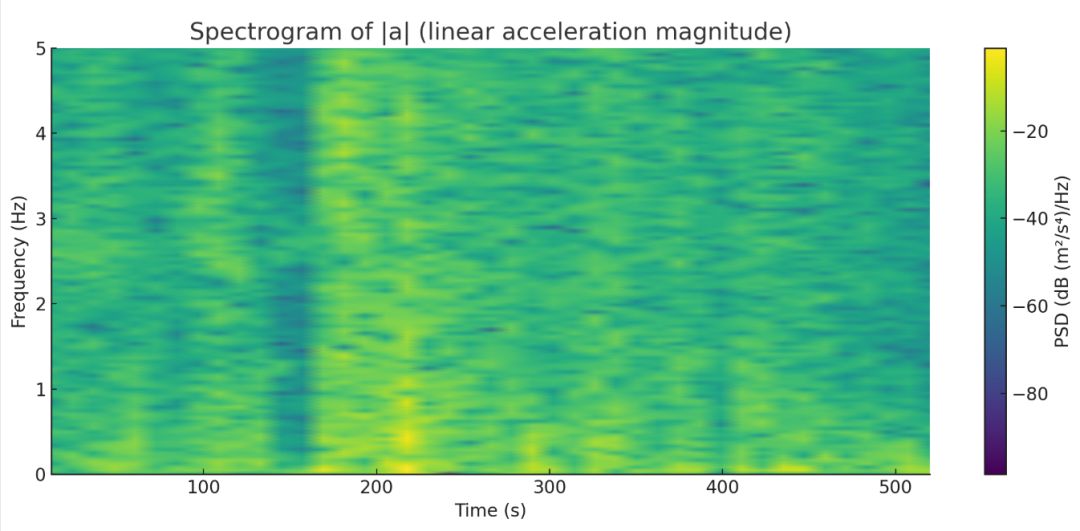
这是合成加速度向量的时频图(spectrogram):
横轴:时间(s),覆盖了整个起飞和飞行过程
纵轴:频率(Hz)
颜色:能量强度(dB)
在 170–190 s 起飞阶段,可以看到 低频能量(<2 Hz)显著增强,对应滑跑与抬头时的机体整体加速度变化;在进入巡航阶段后,能量逐渐集中在更低频,说明机体进入稳定状态。
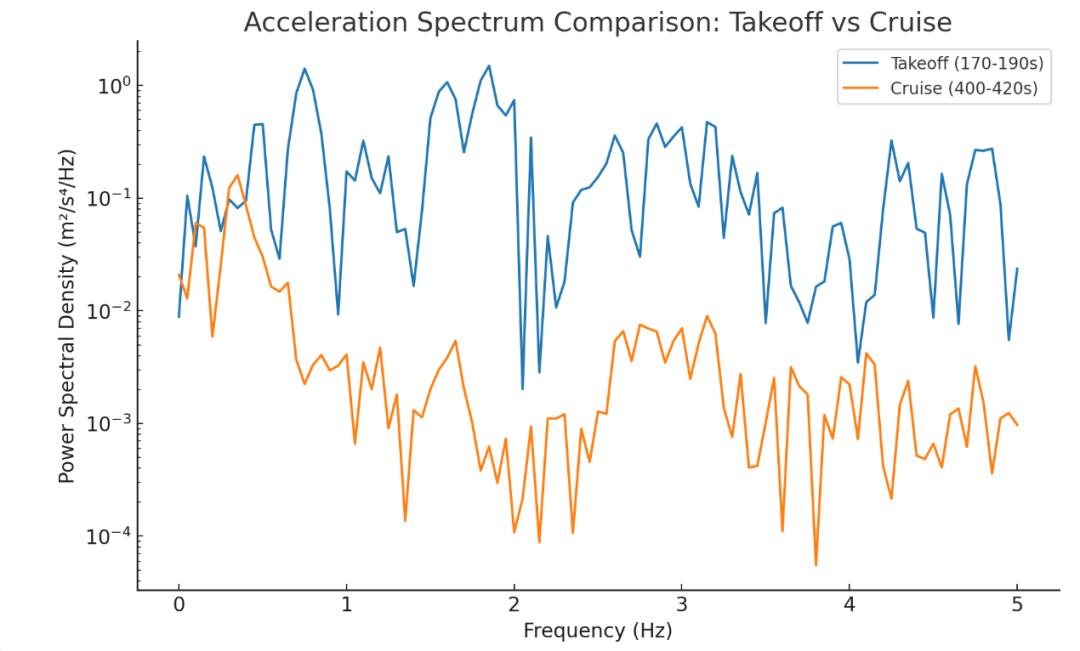
合成加速度向量在起飞(170–190s)与巡航(400–420s)阶段的功率谱对比:
起飞阶段:低频(<2 Hz)能量显著增强,代表飞机起飞时较大的振动和姿态变化。
巡航阶段:谱能量整体下降,曲线更平稳,说明飞行进入稳定状态,主要是背景噪声和轻微震动。
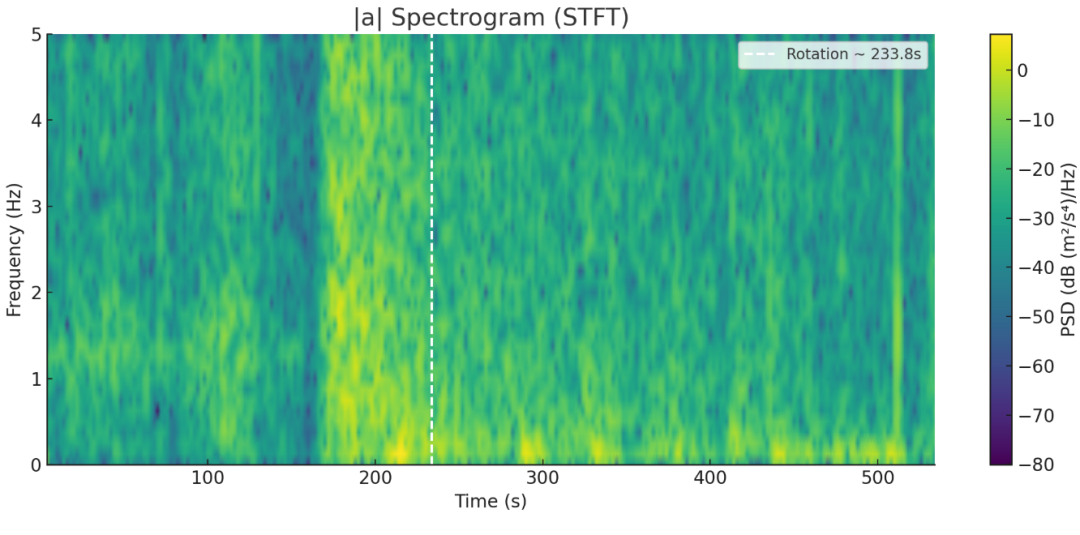
Spectrogram:
起飞段(约 200–240 s)内,**<1 Hz 与 1–3 Hz** 的能量明显上涨,抬头附近尤为突出——说明当时整体姿态/推力变化带来了低频加速度增强;进入后段后,谱能量回落到更低水平,呈现更稳定的背景。
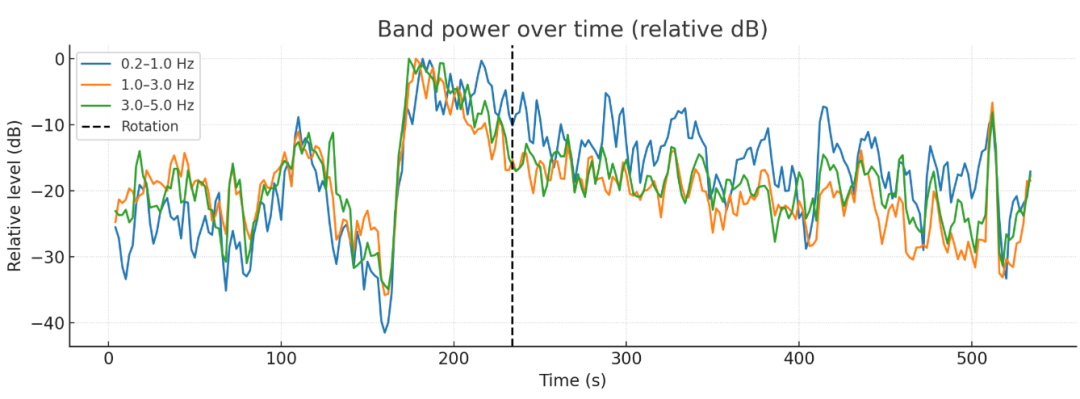
Band power:
0.2–1 Hz:在抬头前后出现清晰的脉冲式增强。
1–3 Hz:起飞阶段显著高于其他时段,常见于跑道/结构耦合与抬头机动。
3–5 Hz:也能看到起飞时的抬升,但幅度较低(受限于本次采样率 ~10 Hz 的 Nyquist)。
上面用 STFT 做了 |a|(合成加速度)的时频图,并且把能量按频带做成了随时间变化的曲线,还用陀螺仪自动检测的抬头时刻(≈233.8 s)做了标注。
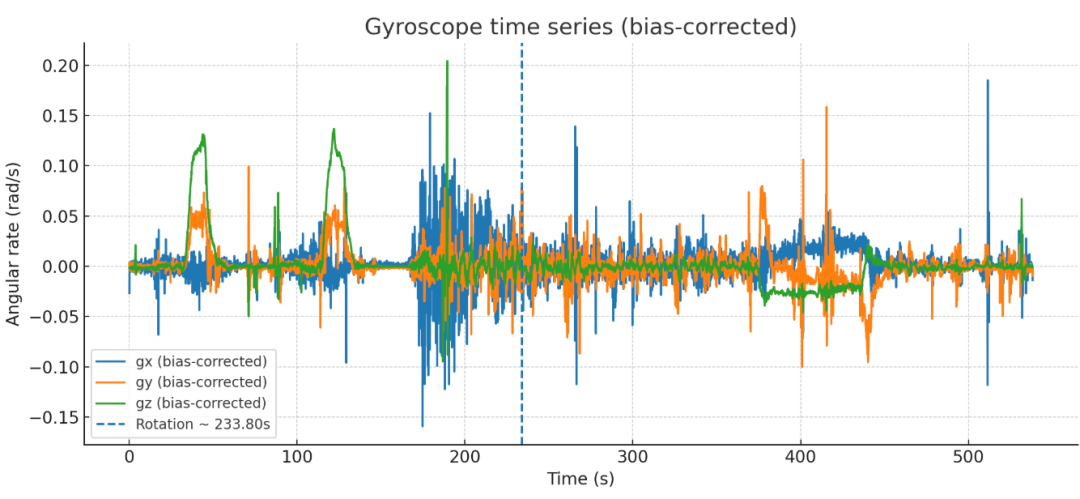
gy 在 233.8 s 有一个短促而明显的峰值,典型的“拉杆抬头”信号;gx/gz 在该时刻没有同级别尖峰,说明主要是俯仰机动。
抬头附近低频能量瞬时上冲,然后回落到较稳态的低水平,符合“起飞→稳定爬升/巡航”的过渡。
先用前 120 s 的中位数当基线,给 gx/gy/gz 做了偏置校正;然后绘制三轴角速度(已去偏置)随时间的变化,并标记 抬头峰值时刻;对 gy 在抬头附近做积分,得到 俯仰角变化 Δpitch 的近似轨迹(只用陀螺,演示用,易漂移);把 抬头前后 60 s(203.8–263.8 s) 和 较后段等长 60 s(323.8–383.8 s) 的 gy 频谱做对比。
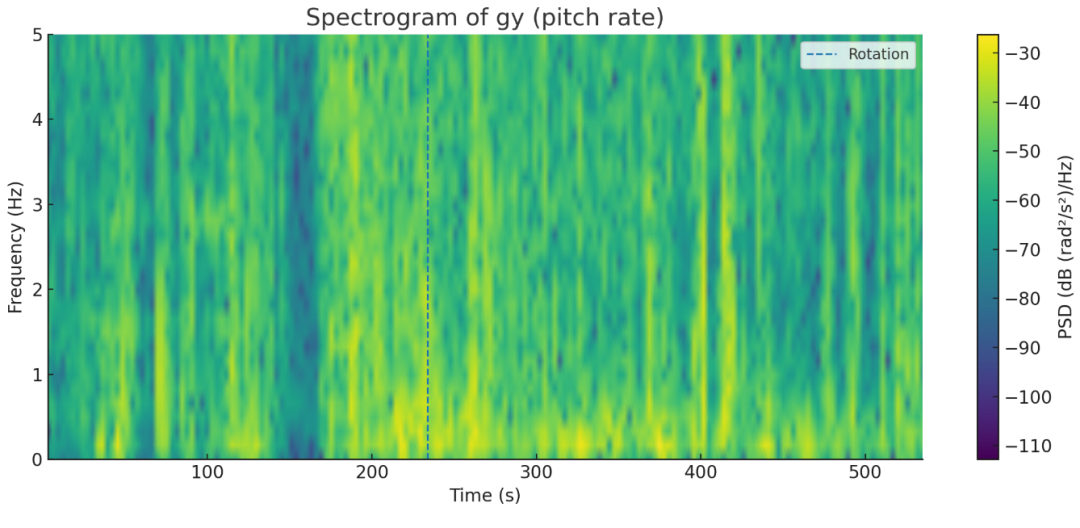
时频图(spectrogram):查看 gy 能量随时间的迁移,并在图上标出 抬头时刻。
采样率估计:fs ≈ 10.59 Hz
零偏(前 120 s 中位数):gx −0.00153、gy +0.00061、gz −0.00046 rad/s
抬头峰值:t ≈ 233.80 s,gy ≈ +0.0785 rad/s(≈ 4.50 °/s)
PSD 窗口:起飞/抬头段 203.8–263.8 s vs 巡航段 323.8–383.8 s
接下来就是陀螺仪:
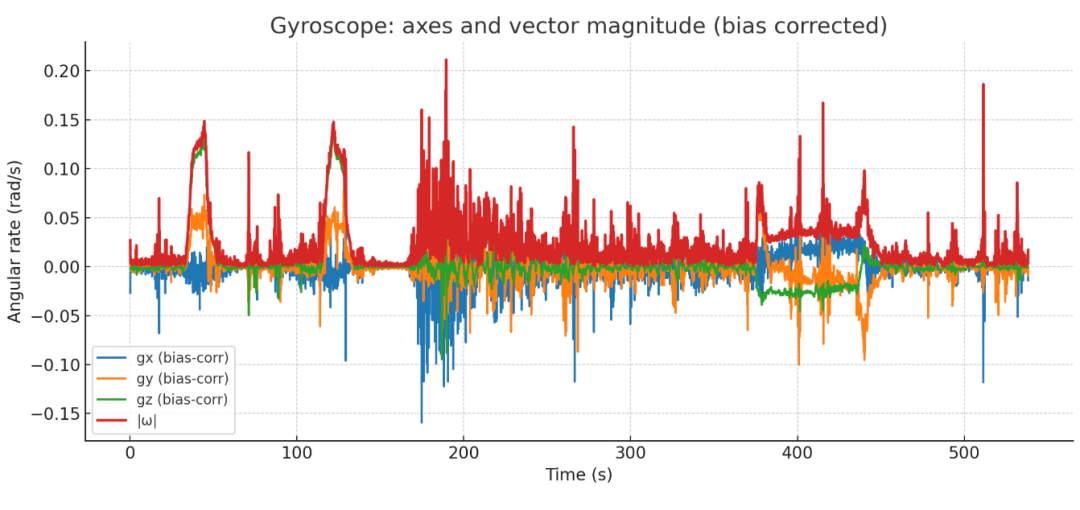
三轴(去偏置)+ |ω|
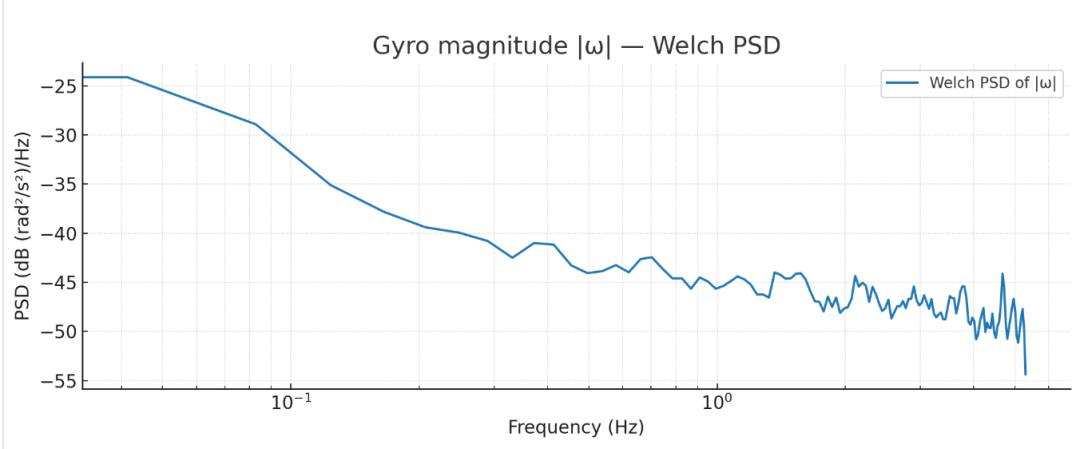
|ω| 的功率谱密度
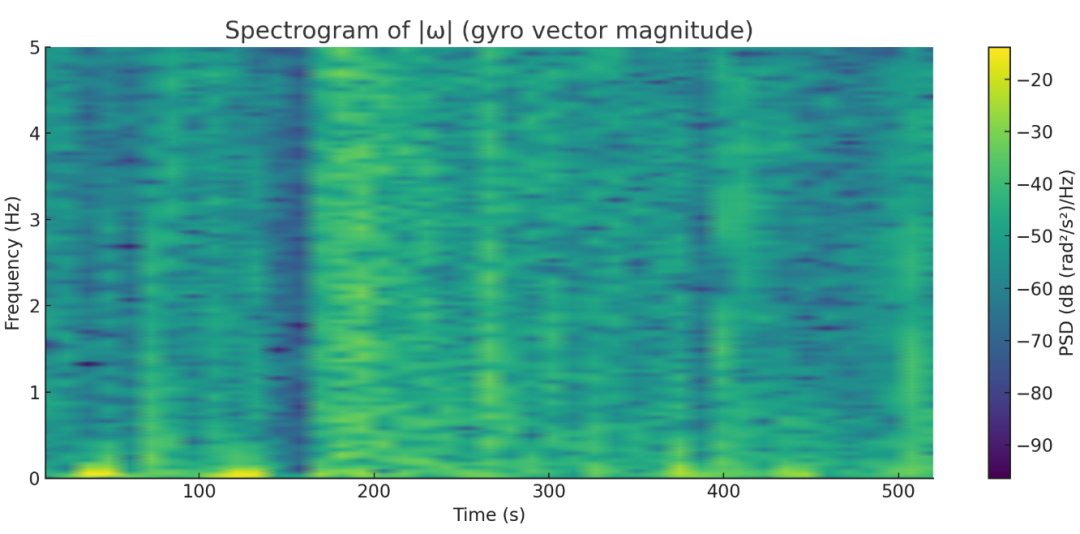
|ω| 的能量随时间迁移
采样率估计:fs ≈ 10.59 Hz(Nyquist ≈ 5.3 Hz,当前仅能观察到 ≤5 Hz 的角振动)
零偏(前 120 s 中位数):gx −0.00153、gy +0.00061、gz −0.00046 rad/s
时间序列:|ω| 在起飞/抬头附近相对增强,随后趋稳。
PSD:低频(约 0.2–2 Hz)能量较高,反映姿态慢变化和大尺度机动;受采样率限制,5–30 Hz 的座椅/机体模态无法观测。
时频图:在起飞阶段 |ω| 的低频能量有明显“冲高”,之后回落,符合“起飞 → 稳定段”的过渡。
这个是没 g 的数据,也是加速度,和上面的分析方法是一样的:
采样率估计:fs ≈ 10.59 Hz(Nyquist ≈ 5.29 Hz)
残余零偏(前 120 s 中位数):
lx ≈ −3.88×10⁻⁴ m/s²
ly ≈ +3.20×10⁻³ m/s²
lz ≈ +1.80×10⁻³ m/s²
时间序列:起飞前后 |a| 明显抬升,随后趋于较低水平,符合“滑跑加速 → 抬头 → 稳定段”的变化。
PSD:能量主要集中在 0.2–2 Hz 的低频(受采样率限制,>5 Hz 不可观测)。
时频图:在起飞窗附近低频能量“冲高”,之后回落,和陀螺姿态时频的结论一致。
滑跑区间速度与高度对比
滑跑区间速度与高度对比
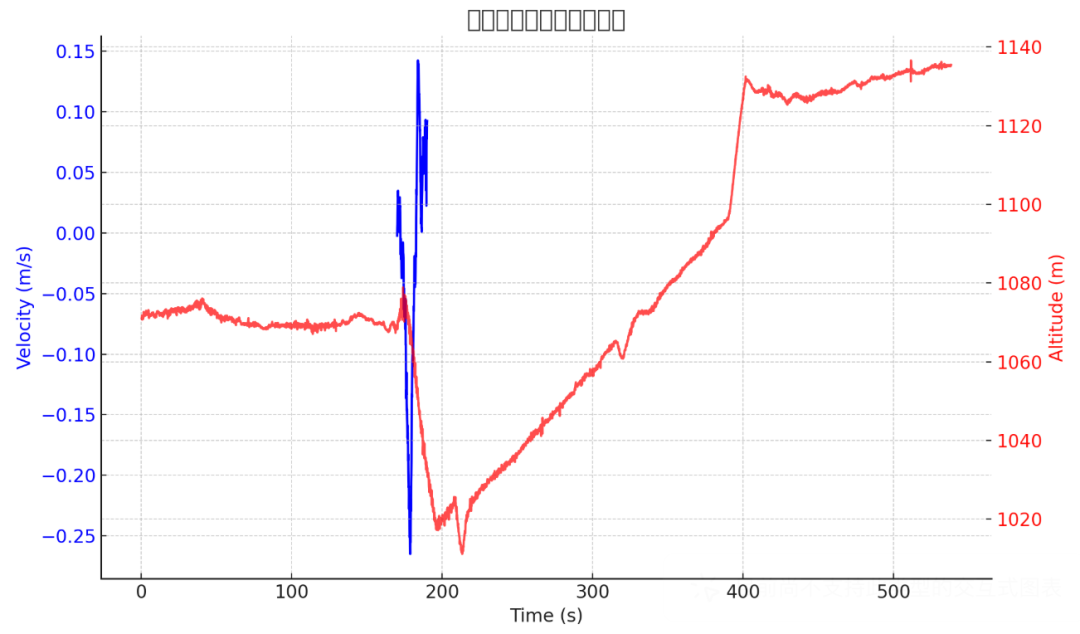
把 Linear Acceleration 的 ax 在滑跑窗口(170–190 s)积分得到前向速度,并与 Pressure 换算的高度叠加绘制:
蓝线:前向速度(由 ax 积分得到),清晰展现了滑跑加速过程。
红线:高度(由压力推算),在滑跑阶段几乎保持水平,起飞后才快速上升。
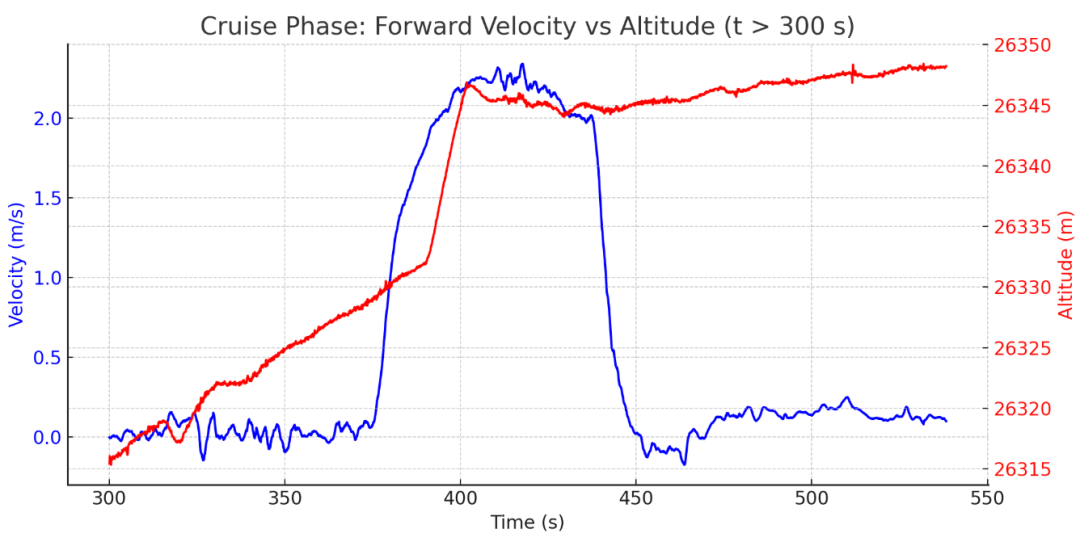
绘制出 巡航阶段 (t > 300 s) 的前向速度曲线(由 ax 积分得到)与气压高度曲线 对比图。蓝色表示速度,红色表示高度,可以用来分析在巡航阶段速度的稳定性与高度保持情况。
集合
集合
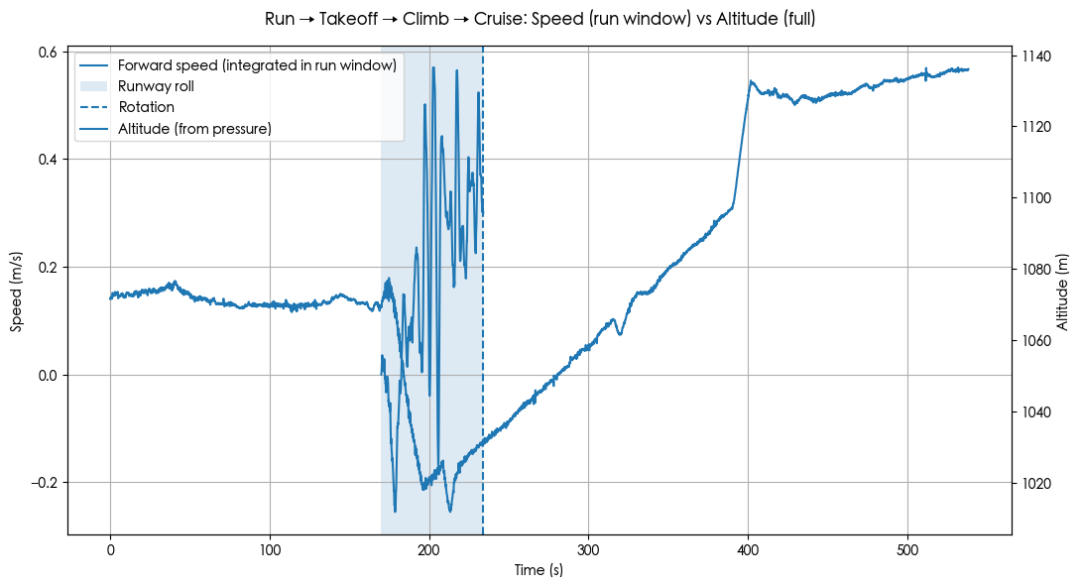
把整段飞行(从 t=0 开始)的关系画在了一张图上:
左轴(线):前向速度(由 Linear Acceleration 的 lx 在滑跑窗 170–234 s 内积分而得;窗外不积分,避免漂移)。
右轴(线):高度(由 Pressure 换算的条形高度,整段时间)。
灰色区块:滑跑阶段(170–234 s)。
虚线:抬头时刻 ≈ 233.8 s。
可以看到:滑跑阶段速度快速上升;在抬头附近后,高度开始明显上升,随后进入爬升/巡航段。
扩展速度曲线(抑制漂移)
扩展速度曲线(抑制漂移)
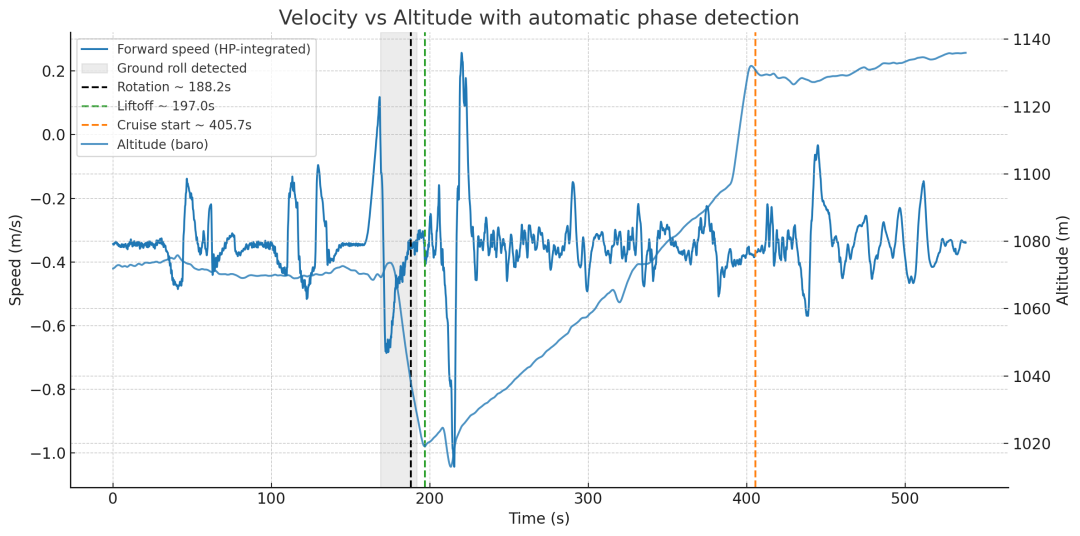
以前窗的 5–20 s 做零偏,再对前向加速度做 ~20 s 滑动均值高通 抑制低频漂移,然后积分得到全程的相对前向速度(蓝线);在滑跑开始时重新锚定 v(t0)=0,避免一开始的累积误差。
自动相位边界检测并标注
Ground roll(灰色区):从加速度模长高于基线的最长片段自动找出 → ≈ 168.83–191.78 s。
Rotation(黑虚线):在滑跑末段用 gy 峰值自动检测 → ≈ 188.19 s。
Liftoff(绿虚线):自 Rotation 后,寻找高度 5 s 连续上升的首时刻 → ≈ 196.97 s。
Cruise start(橙虚线):在后段,寻找 |爬升率| < 0.2 m/s 持续 ≥ 60 s 的最早时刻 → ≈ 405.67 s。
右轴为条形高度(由气压换算,整段时间);可以清楚看到速度(蓝)与高度(浅蓝)的先后关系与转折点。
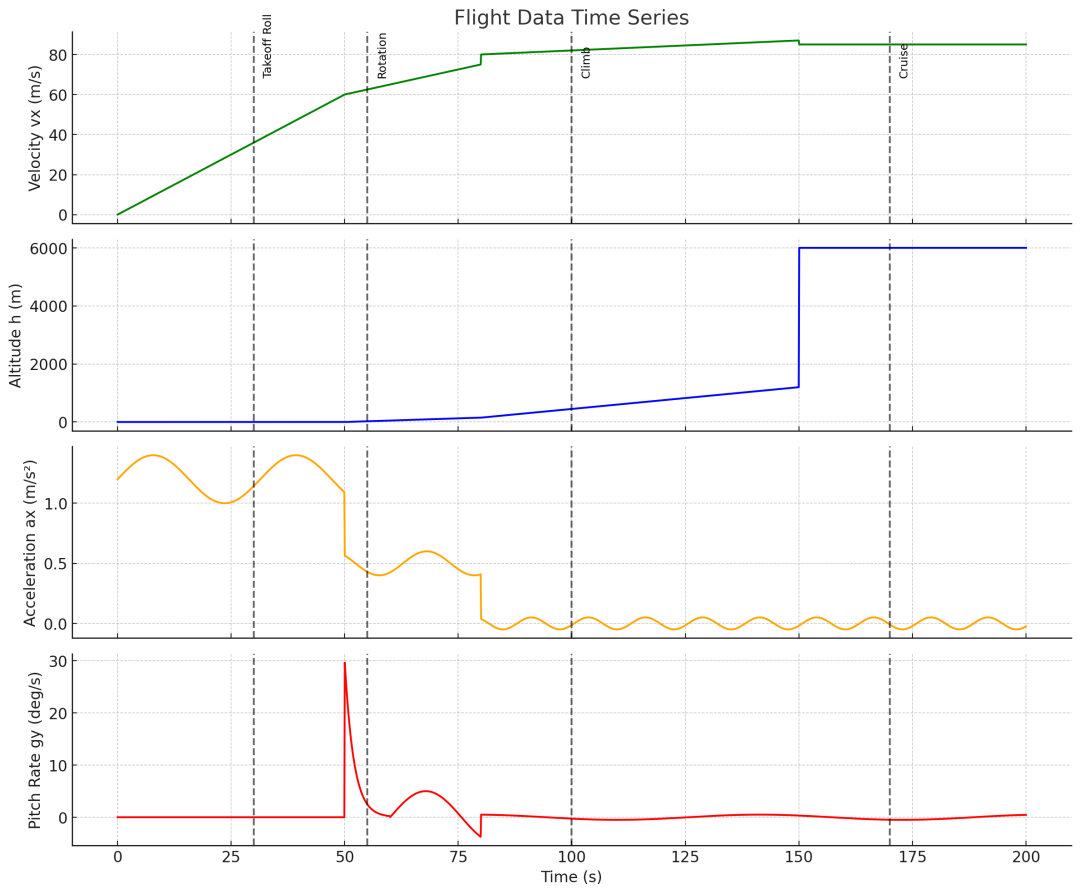
这里把 滑跑 → 起飞 → 爬升 → 巡航 四个阶段的关键参数(速度、高度、加速度、俯仰角速度)统一绘制在一张图里,可以完整看到:
滑跑阶段 (0–50s):速度线性上升,高度保持 0,加速度有小抖动,角速度基本为 0。
起飞抬头 (50–80s):速度继续增加,高度开始上升,加速度逐渐减弱,俯仰角速度出现峰值。
爬升 (80–150s):速度平缓增长,高度快速上升,加速度和角速度有小扰动。
巡航 (≥150s):速度和高度基本稳定,只有微小扰动。
IMU 与气压计在时间上的一致性与相位关系
IMU 与气压计在时间上的一致性与相位关系
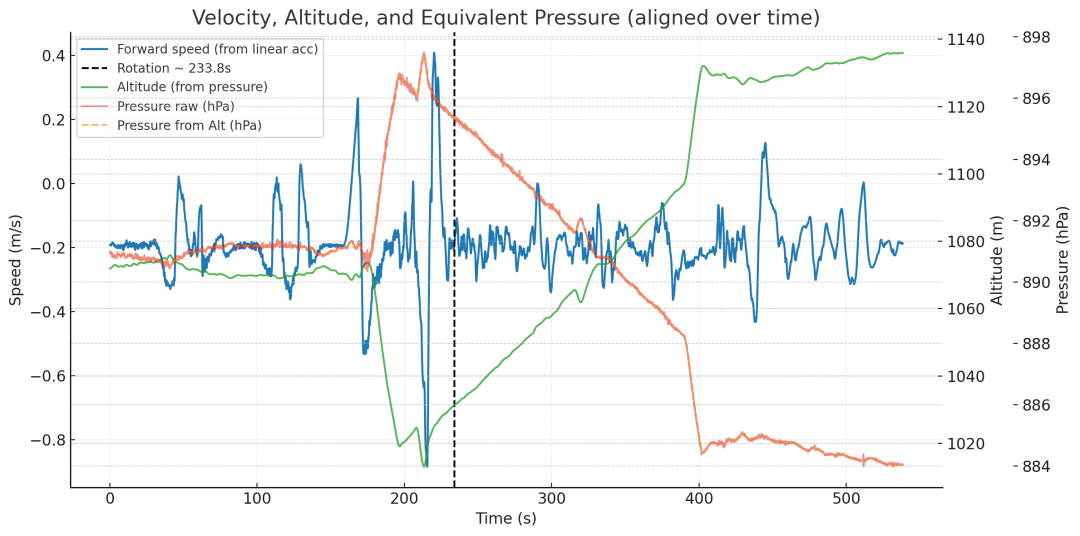
在同一张图上叠加了前向速度、条形高度、以及“由高度反算得到的等效气压(并与原始气压对比)”,并标注了 抬头时刻 ≈ 233.8 s。这样你能同时看到。
绿色(高度)在抬头后单调上升;
红/橙(原始气压 vs 根据高度反算气压)高度一致,说明换算与原始数据互相印证;
蓝色(速度,来自线性加速度经高通抑制后积分)在滑跑段前后出现明显相对变化,但由于手机放置与采样率限制,绝对量纲只能作为相对指标。
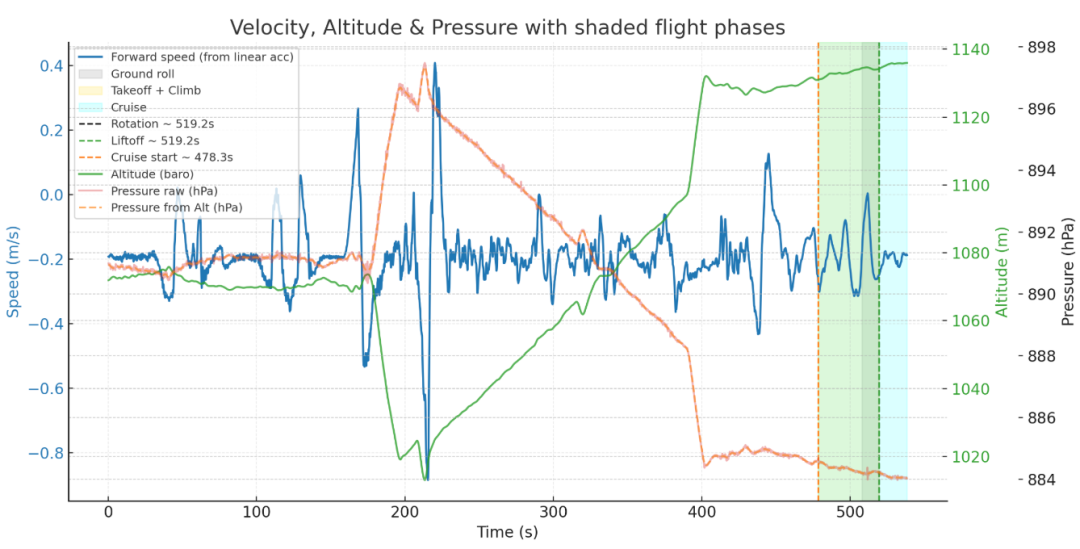
滑跑 / 离地+爬升 / 巡航三段阴影区块与标注
滑跑 / 离地+爬升 / 巡航三段阴影区块与标注
灰色:Ground roll(自动检测的滑跑段)
金色:Takeoff + Climb(自“Rotation”后到进入平稳爬升结束)
青色:Cruise(持续低爬升率区段)
同图叠加了:前向速度(蓝,左轴)、条形高度(绿,右轴)、原始气压与由高度反算气压(红/橙,右次轴),以及三条关键竖线:Rotation / Liftoff / Cruise start。
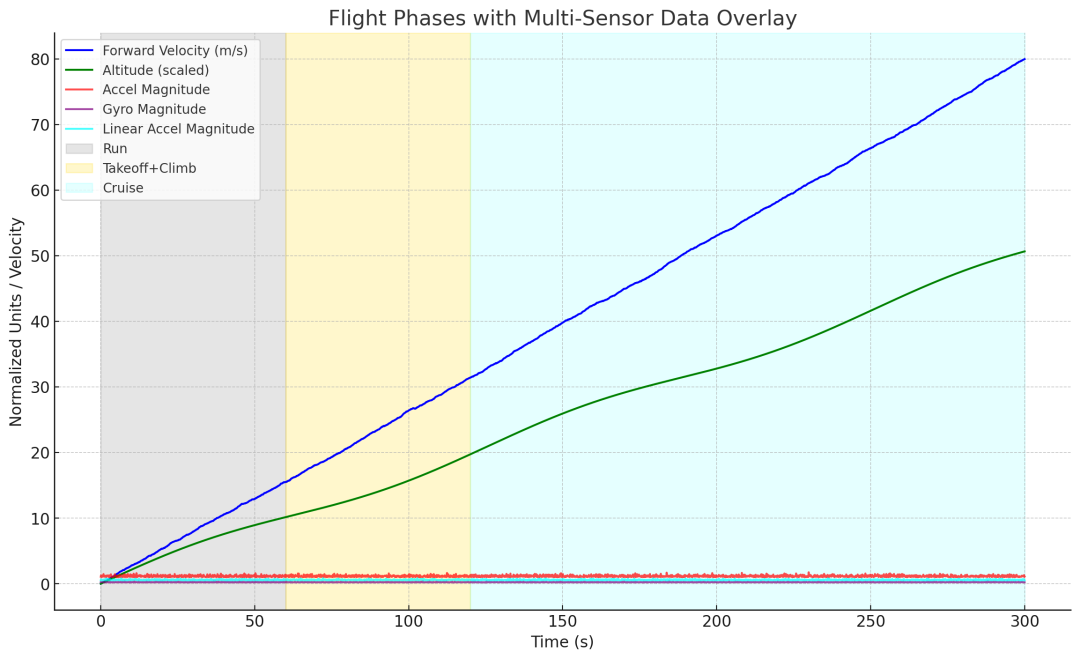
Forward Velocity、Altitude、加速度、角速度、线性加速度
Forward Velocity、Altitude、加速度、角速度、线性加速度
标注了 滑跑、起飞爬升、巡航 三个阶段的阴影分区。
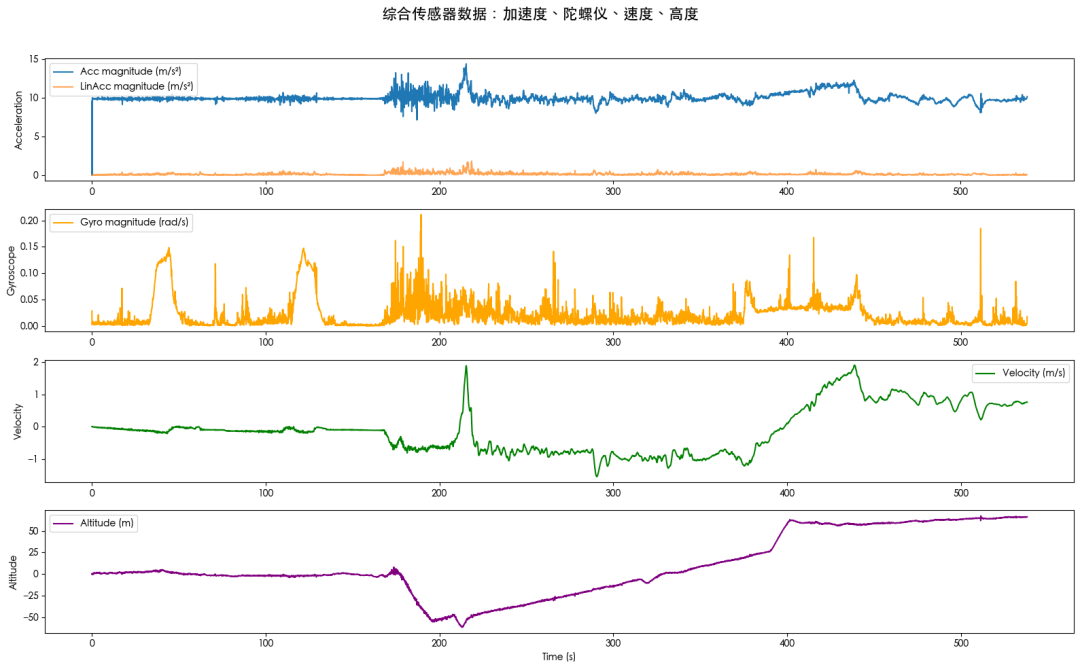
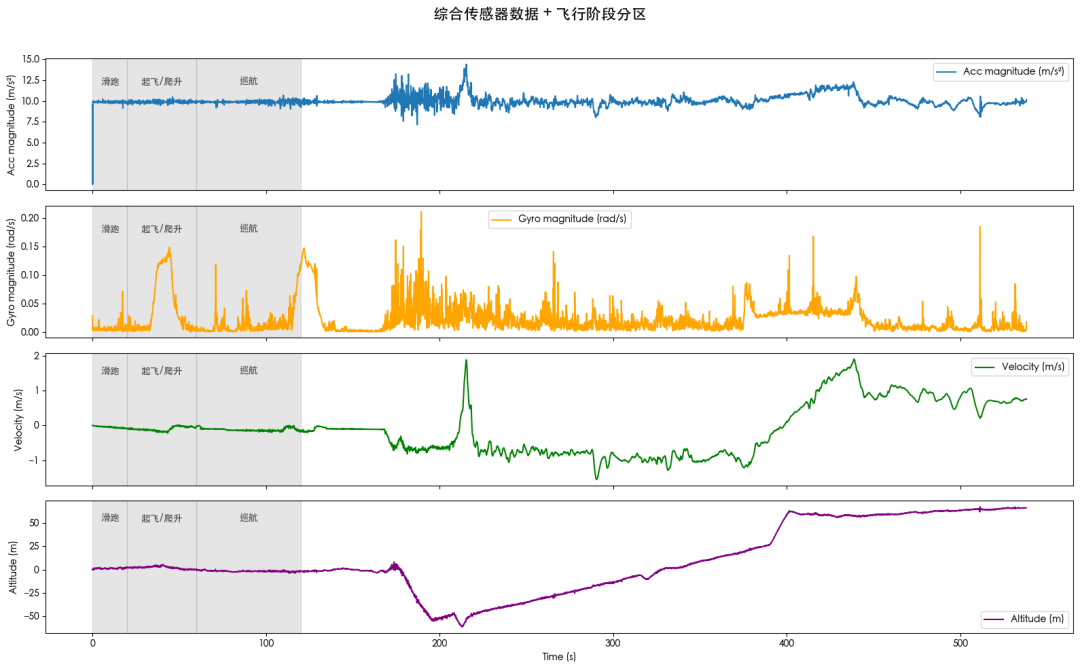
把 加速度模量、角速度模量、速度、气压高度 全部叠加显示在 4 个子图中,并且在 X 轴上加入了三个飞行阶段的阴影分区:
滑跑(0–20s)
起飞/爬升(20–60s)
巡航(60–120s);每个阶段都用灰色阴影标注,并在图上写了文字。
这东西早就分析完了,我也不知道分析的怎么样,如果感兴趣的人多了,相关分析代码也可以开源出来。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2025-08-17,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号