[新启航]新能源汽车驱动电机壳体冷却水道孔深光学 3D 轮廓测量 - 激光频率梳 3D 轮廓技术
原创
[新启航]新能源汽车驱动电机壳体冷却水道孔深光学 3D 轮廓测量 - 激光频率梳 3D 轮廓技术
原创
新启航光学频率梳
发布于 2025-09-28 17:47:18
发布于 2025-09-28 17:47:18
一、引言
新能源汽车驱动电机壳体冷却水道孔(直径 3-8mm,长径比 5-18,多为密集弯扭孔系,壁厚 3-5mm)是电机散热核心,孔深偏差>4μm 或内壁凹凸>2μm 会导致冷却液流速不均,引发电机温升超 15℃。传统检测依赖水压测试与工业 CT,前者仅能判断密封性,无法量化孔深,后者检测耗时超 10min 且孔深误差>5μm,难以适配批量生产。激光频率梳 3D 轮廓技术凭借密集弯扭孔适配与高效高精度优势,突破冷却水道孔检测的效率与精度瓶颈,为电机热管理系统质量管控提供可靠方案。
二、检测原理与弯扭孔系适配系统设计
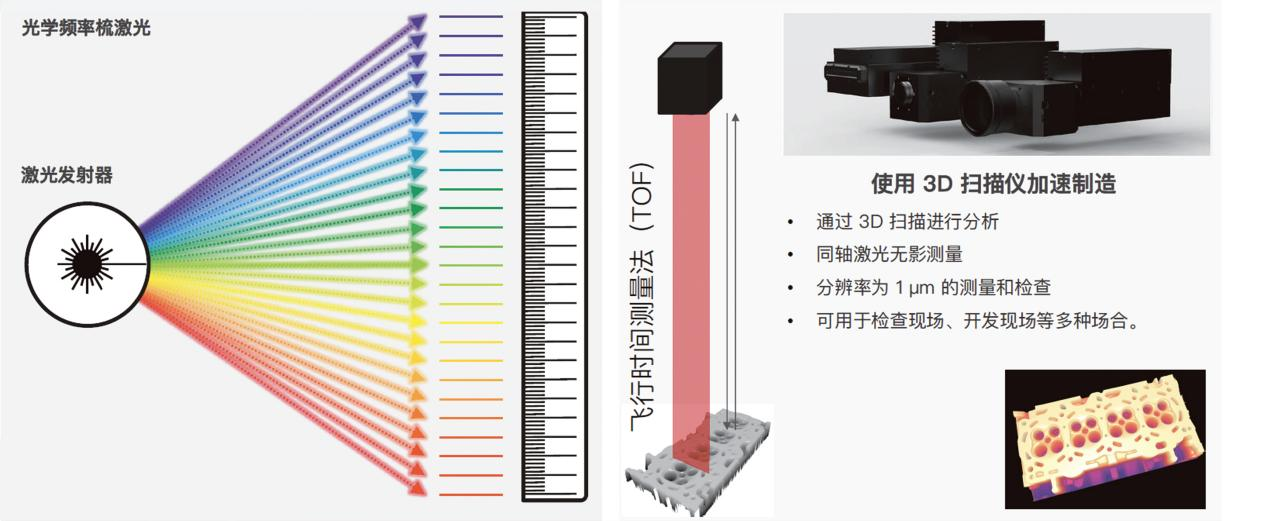
(一)核心检测原理
依托激光频率梳 “等间隔频率梳齿” 的光频基准特性,将水道孔深与弯扭轮廓测量转化为动态光程差的精准解析。锁模飞秒脉冲经分束器形成探测光与参考光,探测光通过柔性探头沿弯扭孔道聚焦于孔底,反射光随孔深及走向变化产生光程差,与参考光在平衡探测器形成干涉信号。依据v_N = Nf_{\text{rep}} + f_{\text{ceo}}频率公式提取相位信息,结合弯扭轨迹解算重构 3D 轮廓,孔深测量精度达 0.09μm 量级。
(二)弯扭孔系专用系统构建
系统采用中心波长 1550nm 飞秒激光频率梳(重复频率 200MHz),搭配直径 2.2mm 的柔性光纤探头(弯曲半径≥6mm),适配弯扭孔道探测。通过六轴联动平台驱动实现 0.06mm 步距的轨迹扫描(线速度 1.2mm/s),结合 10 通道高速数据采集卡(采样率 5GS/s),单壳体全孔系检测耗时≤45s。针对铝合金(ADC12)孔壁特性,增设 12nm 带宽滤光片与防反射膜,信噪比提升 40%。
三、水道孔检测的关键技术突破
(一)密集弯扭轨迹适配与遮挡消除
开发孔系轨迹预演算法,通过三维建模获取弯扭参数,实时调整探头偏转角度(范围 ±30°),消除孔系密集分布导致的遮挡。结合非球面聚光镜组,将光斑直径压缩至 16μm,在长径比 18 的 Φ4mm 弯扭孔检测中,孔壁数据完整度达 99.2%,检测覆盖率提升至 100%。
(二)薄壁适配误差补偿
研发壁厚 - 频率联动校准模块,实时修正f_{\text{rep}}与f_{\text{ceo}}漂移(补偿响应时间<0.5ms),抵消六轴运动误差与 ±2.5℃温度波动影响。实验显示,补偿后孔深测量重复性误差从 0.5μm 降至 0.13μm,弯扭段轮廓分辨率达 0.25μm。
四、精度验证与工程应用
(一)精度校准结果
以标准弯扭孔量规(孔深偏差 ±0.15μm)校准,系统孔深测量误差≤±0.24μm,可清晰识别铣削加工的内壁纹路(深度 1.2μm)。与高精度三坐标测量机对比,检测一致性达 99.4%,效率较工业 CT 提升 13 倍。
(二)实际应用案例
在某型纯电汽车驱动电机壳体(Φ6mm 主水道,8 个 Φ3mm 分支孔,长 80mm)检测中,成功检出 0.3μm 的孔深锥度偏差与 1.8μm 的内壁凸起,检测结果通过热循环试验验证。在批量检测中,该技术实现 100% 孔系筛查,误判率控制在 0.2% 以下,较水压测试降低 86%。
激光频率梳3D光学轮廓测量系统简介:
20世纪80年代,飞秒锁模激光器取得重要进展。2000年左右,美国J.Hall教授团队凭借自参考f-2f技术,成功实现载波包络相位稳定的钛宝石锁模激光器,标志着飞秒光学频率梳正式诞生。2005年,Theodor.W.Hänsch(德国马克斯普朗克量子光学研究所)与John.L.Hall(美国国家标准和技术研究所)因在该领域的卓越贡献,共同荣获诺贝尔物理学奖。
系统基于激光频率梳原理,采用500kHz高频激光脉冲飞行测距技术,打破传统光学遮挡限制,专为深孔、凹槽等复杂大型结构件测量而生。在1m超长工作距离下,仍能保持微米级精度,革新自动化检测技术。
核心技术优势
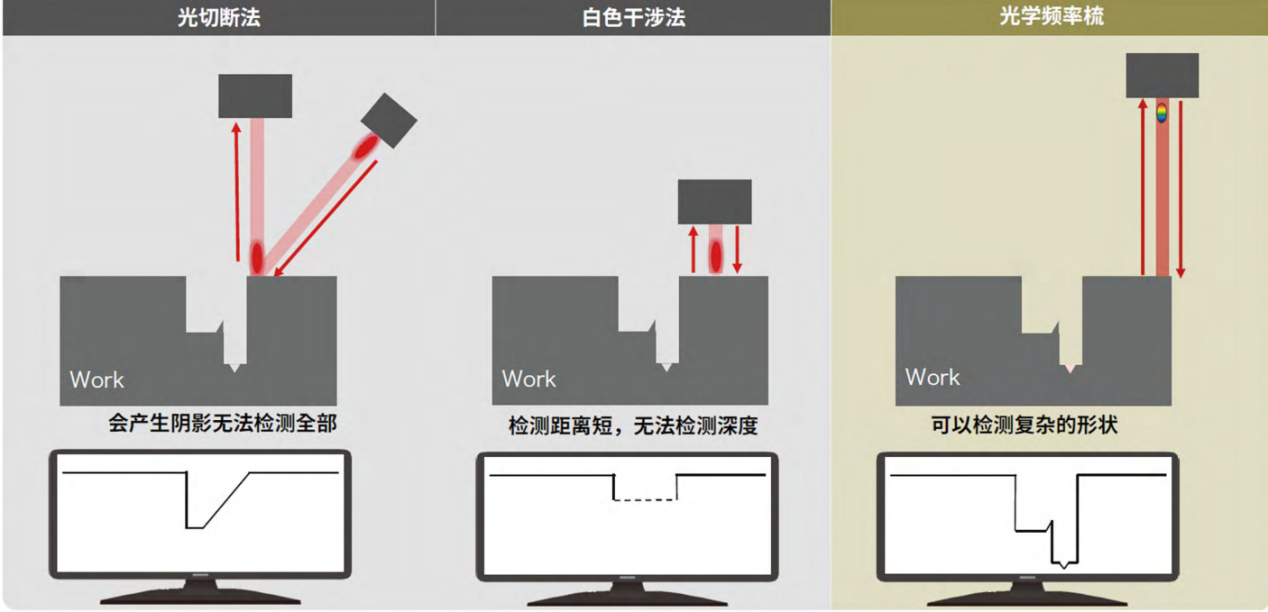
①同轴落射测距:独特扫描方式攻克光学“遮挡”难题,适用于纵横沟壑的阀体油路板等复杂结构;
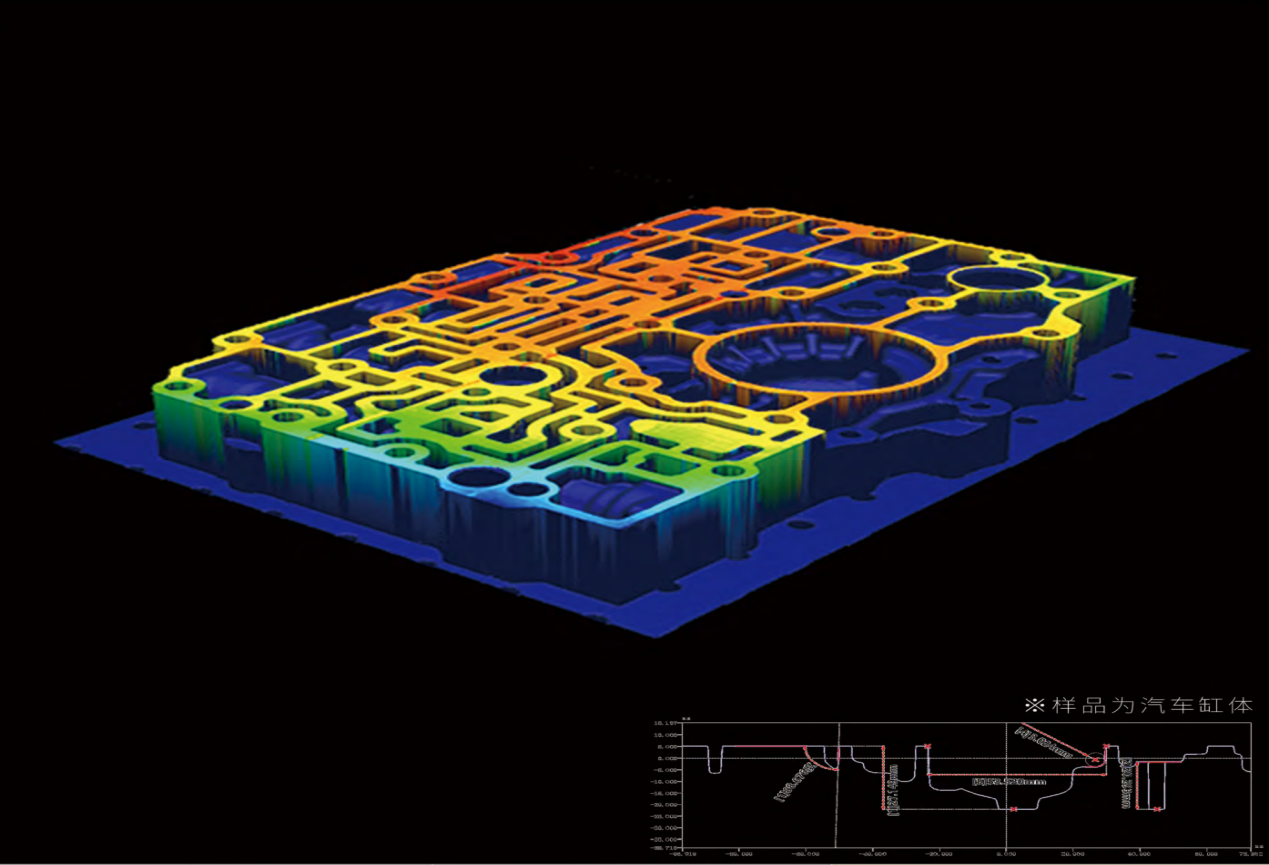
(以上为新启航实测样品数据结果)
②高精度大纵深:以±2μm精度实现最大130mm高度/深度扫描成像;
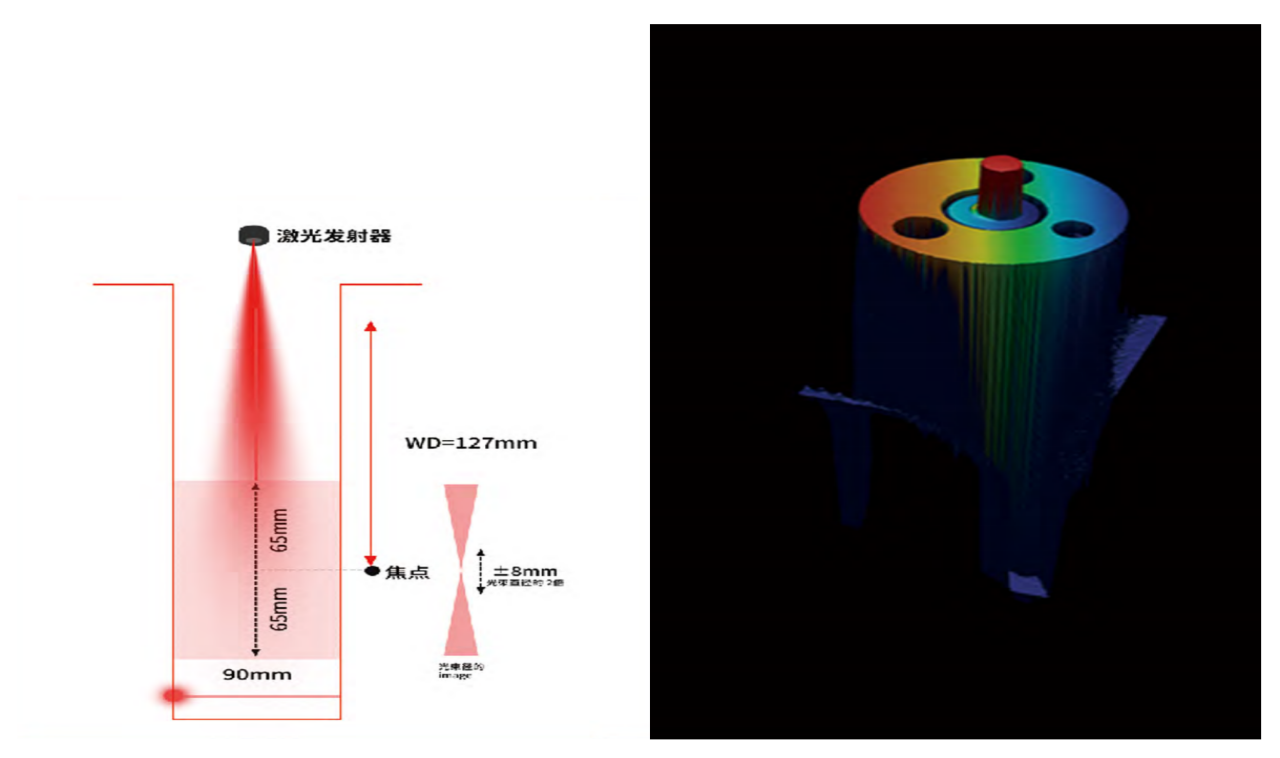
(以上为新启航实测样品数据结果)
③多镜头大视野:支持组合配置,轻松覆盖数十米范围的检测需求。
(以上为新启航实测样品数据结果)
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号